一种无人机转运车及转运方法与流程
本发明属于舰载无人机舰船航空保障领域,具体涉及一种无人机转运车及转运方法。
背景技术:
1、目前,无人直升机、固定翼无人机、复合式无人机等各类无人机在军事和民用领域得到广泛应用。无人机通常需要在地面或舰船甲板上进行转运,传统的转运方法为机务人员开牵引车对无人机进行牵引转运,但此过程机务人员需要手动驾驶牵引车将无人机从一个位置牵引到另一个位置,耗费大量时间和人力物力,效率低下,且机务人员需要接触到无人机,容易受到无人机的振动和发动机噪音的影响,同时也存在被无人机撞击的风险。此外现有的牵引车只绑定无人机前轮进行牵引,在实际转运过程中,受场地空间限制,需要准确转运至起飞位往往需要多次调整,尤其在舰船甲板上转运时,由于甲板空间非常有限,无人机的转运灵活性较差,导致了转运耗时长、转运效率低下。
2、目前针对无人机自主转运方法的研究取得了一定进展,即无人机在地面状态下启动并且发动机处于慢车,遥控无人机地面转运或者飞控按照预设路径自动转运,但此方法技术难度大,且对发动机损坏极大,对无人机飞行寿命有严重影响,成本高昂。
技术实现思路
1、为解决上述技术问题,本发明提供一种无人机转运车,实现无人机在舰船甲板上、机库等室内环境下的自主转运。
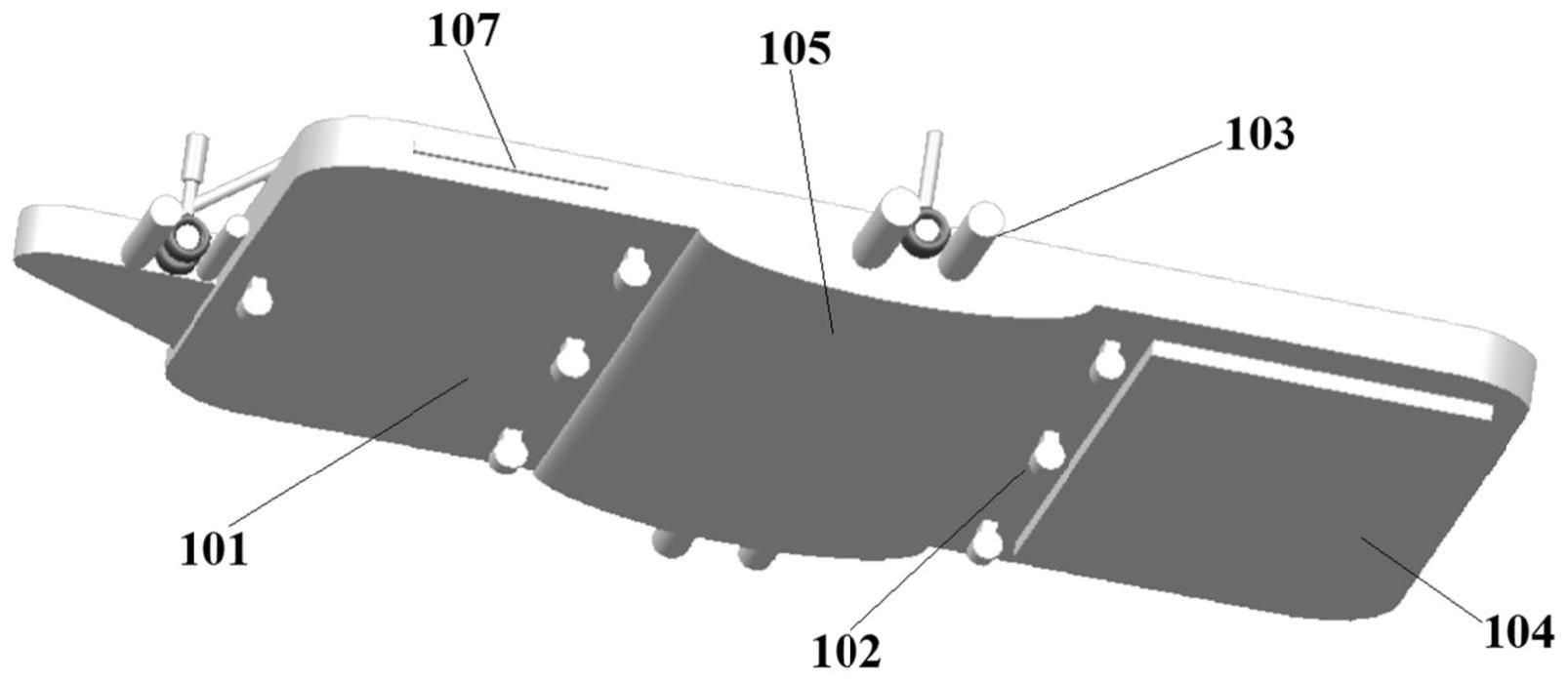
2、本发明的目的是通过以下技术方案实现的,一种无人机转运车,包括车架、转向舵轮、夹持机构、能源电池、电动机、无线通讯模块和控制器。
3、其中,车架为转运车的主体骨架结构,车架上表面用于承载无人机机轮。
4、多排转向舵轮设置在车架下表面,用于进行转向控制。
5、多个夹持机构均匀分布在车架侧边,用于固定夹持承载于车架上表面的无人机。
6、能源电池集成在车架上,用于为转运车供电。
7、电动机设置在车架下表面,与能源电池连接,在能源电池的电力供应下,驱动转向舵轮转动和前进。
8、无线通信模块设置在车架上,与电动机有线或无线连接,与控制器无线连接。
9、优选的,车架采用高强度钢材制成,其形状可根据各型无人机形状灵活调节。
10、优选的,夹持机构包括两根并排设置的夹棒,夹棒可在车架侧边上旋转并能在车架侧边上展开一定空隙。
11、优选的,能源电池可采用锂离子电池。
12、优选的,控制器可包括操作手柄、显示屏、连接线缆和电池。
13、优选的,转运车还包括自动驾驶仪,自动驾驶仪设置在车架上表面,通过无线通信模块与控制器进行数据传输,自动驾驶仪搭载自动导航系统实现自动驾驶和路径规划。
14、优选的,车架上设置有多种传感器,传感器与自动驾驶仪有线或无线连接,将采集到的环境信息传输给自动驾驶仪进行路径规划。
15、优选的,自动驾驶仪可采用卫星导航进行位置获取,还可以采用uwb定位技术、惯性导航和视觉定位的融合定位导航技术进行位置获取。
16、本发明除了提供一种无人机转运车外,还进一步提供一种使用上述无人机转运车对无人机进行转运的方法,具体步骤如下:
17、步骤1:操作员远程使用控制器控制无人机转运车移动到无人机下方,控制夹持机构夹持无人机;
18、步骤2:无人机夹持固定后,操作员通过控制器控制转向舵轮的方向和速度,控制夹持机构的夹持力度,将无人机转运到预定位置,操作员使用控制器控制夹持机构松开无人机,并控制转运车从无人机下方撤离,完成无人机的转运。
19、转运过程中,操作员可通过控制器实时观察转运车和无人机的状态,进行必要的调整和控制。
20、本发明还进一步提供一种采用上述无人机转运车对无人机进行自动转运的方法,具体步骤如下:
21、步骤1:无人机转运车通过自动驾驶仪控制转运车移动到无人机下方,并控制夹持机构夹持无人机;
22、步骤2:无人机夹持固定后,自动驾驶仪实时感知周围环境,规划路线,进行自主导航和避障,将无人机转运至预定位置,自动驾驶仪控制夹持机构松开无人机,并控制转运车从无人机下方撤离,完成无人机的自动转运。转运过程中,转运车的无线通信模块与控制器之间保持实时数据传输。
23、与现有技术相比,本发明具备以下优点:
24、本发明提供的一种无人机转运车及转运方法,提出了用于无人机转运的无人转运车结构,实现全自动转运,减少了机务人员的操作难度和工作量,提高了转运效率,自动化程度高。本发明提供的无人转运车可以通过北斗卫星导航、uwb定位、视觉定位、惯性导航等定位导航技术实现精确定位和避障,避免了机务人员直接接触无人机的风险,提高了转运的安全性。且由于整个转运过程不需要无人机启动,不会对无人机发动机和整体使用寿命造成影响。
25、本发明提供的无人转运车不需要对无人机进行改装,针对军用或者民用领域不同型号的无人直升机、固定翼无人机、复合式无人机,只需根据其前后轮安装位置及尺寸进行设计即可实现各类无人机的转运,使用范围广泛。
26、本发明中的转运车结构可根据实际需要进行定制和扩展,例如增加载重量、增加转运距离等,以满足不同场景下的转运需求。
技术特征:
1.一种无人机转运车,其特征在于:所述转运车包括车架(101)、转向舵轮(102)、夹持机构(103)、能源电池(104)、电动机(105)、无线通讯模块(107)和控制器;
2.如权利要求1所述的一种无人机转运车,其特征在于:所述车架(101)采用高强度钢材制成,其形状可根据各型所述无人机(201)的形状灵活调节。
3.如权利要求2所述的一种无人机转运车,其特征在于:所述夹持机构(103)包括两根并排设置的夹棒,夹棒可在所述车架(101)侧边上旋转并能在所述车架(101)侧边上展开一定空隙。
4.如权利要求3所述的一种无人机转运车,其特征在于:所述能源电池(104)可采用锂离子电池。
5.如权利要求4所述的一种无人机转运车,其特征在于:所述控制器可包括操作手柄、显示屏、连接线缆和电池。
6.如权利要求1所述的一种无人机转运车,其特征在于:所述转运车还包括自动驾驶仪(106),所述自动驾驶仪(106)设置在所述车架(101)上表面,通过所述无线通信模块(107)与所述控制器进行数据传输,所述自动驾驶仪(106)搭载自动导航系统实现自动驾驶和路径规划。
7.如权利要求6所述的一种无人机转运车,其特征在于:所述车架(101)上设置有多种传感器,传感器与所述自动驾驶仪(106)有线或无线连接,将采集到的环境信息传输给所述自动驾驶仪(106)进行路径规划。
8.如权利要求7所述的一种无人机转运车,其特征在于:所述自动驾驶仪(106)可采用卫星导航进行位置获取,还可以采用uwb定位技术、惯性导航和视觉定位的融合定位导航技术进行位置获取。
9.一种无人机的转运方法,其特征在于:采用权利要求1-5任一项所述的无人机转运车,对无人机进行转运,具体步骤如下:
10.一种无人机的转运方法,其特征在于:采用权利要求6-8任一项所述的无人机转运车,对无人机进行自动转运,具体步骤如下:
技术总结
本发明公开了一种无人机转运车及转运方法,无人机转运车包括车架、转向舵轮、夹持机构、能源电池、电动机、无线通讯模块和控制器,操作员可通过控制器远程控制无人机转运车行驶到无人机下方,并控制夹持机构对无人机进行夹持后完成转运。本发明提供的一种无人机转运车在配备自动控制仪时,可通过自动控制仪实现自动控制,实现无人机的自动转运。本发明中,转运车可根据不同型号的无人机进行定制设计,自动控制仪可根据使用场景采用不同的导航技术,提升了转运车的适用范围和转运效率。本发明提供的一种无人机转运车及转运方法,结构简单、控制方便、自动化程度和安全性高、能够满足不同场景下的转运需求。
技术研发人员:骈学超,董方晨,侯雪剑,李东宸,江坤,张萌,缪国春,张博勋,刘佳,黄智,张建强,许长彬,苏润丛,田佳旺,刘凯,刘恩昊,管子懿,白若雯,温利鑫,李嘉楠
受保护的技术使用者:中国船舶集团有限公司系统工程研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!