一种基于质量估计的分层式纵向控制方法
本发明涉及无人运输领域,更具体地,涉及一种基于质量估计的分层式纵向控制方法。
背景技术:
1、现有的无人运输车辆的速度控制往往是需要估计无人运输车辆的质量,因为在对无人运输车辆的控制方法中首要的就是进行车辆的质量估计,现有的质量估计方法面向商用车,将其视为基于多种传感器数据来源的回归问题,但是由于现行技术中存在精度误差以及自动驾驶货车总质量变化大。因此在后续进行速度控制的时候就难以实现预期的加速度或者减速度。
2、进一步的,。车辆的纵向控制需要在特定工况下,通过采用不同的油门开度进行加速以及不同的制动主缸压力进行制动。然而,运输车辆由于装载货物而导致车辆总质量发生较大变化。在通常采用的恒定质量标定方案下,本身所设定的油门开度和主缸压力往往无法实现预期的加速度或减速度,再加上质量估计存在的误差,最终导致输出的加速度或减速度与预期相距太远。
技术实现思路
1、本发明为克服上述现有技术中的问题,提供一种基于质量估计的分层式纵向控制方法,针对质量具有梯度变化的运输车,以质量集合作为输出并选取当时车辆最相近质量的标定表,提高对加速度和减速度的控制精度。
2、为解决上述技术问题,本发明采用的技术方案是:一种基于质量估计的分层式纵向控制方法,具体包括以下步骤:
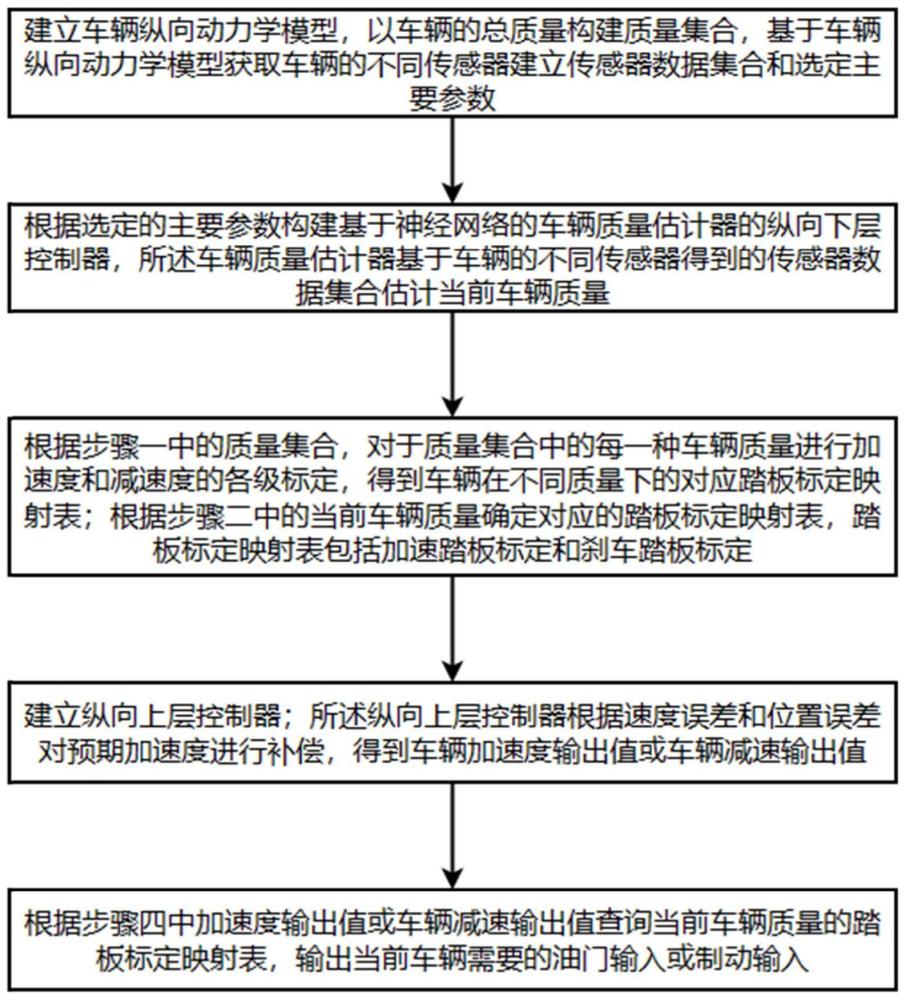
3、步骤一:建立车辆纵向动力学模型,以车辆的总质量构建质量集合,基于车辆纵向动力学模型获取车辆的不同传感器建立传感器数据集合和选定主要参数;
4、步骤二:构建基于神经网络的车辆质量估计器的纵向下层控制器,所述车辆质量估计器基于车辆的不同传感器得到的传感器数据集合估计当前车辆质量;
5、步骤三:根据步骤一中的质量集合,对于质量集合中的每一种车辆质量进行加速度和减速度的各级标定,得到车辆在不同质量下的对应踏板标定映射表;根据步骤二中的当前车辆质量确定对应的踏板标定映射表,踏板标定映射表包括加速踏板标定和刹车踏板标定。
6、步骤四:建立纵向上层控制器;所述纵向上层控制器根据速度误差和位置误差对预期加速度进行补偿,得到车辆加速度输出值或车辆减速输出值;
7、步骤五:根据步骤四中加速度输出值或车辆减速输出值查询当前车辆质量的踏板标定映射表,输出当前车辆需要的油门输入或制动输入。
8、在上述的技术方案中,针对的是货物单一且质量变化具有一定梯度轨道梁的运输车辆,因此随着货物的数量变化,车辆的总质量呈梯度增减,而车辆的可承载货物的数量是有限的,故质量集合中的数据有限。无人运输车辆本身就安装有多个不同的传感器用于采集车辆的数据,这些数据组成传感器数据集合,而主要参数的选定可在传感器数据集合中进行选择。通过车辆纵向动力学模型和依据传感器数据集合和质量集合构建基于神经网络的车辆质量估计器对汽车质量进行估计,而由于汽车质量的范围在质量集合内,让车辆质量的估计结果更加准确。而基于质量集合的数据有限性,可以对每个车辆质量都指定对应的踏板标定映射表,在踏板标定映射表中可以根据加速度或减速度找到对应的踏板开度。同时,通过在步骤四中对不同的车辆质量均能够输出对应准确的车辆加速度输出值或车辆减速输出值,该准确是相对更准确,作为用于查询的条件,条件本身越准确,查询得到的结果也会更准确,按照更为准确的加速度和减速度查询踏板标定映射表,就能够找到对应的踏板开度,最终通过踏板开度来让无人运输车辆达到预期的加速度或者减速度。
9、优选的,在步骤一中,车辆的总质量为车辆自身质量加上货物质量,其中单个货物的质量相同,质量集合为[m,m+m*1,m+m*2,…,m+m*n],其中,m为车辆自身质量;m为单个货物的质量,n为货物的数量。
10、优选的,在步骤一中,车辆纵向动力学模型具体为:
11、
12、式中,ttq是驱动转矩,ig是变速器传动比,io是主减速器传动比,ηt是传动链机械效率,r是车轮滚动半径,cd是空气阻力系数,af是迎风面积,ρ是空气密度,vx是车辆速度,m是车辆质量,g0是重力加速度,α是坡角,f是滚动阻力系数,ax是车辆加速度;δ是旋转质量转换系数;
13、传感器数据集合中包括车辆速度、车辆加速度、驱动转矩和变速器传动比;
14、环境参数包括空气阻力系数、空气密度、滚动阻力系数、坡角;环境参数预先完成预定;
15、主要参数在传感器数据集合和环境参数中进行选定。
16、优选的,在所述步骤一中,通过斯皮尔曼相关系数求解得到与传感器数据集合和环境参数中与质量的相关性矩阵对不相关的参数进行预筛选后得到主要参数。
17、优选的,在步骤四中,具体流程为:
18、s4.1:将车辆的期望位置和车辆实际位置相减,得到位置偏差;将所述位置偏差输入位置误差控制器后得到位置误差补偿量;
19、s4.2:将车辆的期望速度和车辆实际速度相减,得到速度误差;
20、s4.3:将速度误差和位置误差补偿量输入至速度控制器后得到误差加速度补偿量;
21、s4.4:将误差加速度补偿量与期望加速度相加,得到车辆加速度输出值。
22、优选的,踏板标定映射表中分别对加速踏板和刹车踏板进行标定,对车辆总质量为m+m*n的加速踏板标定映射的流程为:将车辆的起始速度设为0,将加速踏板的开度初始化为0,以设定的加速间隔递增加速踏板的开度,记录在加速踏板不同开度和速度下的加速度,得到车辆在不同加速踏板开度下,速度、加速度、加速踏板开度三者之间的映射数据;对车辆总质量为m+m*n的刹车踏板标定映射的流程为:将车辆的起始速度设为预设值,初始化制动踏板的开度为0,以设定的制动间隔递增刹车踏板的开度,记录在刹车踏板不同开度和速度下的加速度,得到车辆在不同刹车踏板开度下,速度、加速度和刹车踏板开度三者之间的映射数据。
23、优选的,构建基于神经网络的车辆质量估计器的纵向下层控制器的具体流程为:
24、获取车辆在不同质量下行驶工况中,传感器所采集得到的传感器数据集以及车辆参数;
25、在传感器数据集以及车辆参数中选定主要参数作为多分类神经网络的输入特征at;
26、以车辆的总质量构建质量集合作为输出,训练多分类神经网络来挖掘传感器数据中的时序特性;
27、训练完成的多分类神经网络作为车辆质量估计器。
28、优选的,构建基于神经网络的车辆质量估计器的纵向下层控制器的具体流程为:
29、获取车辆在不同质量下行驶工况中,传感器所采集得到的传感器数据集以及车辆参数;
30、以质量集合中某一车辆质量为输出,搭建多分类神经网络,以主要参数为变量,输出质量类别为因变量,以rmse均方根误差作为评价指标,训练得到该基于回归神经网络的车辆质量估计模型;
31、车辆质量估计模型为车辆质量估计器。
32、车辆质量估计模型具体为:
33、
34、其中,d表示估计质量与质量集合第i个质量的差值,m估计表示估计质量,mi表示质量结合中第i个预设质量;
35、通过最小化差值d来找到在质量集合中最贴近当前车辆质量的估计质量。
36、一种存储介质,存储有计算机程序,当所述计算机程序被处理器读取并运行时,实现上述的一种基于质量估计的分层式纵向控制方法。
37、一种汽车,包括制动系统,所述制动系统进行再生制动时,按照上述的一种基于质量估计的分层式纵向控制方法执行。
38、与现有技术相比,本发明的有益效果是:本方法适用于货物种类单一且质量变化具有梯度规律的运输车辆的纵向控制,控制分为两层,其中一层是对车辆质量进行估计和建立踏板标定映射表,另一层是对预期的加速度或减速度进行补偿,根据补充后的加速度或减速度以及估计得到的车辆质量,在踏板标定映射表中找到对应质量和加速度/减速度对应的加速踏板/刹车踏板开度,由于质量呈梯度变化,质量估计更加准确,而加速度和减速度经过补偿后也跟符合实际预期输出,最终再结合两者来动态选择踏板标定表中的踏板输出,使得无人运输车实际的加速度或减速度更能达到预期值。
- 还没有人留言评论。精彩留言会获得点赞!