一种水陆两栖机器人及控制方法与流程
本发明涉及机器人,尤其涉及一种能够适应水下和陆地场景的机器人。
背景技术:
1、近来机器人领域技术蓬勃发展,市场也对机器人产品适用场景提出了更多的需求。其中,陆行机器人是发展最快、应用最广相对较为成熟的产品细分,可以代替人工执行巡逻、运输等多种任务。而水下机器人可以替代人工进行执行长时间或较为危险的水下任务。同时为应对综合任务的需求,水陆两栖机器人的需求也收到业内关注。
2、但现有技术中的水陆两栖机器人方案,陆行场景由轮、腿等方案实现,水下推进动作则由螺旋桨等方案实现。因为需要分别设计两套的动力装置,导致机器人整体结构繁复、控制复杂、成本高。
技术实现思路
1、本发明是为了克服现有技术中的水陆两栖机器人的上述不足之处,提供一种能够适应多场景需求的水陆两栖机器人。
2、为实现上述目的,本发明采用以下技术方案:
3、本发明申请的一种水陆两栖机器人,包括主机、主机浮体、可执行快步动作的腿部装置、桨轮装置;
4、所述主机,至少在主机上设有主机浮体;
5、所述腿部装置,设置在主机的两侧,包括可折叠伸展的第一腿部件和第二腿部件,所述第一腿部件可相对主机前后摆动,所述第二腿部件转动连接第一腿部件的末端并可相对第一腿部件前后摆动,所述第二腿部件的末端设有腿部浮体;
6、可转动的所述桨轮装置,设置在第二腿部件的末端,桨轮装置包括用于陆地行进的轮框、设置在轮框内侧的桨叶、用于控制桨轮装置朝向转向机构以及驱动轮框旋转的动力单元。
7、作为优选,所述动力单元为轮毂电机,所述轮毂电机和轮框通过呈辐射状布置的桨叶相连接。
8、作为优选,所述转向机构采用舵机,所述舵机设置在第二腿部件的末端,舵机的输出设有轮毂固定盘,所述轮毂电机通过轮毂固定盘连接舵机,所述轮毂电机的轴向与舵机的输出轴垂直;舵机的输出轴转动控制轮毂电机的轴向方向,使轮毂电机的轴向朝向第二腿部件末端的延伸方向或垂直第一腿部件、第二腿部件所在平面。
9、作为优选,所述主机形状为横置的圆柱体,主机内部设有电池、控制主板和感知元件,所述感知元件设置在主机的前部,电池设置在主机内部偏下的位置,使主机的重心位于主机的下半侧,所述腿部装置与主机的连接的所在平面位于主机重心的上方,所述主机浮体设置在主机的顶部。
10、作为优选,所述腿部装置包括第一腿部件、第二腿部件,所述摆动机构包括第一动力关节;所述伸展机构包括第二动力关节、第一连杆和第二连杆;
11、第一腿部件一端连接第一动力关节的输出端,第一腿部件的另一端铰接第二腿部件;
12、所述第二动力关节设置于第一腿部件上,第一连杆一端连接第二动力关节的输出端,另一端铰接第二连杆,第二连杆铰接第二腿部件;
13、第二腿部件一端连接桨轮装置,另一端铰接第二连杆,第二腿部件和第一腿部件的铰接点靠近第二腿部件和第二连杆的铰接点;
14、所述第一动力关节设置在主机侧方,用于驱动第一腿部件摆动;
15、第一连杆、第二连杆、第一腿部件和第二腿部件构成四连杆机构,所述四连杆机构用于调节第一腿部件和第二腿部件之间的开合角度。
16、作为优选,所述的第一动力关节、第二动力关节同轴设置在第一腿部件的两侧,第一腿部件为中空结构,第一连杆、第二连杆以及第二动力关节的输出轴均位于第一腿部件的内部。
17、作为优选,所述的主机正下方设置有辅助轮。
18、本申请同时提供一种水陆两栖机器人的控制方法,其特征是,所述方法用于控制水陆两栖机器人从陆行至水下运行,包括:
19、当所述机器人位于陆行场景中,轮框外侧接触地面,控制腿部装置支撑主机;桨轮装置朝向主机侧方;桨轮装置旋转时,通过轮框旋转驱动机器人行进,通过两侧桨轮装置差速控制机器人转向,并通过腿部装置和伸缩执行跨步动作;
20、当所述机器人位于水下前进场景中,腿部装置向主机后方伸展,桨轮装置朝向主机后方,桨轮装置旋转时,通过旋转桨叶驱动机器人行进,通过控制桨轮装置朝向或两侧桨轮装置差速控制机器人行进方向;
21、当所述机器人位于水中悬停场景中,第一腿部件和第二腿部件折叠,使桨轮装置贴近主机中部,同时控制桨轮装置朝向为竖直方向,通过旋转桨叶方向控制机器人上升或下潜的深度。
22、作为优选,所述方法还包括:
23、当所述机器人位于陆行场景时,通过控制腿部装置折叠,降低主机高度,辅助轮和轮框外侧同时接触地面;通过轮框旋转驱动机器人行进,通过两侧桨轮装置差速控制机器人行进方向。
24、作为优选,所述方法还包括:
25、当所述机器人位于水陆过渡场景中,在水深度小于主机(1)入水高度时,桨轮装置(3)转至朝向主机前方,通过控制腿部装置(2)执行跨步动作前进;
26、在水深度大于主机(1)入水高度或腿部装置(2)无法跨步前进时,第一腿部件(201)和第二腿部件(202)折叠,使桨轮装置(3)贴近主机(1)中部,桨轮装置(3)朝向主机前方;桨轮装置旋转时,通过旋转桨叶(302)驱动机器人行进,通过控制桨轮装置(3)朝向或两侧桨轮装置(3)差速控制机器人行进方向。
27、本方案采用适用于陆行和水行两用的桨轮装置,在陆行场景中,实现轮腿机器人的运行方式,利用轮框实现动力轮的功能,轮框接触地面进行支撑和行进。在水下场景中,利用桨叶实现螺旋桨的功能。同时腿部装置的跨步动作前进方式和轮式前进的方式,能够适应于不同的应用场景。特别是跨步动作能够用于跨越障碍。特别针对于于水陆过渡的浅滩地区,腿部装置的跨步动作前进方式,能够较好的应对于浅滩水下的泥沙表面。
技术特征:
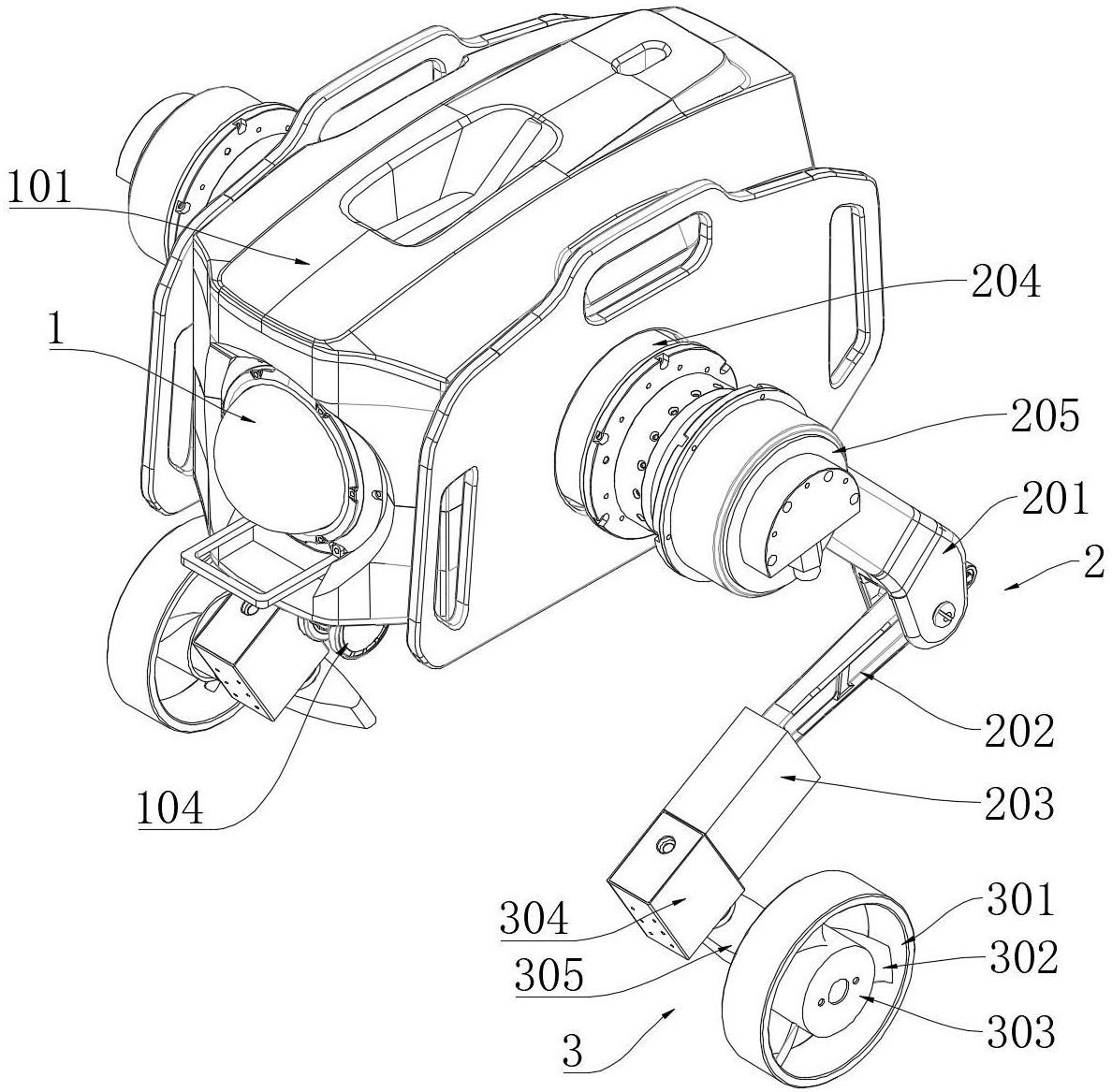
1.一种水陆两栖机器人,其特征是,包括主机(1)、可执行快步动作的腿部装置(2)、桨轮装置(3);
2.根据权利要求1所述的一种水陆两栖机器人,其特征是,所述动力单元为轮毂电机(303),所述轮毂电机(303)和轮框(301)通过呈辐射状布置的桨叶(302)相连接。
3.根据权利要求2所述的一种水陆两栖机器人,其特征是,所述转向机构采用舵机(304),所述舵机(304)设置在第二腿部件(202)的末端,舵机(304)的输出设有轮毂固定盘(305),所述轮毂电机(303)通过轮毂固定盘(305)连接舵机(304),所述轮毂电机(303)的轴向与舵机(304)的输出轴垂直;舵机(304)的输出轴转动控制轮毂电机(303)的轴向方向,使轮毂电机(303)的轴向朝向第二腿部件(202)末端的延伸方向或垂直第一腿部件(201)、第二腿部件(202)所在平面。
4.根据权利要求1所述的一种水陆两栖机器人,其特征是,所述主机(1)形状为横置的圆柱体,主机(1)内部设有电池(102)、控制主板(103)和感知元件,所述感知元件设置在主机(1)的前部,电池(102)设置在主机(1)内部偏下的位置,使主机(1)的重心位于主机(1)的下半侧,所述腿部装置(2)与主机(1)的连接的所在平面位于主机(1)重心的上方,所述主机浮体(101)设置在主机(1)的顶部。
5.根据权利要求1所述的一种水陆两栖机器人,其特征是,所述腿部装置(2)还包括第一动力关节(204)、第二动力关节(205)、第一连杆(206)和第二连杆(207);
6.根据权利要求5所述的一种水陆两栖机器人,其特征是,所述的第一动力关节(204)、第二动力关节(205)同轴设置在第一腿部件(201)的两侧,第一腿部件(201)为中空结构,第一连杆(206)、第二连杆(207)以及第二动力关节(205)的输出轴均位于第一腿部件(201)的内部。
7.根据权利要求1所述的一种水陆两栖机器人,其特征是,所述的主机(1)正下方设置有辅助轮(104)。
8.一种水陆两栖机器人的控制方法,其特征是,所述方法用于控制水陆两栖机器人从陆行至水下运行,包括:
9.根据权利要求8所述的一种水陆两栖机器人的控制方法,其特征是,所述方法还包括:
10.根据权利要求8所述的一种水陆两栖机器人的控制方法,其特征是,所述方法还包括:
技术总结
本发明公开了一种水陆两栖机器人,包括主机、主机浮体、可执行快步动作的腿部装置、桨轮装置;所述主机,至少在主机上设有主机浮体;所述腿部装置,设置在主机的两侧,包括可折叠伸展的第一腿部件和第二腿部件,所述第一腿部件可相对主机前后摆动,所述第二腿部件转动连接第一腿部件的末端并可相对第一腿部件前后摆动,所述第二腿部件的末端设有腿部浮体;可转动的所述桨轮装置,设置在第二腿部件的末端,桨轮装置包括用于陆地行进的轮框、设置在轮框内侧的桨叶、用于控制桨轮装置朝向转向机构以及驱动轮框旋转的动力单元。
技术研发人员:陈万楷,刘春宝,朱力军,江微杰,刘彦禹,郑淳馨
受保护的技术使用者:无锡泉智博科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!