车辆控制装置、车辆控制方法以及车辆控制用计算机程序与流程
本发明涉及对车辆进行自动驾驶控制的车辆控制装置、车辆控制方法以及车辆控制用计算机程序。
背景技术:
1、在车辆的自动驾驶控制中,为了确保车辆的安全,要求能够精度良好地检测存在于车辆的周围的物体。因此,提出了根据搭载于车辆的传感器的检测距离来控制车辆的技术(参照日本特开2020-125103号公报)。
2、在日本特开2020-125103号公报所记载的自主驾驶车辆的方法中,将车辆的位置分配到包含坡度信息的地形图中的场所,关于车辆的场所的前方和后方的预定范围,从地形图中取出坡度信息。另外,该方法基于坡度信息、前部和后部传感器的位置、以及前部传感器的视野的垂直开口角,决定用于检测具有特定的垂直高度的物体的前部和后部传感器的最大检测距离。而且,该方法决定车辆的预定的驾驶操作或者当前的行驶状态所需的前部和后部传感器的最小检测距离,以所需的最小检测距离为前部和后部传感器的最大检测距离以下的方式驱动车辆。
技术实现思路
1、即使在对车辆进行自动驾驶控制的期间,该车辆也要求遵守关于车辆的行驶规定的法规。特别是,当紧急车辆在被自动驾驶控制的车辆的周边行驶的情况下,要求以不妨碍该紧急车辆的行驶的方式控制车辆。然而,有时其他车辆追随被自动驾驶控制的车辆而行驶。在这样的情况下,被自动驾驶控制的车辆的周围、特别是该车辆的后方的视野被遮挡,该车辆有时无法充分监视本车辆的周围。
2、因此,本发明的目的在于提供一种车辆控制装置,即使在难以检测从本车辆的后方接近的物体的情况下,也能够降低该接近的物体与本车辆接触的可能性。
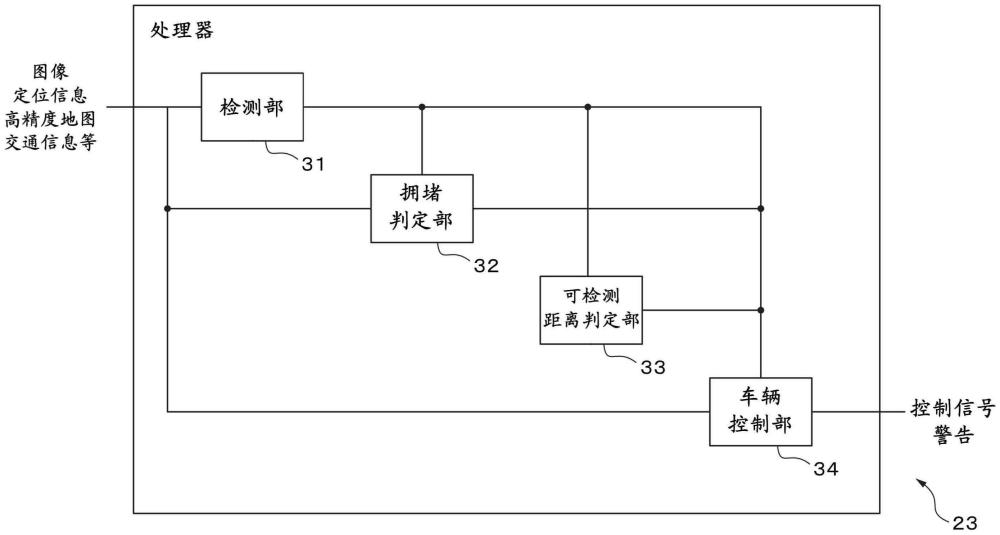
3、根据一个实施方式,提供一种对车辆进行自动驾驶控制的车辆控制装置。该车辆控制装置具有:可检测距离判定部,基于来自搭载于车辆的、能够检测车辆的周围的其他物体的传感器的传感器信号,求出在车辆的后方能够检测其他物体的后方检测距离;以及车辆控制部,在后方检测距离小于第1距离阈值的期间持续第1预定时间以上时,变更应用于车辆的自动驾驶控制等级,以使驾驶员对驾驶的参与程度变高。
4、该车辆控制装置优选的是,还具有拥堵判定部,该拥堵判定部判定车辆的周围是否拥堵,车辆控制部在车辆的周围拥堵的情况下,在后方检测距离小于第1距离阈值的期间持续第1预定时间以上时,将应用于车辆的自动驾驶控制等级从不需要驾驶员的参与的控制等级变更为需要驾驶员的参与的控制等级。
5、另外,在该车辆控制装置中,优选的是,车辆控制部在后方检测距离小于比第1距离阈值长的第2距离阈值的期间持续第2预定时间以上时,使车辆所行驶的车道内的、该车道的横穿方向上的车辆的位置的调整量比后方检测距离为第2距离阈值以上的情况小。
6、进而,在该车辆控制装置中,优选的是,车辆控制部将在车辆正在行驶的道路上具有路肩的情况下的第1距离阈值设定为比在车辆正在行驶的道路上没有路肩的情况下的第1距离阈值小。
7、另外,该车辆控制装置优选还具有检测部,该检测部基于传感器信号检测存在于车辆的周围的物体。而且,优选的是,车辆控制部基于检测部得到物体的检测结果,判定是否为在最近的预定期间内其他车辆可能在车辆正在行驶的道路的路肩行驶的状态,将处于其他车辆可能行驶的状态的情况下的第1距离阈值设定为比并非其他车辆可能行驶的状态的情况下的第1距离阈值小。
8、再或者,在该车辆控制装置中,优选的是,车辆正在行驶的道路所包含的车道的宽度越窄,车辆控制部将第1距离阈值设定得越小。
9、根据另一实施方式,提供一种对车辆进行自动驾驶控制的车辆控制方法。该车辆控制方法包括:基于来自搭载于车辆的、能够检测车辆的周围的其他物体的传感器的传感器信号,求出在车辆的后方能够检测到其他物体的后方检测距离,在后方检测距离小于第1距离阈值的期间持续第1预定时间以上时,变更应用于车辆的自动驾驶控制等级,以使驾驶员对驾驶的参与程度变高。
10、根据又一实施方式,提供一种用于对车辆进行自动驾驶控制的车辆控制用计算机程序。该车辆控制用计算机程序包括用于使搭载于车辆的处理器执行如下动作的命令:基于来自搭载于车辆的、能够检测车辆的周围的其他物体的传感器的传感器信号,求出在车辆的后方能够检测到其他物体的后方检测距离,在后方检测距离小于第1距离阈值的期间持续第1预定时间以上时,变更应用于车辆的自动驾驶控制等级,以使驾驶员对驾驶的参与程度变高。
11、本公开的车辆控制装置起到如下效果:即使在难以检测从本车辆的后方接近的物体的情况下,也能够降低该接近的物体与本车辆接触的可能性。
技术特征:
1.一种车辆控制装置,对车辆进行自动驾驶控制,其中,该车辆控制装置具有:
2.根据权利要求1所述的车辆控制装置,其中,
3.根据权利要求1或2所述的车辆控制装置,其中,
4.根据权利要求1~3中任一项所述的车辆控制装置,其中,
5.根据权利要求1~3中任一项所述的车辆控制装置,其中,
6.根据权利要求1~3中任一项所述的车辆控制装置,其中,
7.一种车辆控制方法,对车辆进行自动驾驶控制,其中,该车辆控制方法包括:
8.一种车辆控制用计算机程序,其中,该车辆控制用计算机程序用于使搭载于所述车辆的处理器执行如下动作:
技术总结
本发明涉及车辆控制装置、车辆控制方法以及车辆控制用计算机程序。车辆控制装置具有:可检测距离判定部(33),基于来自搭载于车辆(10)的、能够检测车辆(10)的周围的其他物体的传感器(3‑2)的传感器信号,求出在车辆(10)的后方能够检测到其他物体的后方检测距离;以及车辆控制部(34),在后方检测距离小于第1距离阈值的期间持续第1预定时间以上时,变更应用于车辆(10)的自动驾驶控制等级,以使驾驶员对驾驶的参与程度变高。
技术研发人员:黑田龙介
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!