一种水陆空全能多栖机器人的制作方法
本发明涉及机器人,尤其涉及一种水陆空全能多栖机器人。
背景技术:
1、目前,在空中工作的机器人通常在陆地上会受到很大的限制,而在地面运动的机器人往往不能在空中运动,这是因为一般的机器人换了一种环境缺少相应结构来实现运动,即仅能在一种环境下的运动而不是实现复杂环境的工作。因此,如果机器人工作周围的环境是多栖环境交汇影响,而如果机器人不能适应环境进行工作状态切换,那么这些机器人往往不能满足人们在生产实践中的需要。而多栖机器人可以在一个单独环境下工作,也可以实现从一个工作环境到另一个或者多种环境的工作条件转移,机器人活动范围将会受到很大的提高,比单一运动空间机器人更具有优势,性能更突出,效率更高。因此,研究多栖机器人具有很大的意义。
2、经检索,中国专利申请号为cn202210708005.4的专利,公开了一种可爬壁的多栖机器人,包括支撑车架和倾转旋翼运动机构;所述支撑车架两侧的旋臂固定支架活动连接有所述倾转旋翼运动机构,但是上述技术方案中,当倾转旋翼运动机构带动前后驱动轮向下转动,让机器人从飞行模式转换到地面行走模式时,向下转动时的驱动轮会与地面之间产生较大摩擦,导致机器人整体在进行模式切换时容易产生较大晃动,因此还存在机器人在进行飞行模式和地面行走模式之间的切换时,自身容易产生较大晃动的问题。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种水陆空全能多栖机器人。
2、为了实现上述目的,本发明采用了如下技术方案:
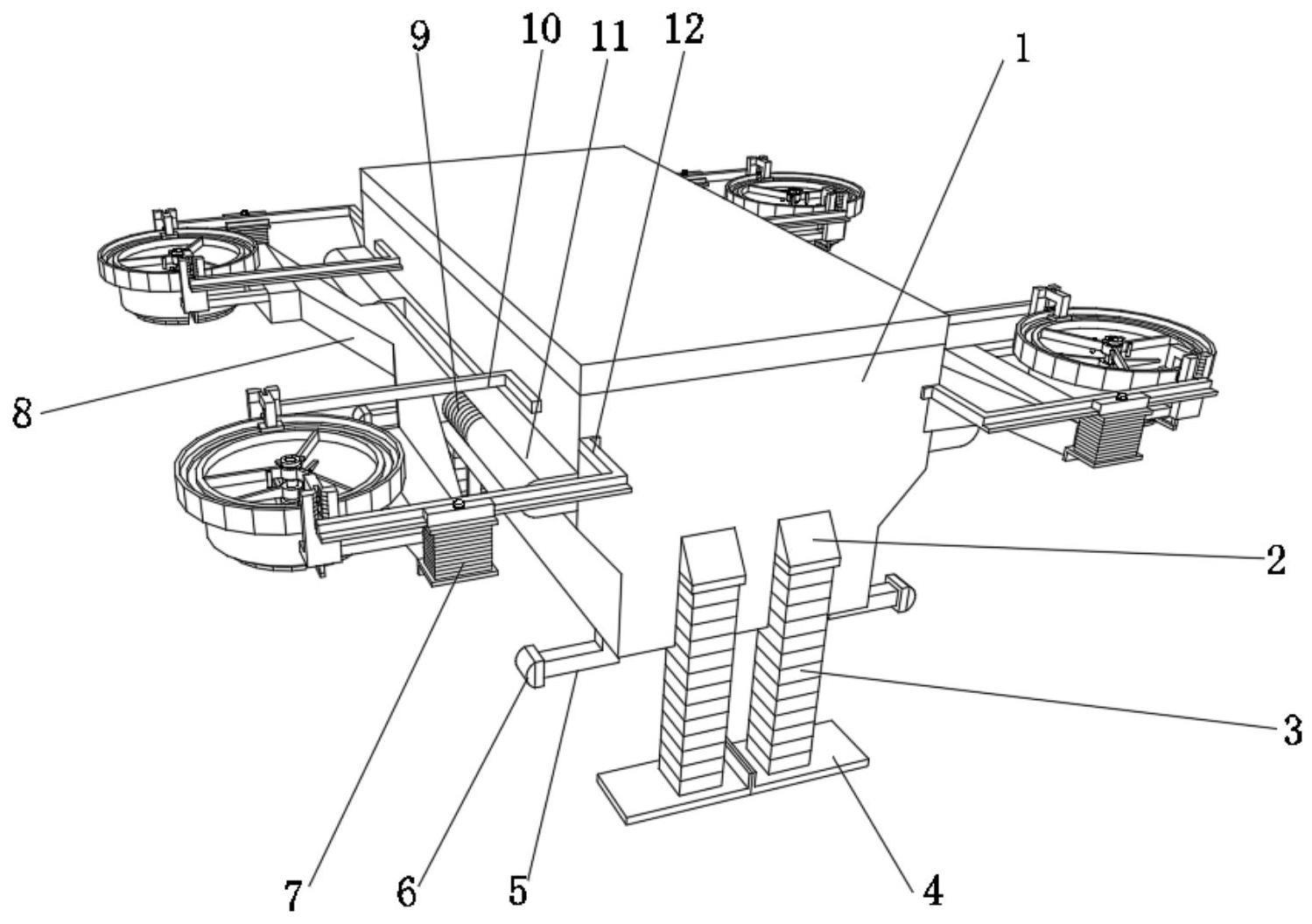
3、一种水陆空全能多栖机器人,包括机器人主体,所述机器人主体两侧外壁分别设置有连接座,连接座内壁设置有步进电机,步进电机的输出轴通过联轴器连接有连接架,连接架两侧外壁分别设置有一组支撑块,支撑块一侧外壁设置有第一导向块和第二导向块,机器人主体两侧外壁分别开有一组矩形槽,矩形槽顶部内壁固定有连接块,连接块底部外壁设置有第一弹性气囊,第一弹性气囊底部外壁设置有支撑板,机器人主体两侧外壁分别设置有一组第二限位杆,第二限位杆外壁设置有安装块,连接架两侧外壁分别固定有活动片,活动片和安装块相对一侧外壁设置有第二弹性气囊,安装块和连接块一侧外壁分别设置有气阀。
4、优选的:所述第一导向块和第二导向块一侧外壁设置有地面行走机构,支撑块内壁设置有飞行机构,机器人主体内壁设置有控制面板,步进电机与控制面板电性连接。
5、进一步的:所述飞行机构包括导向套、安装架、无刷电机、螺旋桨和转轴,导向套设置于支撑块的一侧内壁上,安装架滑动连接于导向套的内壁上,无刷电机固定于安装架的一侧外壁上,转轴通过联轴器连接于无刷电机的输出轴上,螺旋桨设置于转轴的外壁上,无刷电机与控制面板电性连接。
6、进一步优选的:所述地面行走机构包括导向环、轮胎、加强杆、推杆、连接轴承、l型杆和弧形弹块,导向环滑动连接于第二导向块和第一导向块的一侧外壁上,轮胎设置于导向环的外壁上,加强杆固定于导向环的内壁上,连接轴承固定于加强杆的一侧外壁上,推杆固定于加强杆的外壁上,l型杆分别固定于机器人主体的两侧外壁上,弧形弹块固定于l型杆的一侧外壁上。
7、作为本发明一种优选的:所述安装架一侧外壁固定有一组l型板,l型板一侧外壁设置有摩擦垫,l型板一侧外壁固定有第二磁铁块,第一导向块底部外壁设置有第一磁铁块。
8、作为本发明进一步优选的:所述第二导向块一侧外壁固定有导气罩,导气罩外壁滑动连接于导向环的内壁上,导气罩两侧外壁分别开有预留槽。
9、作为本发明再进一步的方案:所述机器人主体两侧内壁分别开有导向槽,导向槽内壁滑动连接有导向板,导向板一侧外壁固定于支撑板的一侧外壁上。
10、在前述方案的基础上:所述机器人主体两侧外壁分别固定有一组第一限位杆,第一限位杆和第二限位杆相对一侧外壁分别固定有限位圆杆,第一导向块一侧外壁开有卡槽,限位圆杆滑动连接于卡槽的内壁上,限位圆杆的直径小于卡槽的宽度。
11、在前述方案的基础上优选的:所述转轴滑动连接于连接轴承的内壁上,转轴一侧外壁设置有第二连接头,第二连接头一侧外壁设置有第一连接头,第一连接头一侧外壁设置有推进式螺旋桨。
12、在前述方案的基础上进一步优选的:所述连接架底部外壁设置有第二步进电机,第二步进电机的输出轴设置有调节块,支撑块设置于调节块的底部外壁上,第二步进电机与控制面板电性连接;
13、所述机器人主体一侧外壁固定有固定块,固定块一侧外壁设置有第三弹性气囊和一组弹性夹板,弹性夹板一侧外壁开有矩形通槽,矩形通槽内壁设置有第四弹性气囊,第四弹性气囊一侧外壁设置有导气块,导气块外壁设置有电控气阀和通气管,通气管与第三弹性气囊相连接,导气块一侧外壁设置有电控气阀,第四弹性气囊一侧外壁设置有摩擦片,连接架一侧外壁设置有插板,插板插接于弹性夹板的一侧外壁上,摩擦片与控制面板电性连接。
14、本发明的有益效果为:
15、1.通过设置第一弹性气囊和支撑板,第一弹性气囊可跟随相邻一侧的第二弹性气囊的膨胀和收缩进行收缩和膨胀,连接架向下转动时,与之相邻一侧的第一弹性气囊收缩,位于机器人主体底部的另一个第一弹性气囊会通过支撑板对机器人主体进行支撑,让机器人主体在其中一个地面行走机构向下转动时不会迅速发生位移,避免地面行走机构向下转动时与地面产生摩擦,由于向下转动后地面行走机构的长度低于另一侧膨胀时的第一弹性气囊的长度,此时机器人主体整体会向首先转下的地面行走机构一侧倾斜一定角度,随后控制面板控制另一个地面行走机构向下转动,让另一个第一弹性气囊收缩,当另一个地面行走机构向下转动到地面时,两个第一弹性气囊均全部收缩到机器人主体底部,让地面行走机构在不与地面发生较大摩擦的情况下,平稳的让机器人主体完成飞行和地面行走模式的切换,提高了多栖机器人在使用时的稳定性。
16、2.当支撑块向下转动到于地面垂直的角度后,无刷电机一侧的螺旋桨也会抵在连接轴承一侧,此时加强杆外壁的推杆会卡在螺旋桨一侧,从而让无刷电机带动螺旋桨转动时,螺旋桨能够通过推杆推动滑动连接在支撑块一侧的导向环转动,带动导向环外壁的轮胎转动,通过轮胎和地面之间的摩擦力带动机器人主体前后移动,当支撑块跟随连接架向上转动到与地面水平的位置后,安装架可通过自身重力向下滑动,从而带动螺旋桨远离加强杆,避免推杆对飞行模式下转动的螺旋桨造成阻挡。
17、3.位于l型板一侧的摩擦垫会通过自身摩擦力帮助l型板卡在轮胎一侧,避免轮胎在飞行模式下发生转动,同时摩擦垫可通过与轮胎外壁之间的摩擦力对安装架整体进行限位,避免安装架在无刷电机带动螺旋桨转动时上下晃动,提高了飞行机构运行时的稳定性,当安装架在l型杆和弧形弹块的挤压下抵在连接轴承一侧后,位于安装架一侧的第二磁铁块也会抵在第一导向块底部的第一磁铁块上,通过自身磁力帮助l型板吸附在第一导向块底部,提高飞行机构在带动地面行走机构运行时整体的稳定性。
18、4.当支撑块跟随连接架向上转动到与地面平行的位置后,第二限位杆和第一限位杆一侧的限位圆杆也会插入卡槽内,从而穿过卡槽压在l型板上,配合抵在轮胎外壁的摩擦垫对安装架整体进行限位,进一步提高安装架整体在飞行机构运行时的稳定性。
19、5.工作人员只需在机器人主体两侧两个连接架的相同一侧,在连接架底部设置对应的第二步进电机和调节块,当机器人主体处于地面行走模式时,控制面板可通过控制两个第二步进电机同向转动一定角度,让机器人主体整体完成转弯动作,让机器人主体整体能够在行走模式下进行转弯,同时在水面上移动式,也可通过调整第二步进电机来对水面移动时的方向进行调整,提高了多栖机器人移动时的灵活性。
- 还没有人留言评论。精彩留言会获得点赞!