一种自动驾驶车辆接管方法、装置及车辆与流程
本发明属于车辆接管,具体涉及一种自动驾驶车辆接管方法、装置及车辆。
背景技术:
1、从自动驾驶l3级到真正意义上的实现完全自动驾驶之前,要求驾驶员在任何时候都有能力接管对整车的控制,而驾驶员手握方向盘就是其能控制整车的指示信号。当检测到驾驶员将手接触方向盘,则意味着驾驶员意图从adas系统中重新取回对整车的控制。将手放回方向盘可以是指示驾驶员重新控制车辆的一种确认方式,但怎样判断驾驶员对方向盘进行了接管,是目前汽车行业重要的研究方向之一。比如通过扭矩传感器的方式、压力传感器的方式以及视觉摄像头的判断方式,这些虽然都能检测驾驶员对方向盘接管,但是准确率低。例如驾驶员手空心握着方向盘,没有触碰到方向盘,电容方向盘就无法识别;亦如驾驶员手握着方向盘,但没有对方向盘施加扭力,扭矩传感器则无法识别;再如驾驶员用其它物品替代手握方向盘(如用个物品挂在方向盘上或者驾驶员肚子比较大触碰到方向盘),则自动驾驶系统会误识别。
2、因此,如何准确判断并识别驾驶员的真实接管意图显得尤为重要。
技术实现思路
1、本发明的目的在于,提供一种自动驾驶车辆接管方法、装置及车辆,解决无法准确判断并识别驾驶员的真实接管意图的问题。
2、本发明的技术方案如下:
3、一种自动驾驶车辆接管方法,包括以下步骤:
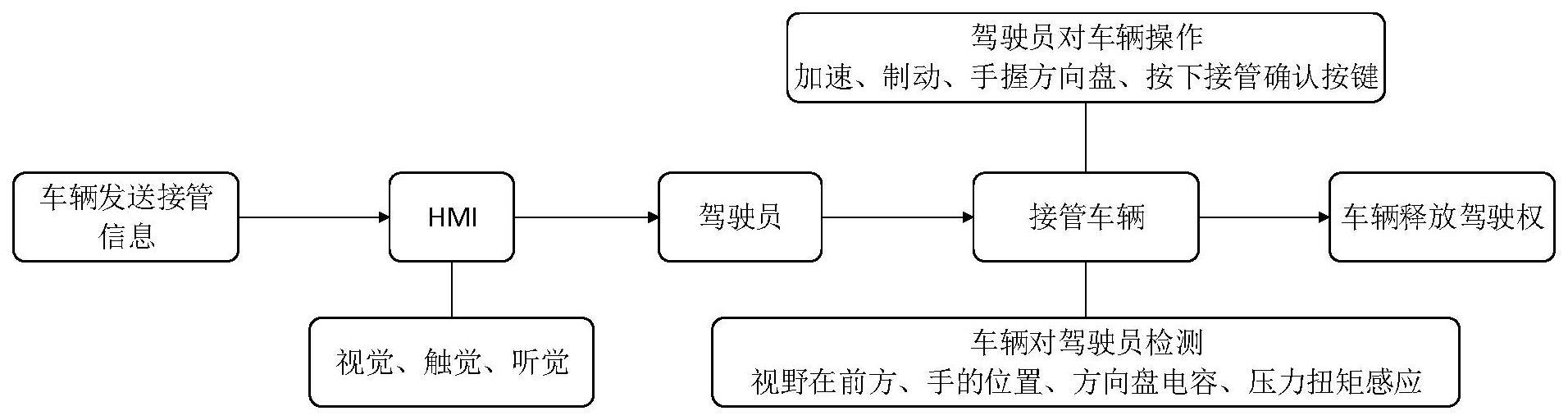
4、检测车辆接管条件是否满足;所述车辆接管条件包括驾驶员眼睛面向前方、驾驶员手握方向盘以及驾驶员对车辆进行接管确认;
5、其中:通过摄像头对驾驶员的视线进行识别,以判断驾驶员眼睛是否面向前方;当驾驶员的视线朝向车辆行驶方向,则认为驾驶员眼睛面向前方;
6、通过多种方式判断驾驶员是否手握方向盘,包括:方向盘电容传感器识别方式、方向盘扭矩传感器识别方式以及摄像头视觉识别方式;只要有一种方式成功识别到驾驶员手握方向盘,则认为驾驶员手握方向盘;
7、通过触发接管确认开关或语音指令的方式判断驾驶员是否对车辆进行接管确认;
8、当所述车辆接管条件全部满足,即驾驶员眼睛面向前方、手握方向盘且对车辆进行接管确认,则车辆确认驾驶员接管,并释放驾驶权。
9、进一步的,当自动驾驶车辆超出运行设计域或自动驾驶系统出现故障时,车辆向驾驶员发送接管请求信号,并检测车辆接管条件是否满足。
10、进一步的,车辆通过mhi向驾驶员发送接管请求信号,所述信号为视觉信号、听觉信号和触觉信号中的至少一种。
11、进一步的,车辆接管条件还包括加速或制动;当油门踏板或制动踏板发生位移,则认为这一条件满足。
12、进一步的,当驾驶员的视线方向与车辆行驶方向的夹角不超过预设角度阈值时,认为驾驶员的视线朝向车辆行驶方向;否则认为驾驶员的视线未朝向车辆行驶方向。
13、进一步的,间隔判断驾驶员的视线是否朝向车辆行驶方向,若至少连续两次检测到驾驶员的视线朝向车辆行驶方向,则认为驾驶员眼睛面向前方。
14、进一步的,方向盘电容传感器识别方式为:检测握力,并与预设握力阈值进行比较,当握力超过预设握力阈值,则认为成功识别到驾驶员手握方向盘;
15、方向盘扭矩传感器识别方式为:检测方向盘扭矩,并与预设扭矩阈值进行比较,当方向盘扭矩超过预设扭矩阈值,则认为成功识别到驾驶员手握方向盘;
16、摄像头视觉识别方式为:摄像头通过视觉方式来识别驾驶员是否手握方向盘。
17、进一步的,接管确认开关为触摸屏上的虚拟控制开关或车内的物理接管确认按键;
18、语音指令的方式为:驾驶员通过语音方式对车辆进行接管确认。
19、一种用于实现上述中任意一项所述的自动驾驶车辆接管方法的自动驾驶车辆接管装置,包括:
20、自动驾驶控制器,用于向ivi发送接管请求;
21、ivi,用于接收自动驾驶控制器发送的接管请求并向驾驶员发送接管请求信号;
22、第一dms摄像头,用于判断驾驶员眼睛是否面向前方;
23、电容式方向盘,用于识别驾驶员是否手握方向盘;
24、方向盘扭矩传感器,用于识别驾驶员是否手握方向盘;
25、第二dms摄像头,用于识别驾驶员是否手握方向盘;
26、接管确认开关,用于通过物理接管确认按键判断驾驶员是否对车辆进行接管确认,或ivi通过触摸屏上的虚拟控制开关或语音识别方式判断驾驶员是否对车辆进行接管确认;
27、自动驾驶控制器还用于判断所述车辆接管条件是否全部满足,并在驾驶员眼睛面向前方、手握方向盘且对车辆进行接管确认后,确认驾驶员接管,并释放驾驶权。
28、一种车辆,该车辆采用上述中任意一项所述的自动驾驶车辆接管方法。
29、本发明与现有技术相比,具有以下优点及有益效果:
30、本发明通过多种方式判断驾驶员是否手握方向盘,包括方向盘电容传感器识别方式、方向盘扭矩传感器识别方式以及摄像头视觉识别方式,只要有一种方式成功识别到驾驶员手握方向盘,则认为驾驶员手握方向盘,提高了手握方向盘的识别准确率;同时,其结果与驾驶员眼睛面向前方以及驾驶员对车辆进行接管确认相结合,综合作为车辆接管判断条件,能够准确判断并识别驾驶员的真实接管意图,提高了驾驶员接管的识别判断准确率。
技术特征:
1.一种自动驾驶车辆接管方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的自动驾驶车辆接管方法,其特征在于,当自动驾驶车辆超出运行设计域或自动驾驶系统出现故障时,车辆向驾驶员发送接管请求信号,并检测车辆接管条件是否满足。
3.根据权利要求2所述的自动驾驶车辆接管方法,其特征在于,车辆通过mhi向驾驶员发送接管请求信号,所述信号为视觉信号、听觉信号和触觉信号中的至少一种。
4.根据权利要求1所述的自动驾驶车辆接管方法,其特征在于,车辆接管条件还包括加速或制动;当油门踏板或制动踏板发生位移,则认为这一条件满足。
5.根据权利要求1所述的自动驾驶车辆接管方法,其特征在于,当驾驶员的视线方向与车辆行驶方向的夹角不超过预设角度阈值时,认为驾驶员的视线朝向车辆行驶方向;否则认为驾驶员的视线未朝向车辆行驶方向。
6.根据权利要求1所述的自动驾驶车辆接管方法,其特征在于,间隔判断驾驶员的视线是否朝向车辆行驶方向,若至少连续两次检测到驾驶员的视线朝向车辆行驶方向,则认为驾驶员眼睛面向前方。
7.根据权利要求1所述的自动驾驶车辆接管方法,其特征在于,方向盘电容传感器识别方式为:检测握力,并与预设握力阈值进行比较,当握力超过预设握力阈值,则认为成功识别到驾驶员手握方向盘;
8.根据权利要求1所述的自动驾驶车辆接管方法,其特征在于,接管确认开关为触摸屏上的虚拟控制开关或车内的物理接管确认按键;
9.一种用于实现权利要求1至8中任意一项所述的自动驾驶车辆接管方法的自动驾驶车辆接管装置,其特征在于,包括:
10.一种车辆,其特征在于,该车辆采用权利要求1至8中任意一项所述的自动驾驶车辆接管方法。
技术总结
本发明公开了一种自动驾驶车辆接管方法、装置及车辆,该方法包括:检测车辆接管条件是否满足;车辆接管条件包括驾驶员眼睛面向前方、驾驶员手握方向盘以及驾驶员对车辆进行接管确认;其中:通过摄像头对驾驶员的视线进行识别,以判断驾驶员眼睛是否面向前方;通过多种方式判断驾驶员是否手握方向盘,包括:方向盘电容传感器识别方式、方向盘扭矩传感器识别方式以及摄像头视觉识别方式;只要有一种方式成功识别到驾驶员手握方向盘,则认为驾驶员手握方向盘;通过触发接管确认开关或语音指令的方式判断驾驶员是否对车辆进行接管确认;当车辆接管条件全部满足,则车辆确认驾驶员接管,并释放驾驶权。本发明提高了驾驶员接管的识别判断准确率。
技术研发人员:何班本,边宁,文翊,裴双红,吴庆国
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!