车辆用前方识别装置以及车辆控制单元的制作方法
本发明涉及一种车辆用前方识别装置以及车辆控制单元,该车辆用前方识别装置通过人工智能对拍摄到的本车辆前方的行驶环境的图像进行图像解析。
背景技术:
1、在自动驾驶系统中,人工智能(ai:artificial intelligence)代替驾驶员控制在特定自动驾驶区域的驾驶。此时,根据从以gps卫星为代表的gnss(global navigationsatellite system:全球导航卫星系统)卫星的定位卫星接收到的位置信息,通过与存储在地图服务器中的高精度地图信息(动态地图)的匹配来估计本车辆的当前位置(本车辆位置)。
2、该高精度地图信息形成层结构,以最底层的静态信息层为基础,在其上重叠支持自动驾驶所需的附加地图信息。静态信息层中,存储有变化较少的高精度三维地图信息(路面信息、车道信息、建筑物的位置信息等)。
3、附加地图信息被划分为3层,从下位层开始依次具有准静态信息、准动态信息、动态信息的各个层。根据时间轴上的变化(变动)程度划分各个层。其中,动态信息层中,对象物的识别(周边车辆、自行车、人物等)以及对象物的位置信息等实时变化的信息,例如以1[sec]1次以上的次数进行更新。
4、但是,现状的高精度地图信息中没有设定动态信息层。因此,自动驾驶系统从人工智能(ai)对车载照相机拍摄到的本车辆前方的实时图像进行解析推论而得到的结果中取得动态信息。例如,在专利文献1(国际公开第2020/110915号公报)中公开了一种技术,其在使用ai识别作为动态信息的移动体时,使用语义分割(セマンティックセグメンテーション),基于实际的移动体的形状或其他特征信息,基于移动体识别用的词典数据(已学习数据)与图像内的移动体的一致度,识别图像的各个构成像素(图素)是属于车辆、人物等哪个种类(类别)的像素。
5、现有技术文献
6、专利文献
7、专利文献1:国际公开第2020/110915号公报
技术实现思路
1、发明所要解决的课题
2、但是,在基于使用语义分割等的ai的图像解析的对象物识别中,车辆、自行车、人物等预先确定形状的对象物的学习数据积累较多,可以通过高精度的推论进行识别。但是,对于学习数据积累少的对象物,推论精度低,很难准确识别。
3、当ai基于少量积累的学习数据将道路上的对象物识别为固体障碍物时,即使该对象物实际上是垃圾袋或帽子,自动驾驶系统也会执行转向等回避控制。但是,在驾驶员识别对象物为垃圾袋或帽子的状态下,自动驾驶系统对本车辆进行回避控制时,由于执行了违背驾驶员意愿的控制,会使该驾驶员产生不适感。
4、本发明目的在于提供一种车辆用前方识别装置,针对形状难以确定且学习数据难以积累的对象物,即使不学习,也不会执行基于ai的错误推论进行的控制,从而能够提前防止违背驾驶员意愿的控制动作。
5、解决课题的手段
6、本发明的车辆用前方识别装置,具备:拍摄本车辆前方的行驶环境的摄像部;通过人工智能解析由所述摄像部拍摄到的所述行驶环境的图像、按照所属类别分割图像区域的图像解析部;以及取得所述本车辆前方的高精度地图信息的道路信息取得部,所述车辆用前方识别装置从由所述图像解析部解析的所述类别中取得无法从由所述道路信息取得部取得的所述高精度地图信息中取得的动态信息,其中,所述图像解析部具有不适感区域分割部,所述不适感区域分割部从所述行驶环境的图像中分割出不属于任何所述类别的道路上的所述图像区域作为不适感区域,所述车辆用前方识别装置还具有:不适感区域验证部,其用于验证本车辆是否能够通过由所述不适感区域分割部分割出的所述不适感区域;以及告知部,当由所述不适感区域验证部判定为所述本车辆不能通过所述不适感区域时,告知驾驶员。
7、发明效果
8、根据本发明,通过人工智能解析由摄像部拍摄到的行驶环境的图像,在按所属类别分割图像区域时,从行驶环境的图像中分割出不属于任何类别的道路上的图像区域作为不适感区域,验证本车辆是否能够通过该不适感区域,在判定为不能通过时,告知驾驶员,因此将形状难以确定且学习数据难以积累的对象物作为不适感区域,即使不学习,也不会执行基于ai的错误推论进行的控制。其结果,能够提前防止违背驾驶员意愿的控制动作。
技术特征:
1.一种车辆用前方识别装置,包括:
2.根据权利要求1所述的车辆用前方识别装置,其特征在于,所述不适感区域验证部将由所述图像解析部按照类别分割的所述图像区域的所述动态信息以外的图像区域和由所述道路信息取得部取得的所述高精度地图信息进行对照,提取所述不适感区域。
3.根据权利要求1所述的车辆用前方识别装置,其特征在于,在所述不适感区域的区域面积为规定判定面积以上的情况下,所述不适感区域验证部判定为所述本车辆不能通过所述不适感区域。
4.根据权利要求3所述的车辆用前方识别装置,其特征在于,所述判定面积是所述本车辆不与所述不适感区域接触而能够使左右车轮间的车身下方通过的值,所述区域面积由所述不适感区域的实际最大横向宽度和实际最大离地高度设定。
5.一种车辆控制单元,包括:
技术总结
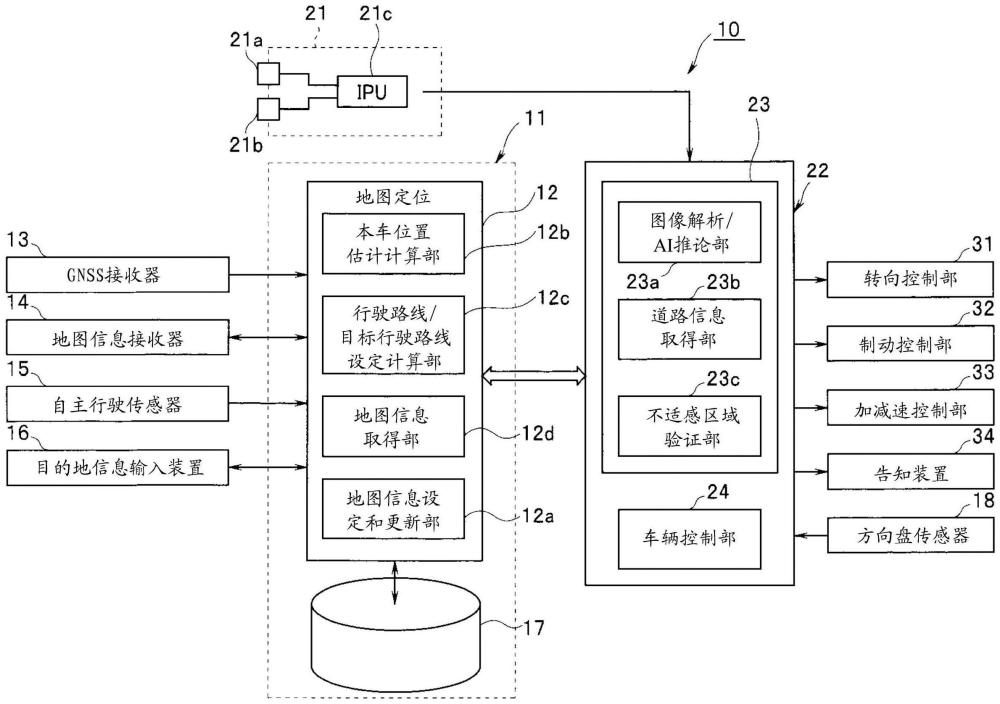
本申请涉及车辆用前方识别装置以及车辆控制单元,旨在针对形状难以确定且学习数据难以积累的对象物,即使不学习,也能够防止执行基于AI的错误推论进行的控制。前方识别部(23)具备图像解析/AI推论部(23a)、道路信息取得部(23b)和不适感区域验证部(23c),图像解析/AI推论部(23a)通过人工智能解析本车辆(M)前方的行驶环境的图像,按照所属类别分割图像区域,将不属于任何类别的道路上的图像区域分割为不适感区域。道路信息取得部(23b)取得本车辆(M)前方的高精度地图信息。不适感区域验证部(23c)验证本车辆(M)是否能够通过分割出的不适感区域,当判定为不能通过时告知驾驶员。
技术研发人员:间庭宏贵,原田玲央,仓持拓明,佐藤圣也,向井成树,高桥和志,宗村亘
受保护的技术使用者:株式会社斯巴鲁
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!