自适应移动的图像采集设备、身份识别方法、系统及装置与流程
本说明书涉及人机交互,尤其涉及自适应移动的图像采集设备、身份识别方法、系统及装置。
背景技术:
1、随着车辆智能化的发展,人们正在逐步告别传统的基于车钥匙的启动方式,通过基于无钥匙启动技术,用户可以无需担心车钥匙丢失或者损坏而导致的无法进入车辆的问题,通过无钥匙启动,用户不再依赖于传统的钥匙,通过指纹解锁或者终端解锁即可进入车辆。
2、而随着人脸识别技术的成熟,基于人脸识别技术来实现无钥匙启动成为了越来越流行的方式。一方面,人脸识别技术更加智能化,对身份的验证更加精准,并且只允许特定用户解锁车辆,可以进一步提高车辆使用时的安全性;另一方面,人脸识别技术可以解放用户的双手,只需刷脸即可解锁车辆,可以进一步提升车辆使用时的便捷性。因此,人脸识别技术凭借其安全、准确和有效的优点,被愈来愈多的用户所认可。
3、然而,在实际使用时,由于车辆搭载的图像采集设备采集到的图像包含的范围有限,导致部分情况下人脸识别的准确率较低。比如,不同身高的用户在进行人脸解锁时可能识别的准确率有所差别,需要用户弯下腰或者踮起脚才能准确识别;又如,对于不同来向的用户,人脸解锁时的准确率差别也比较大,需要用户尽量正对图像采集设备才能准确识别。
4、因此,为了提升用户体验,避免用户需要主动调整才能提高人脸识别准确率的问题,需要对图像采集设备进行改进。
技术实现思路
1、有鉴于此,本说明书一个或多个实施例提供自适应移动的图像采集设备、身份识别方法、系统及装置,以解决相关技术中存在的问题。
2、为实现上述目的,本说明书一个或多个实施例提供技术方案如下:
3、根据本说明书实施例的第一方面,提供一种自适应移动的图像采集设备,包括:
4、采集模块,用于采集车辆周围环境的图像;其中,所述图像采集设备安装于车辆的车体结构中,所述车体结构上安装有齿条和齿圈;
5、控制模块,用于接收车辆的处理器根据车载雷达接收到的反射信号生成的移动指令;将所述图像发送至车辆的处理器进行身份识别;其中,所述反射信号由车辆周围环境中的障碍物反射雷达信号产生;所述移动指令包括平移指令和旋转指令;
6、以及,用于响应于所述平移指令,控制第一机构执行伸展动作,以使第一齿轮与所述齿条啮合,控制第二机构执行收缩动作,以使第二齿轮与所述齿圈分离,并通过驱动所述第一齿轮带动所述图像采集设备沿所述齿条的长度方向平移;响应于所述旋转指令,控制所述第一机构执行收缩动作,以使所述第一齿轮与所述齿条分离,控制所述第二机构执行伸展动作,以使所述第二齿轮与所述齿圈内啮合,并通过驱动所述第二齿轮带动所述图像采集设备以所述齿圈的圆心为中心旋转;其中,所述第一机构和所述第二机构分别与所述图像采集设备固定连接,所述第一机构与所述第一齿轮固定连接,所述第二机构与所述第二齿轮固定连接。
7、根据本说明书实施例的第二方面,提供一种车辆,所述车辆包括了上述图像采集设备。
8、根据本说明书实施例的第三方面,提供一种身份识别方法,应用于车辆,所述车辆搭载了至少一个自适应移动的图像采集设备,所述方法包括:
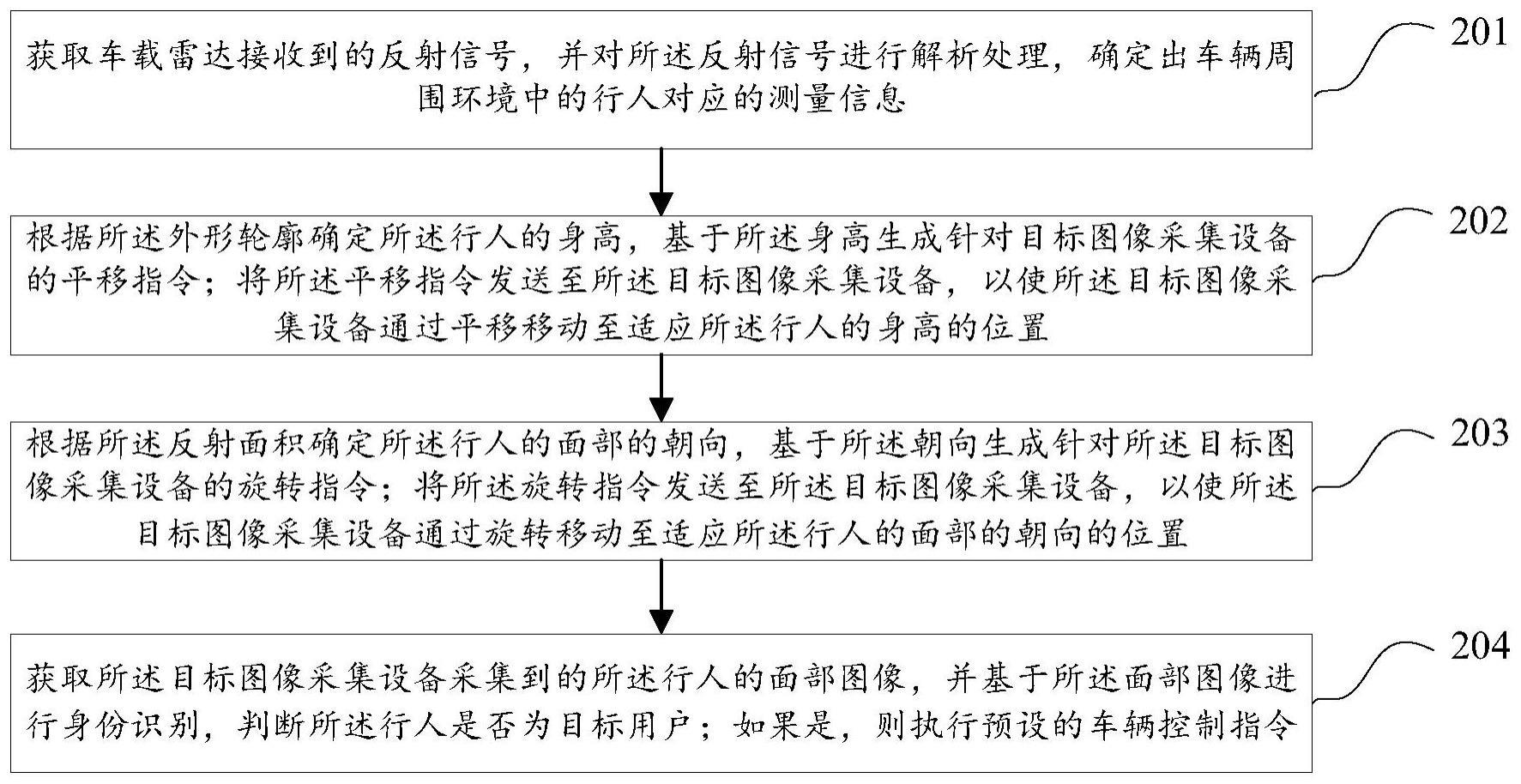
9、获取车载雷达接收到的反射信号,并对所述反射信号进行解析处理,确定出车辆周围环境中的行人对应的测量信息;其中,所述反射信号由车辆周围环境中的障碍物反射雷达信号产生;所述测量信息至少包括所述行人的外形轮廓,以及反射面积;
10、根据所述外形轮廓确定所述行人的身高,基于所述身高生成针对目标图像采集设备的平移指令;将所述平移指令发送至所述目标图像采集设备,以使所述目标图像采集设备通过平移移动至适应所述行人的身高的位置;
11、根据所述反射面积确定所述行人的面部的朝向,基于所述朝向生成针对所述目标图像采集设备的旋转指令;将所述旋转指令发送至所述目标图像采集设备,以使所述目标图像采集设备通过旋转移动至适应所述行人的面部的朝向的位置;
12、获取所述目标图像采集设备采集到的所述行人的面部图像,并基于所述面部图像进行身份识别,判断所述行人是否为目标用户;如果是,则执行预设的车辆控制指令。
13、根据本说明书实施例的第四方面,提供一种身份识别系统,应用于车辆,所述系统包括:
14、至少一个自适应移动的图像采集设备,用于追踪车辆周围环境中的行人,并采集所述行人的面部图像;
15、车载雷达,用于接收反射信号,所述反射信号由车辆周围环境中的障碍物反射雷达信号产生;
16、车辆的处理器,用于:
17、对所述反射信号进行解析处理,确定出车辆周围环境中的行人对应的测量信息;所述测量信息至少包括所述行人的外形轮廓,以及反射面积;
18、根据所述外形轮廓确定所述行人的身高,基于所述身高生成针对目标图像采集设备的平移指令;将所述平移指令发送至所述目标图像采集设备,以使所述目标图像采集设备通过平移移动至适应所述行人的身高的位置;
19、根据所述反射面积确定所述行人的面部的朝向,基于所述朝向生成针对所述目标图像采集设备的旋转指令;将所述旋转指令发送至所述目标图像采集设备,以使所述目标图像采集设备通过旋转移动至适应所述行人的面部的朝向的位置;
20、获取所述目标图像采集设备采集到的所述行人的面部图像,并基于所述面部图像进行身份识别,判断所述行人是否为目标用户;如果是,则执行预设的车辆控制指令。
21、根据本说明书实施例的第五方面,提供一种身份识别装置,应用于车辆,所述车辆搭载了至少一个自适应移动的图像采集设备,所述装置包括:
22、解析模块,获取车载雷达接收到的反射信号,并对所述反射信号进行解析处理,确定出车辆周围环境中的行人对应的测量信息;其中,所述反射信号由车辆周围环境中的障碍物反射雷达信号产生;所述测量信息至少包括所述行人的外形轮廓,以及反射面积;
23、平移指令生成模块,根据所述外形轮廓确定所述行人的身高,基于所述身高生成针对目标图像采集设备的平移指令;将所述平移指令发送至所述目标图像采集设备,以使所述目标图像采集设备通过平移移动至适应所述行人的身高的位置;
24、旋转指令生成模块,根据所述反射面积确定所述行人的面部的朝向,基于所述朝向生成针对所述目标图像采集设备的旋转指令;将所述旋转指令发送至所述目标图像采集设备,以使所述目标图像采集设备通过旋转移动至适应所述行人的面部的朝向的位置;
25、身份识别模块,获取所述目标图像采集设备采集到的所述行人的面部图像,并基于所述面部图像进行身份识别,判断所述行人是否为目标用户;如果是,则执行预设的车辆控制指令。
26、根据本说明书实施例的第六方面,提供一种电子设备,包括通信接口、处理器、存储器和总线,所述通信接口、所述处理器和所述存储器之间通过总线相互连接;
27、所述存储器中存储机器可读指令,所述处理器通过调用所述机器可读指令,执行上述方法。
28、根据本说明书实施例的第七方面,提供一种机器可读存储介质,所述机器可读存储介质存储有机器可读指令,所述机器可读指令在被处理器调用和执行时,实现上述方法。
29、本说明书的实施例提供的技术方案可以包括以下有益效果:
30、通过以上技术方案,通过接收车载雷达确定出的测量信息,来生成针对自适应移动的图像采集设备的平移指令和旋转指令,图像采集设备接收到指令后,基于指令来对机构进行控制,并通过齿轮传动实现移动,调整图像采集设备的位置,使得图像采集设备在采集行人的图像时,可以与行人的身高和朝向相匹配。在上述过程中,通过基于车载雷达与自适应移动的图像采集设备相结合,可以根据行人对应的测量信息生成图像采集设备的移动指令,使得图像采集设备可以适应行人的身高和朝向,提高身份识别时的准确率,并且无需行人调整姿势来适应图像采集设备的位置,提高了用户体验。
- 还没有人留言评论。精彩留言会获得点赞!