一种车辆座椅控制方法、装置及车辆与流程
本发明涉及智能驾驶,尤其涉及一种车辆座椅控制方法、装置及车辆。
背景技术:
1、随着经济的发展,消费逐渐升级,车辆产品越来越注重以人为本,智能化的设计理念。尤其是国产品牌面临向上发展的迫切需要,如何体现以人为本的设计理念打造更高价值的产品,解决当前车辆驾乘体验方面的一些痛点问题成为当前车辆设计面临的核心课题之一。
2、具体来讲,车辆在刹车过程,由于惯性作用力的影响,当刹车减速度超出临界值时,车内乘客就会倾倒造成强烈的冲击感不舒适感,另外在其他减速度场景例如急转弯时也会存在这个问题,安全带设计只是在一定程度上保护乘员,但安全带并不能抵消惯性力带来的冲击感不舒适感。这个问题一直以来是影响驾乘体验的重点问题,难点问题,目前对此类痛点问题没有专门针对性的有效的解决方案。
技术实现思路
1、本技术的目的是提供一种车辆座椅控制方法、装置及车辆,用于解决车辆在刹车或者转弯过程中由于惯性力的作用给乘员造成冲击倾倒的不舒适感的问题。
2、第一方面,本技术实施例提供了一种车辆座椅控制方法,包括:
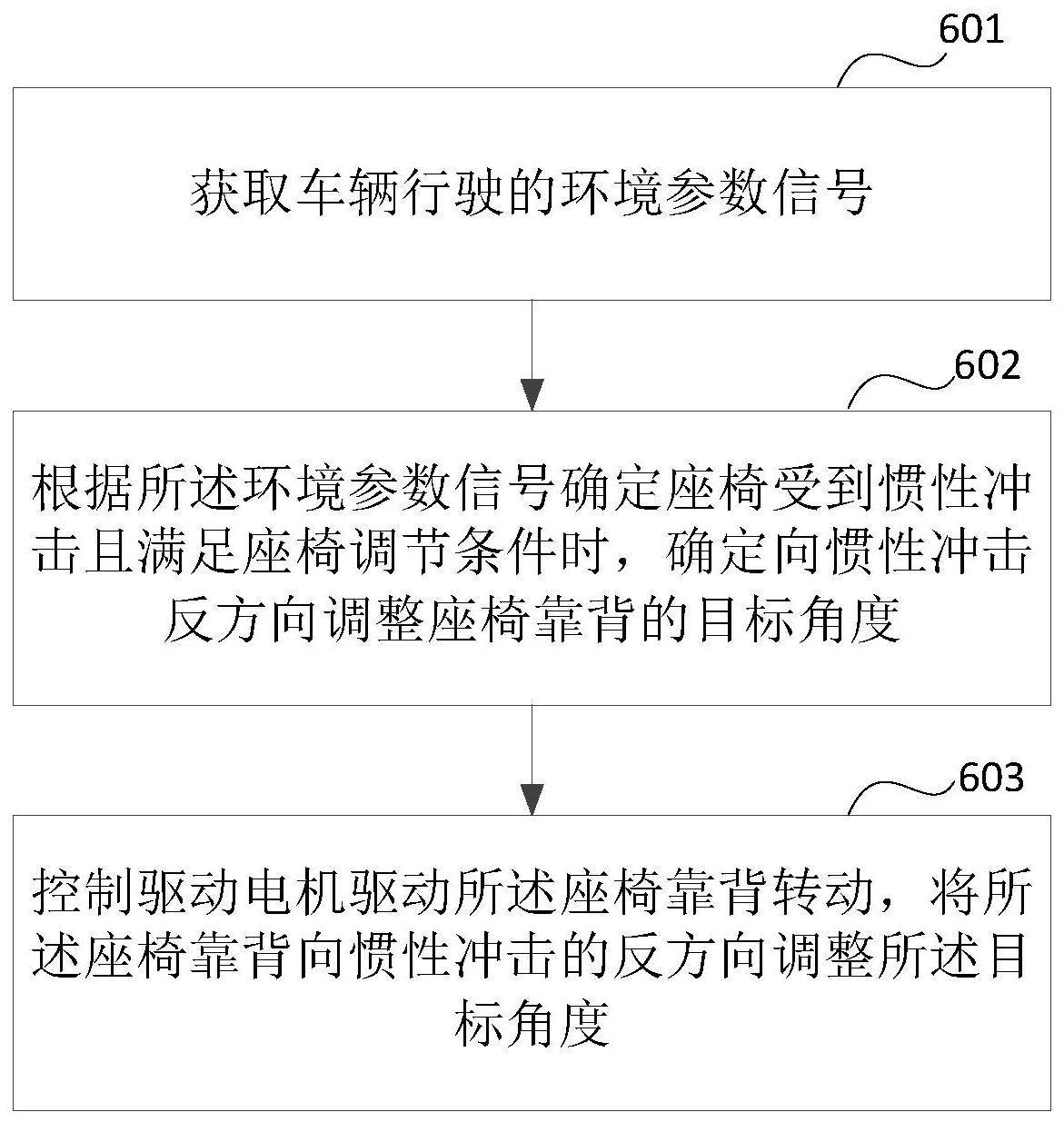
3、获取车辆行驶的环境参数信号;
4、根据所述环境参数信号确定座椅受到惯性冲击且满足座椅调节条件时,确定向惯性冲击的反方向调整座椅靠背的目标角度;
5、控制驱动电机驱动所述座椅靠背转动,将所述座椅靠背向惯性冲击的反方向调整所述目标角度。
6、在一些可能的实施例中,所述环境参数信号包括车辆速度信号、制动踏板信号,根据所述环境参数信号确定座椅受到惯性冲击且满足座椅调节条件,包括如下至少一个步骤:
7、根据所述车辆速度信号确定制动减速度信号,确定所述制动减速度信号超过设定减速度阈值时,座椅受到惯性冲击且满足座椅调节条件;
8、检测到制动踏板信号时,确定座椅受到惯性冲击且满足座椅调节条件。
9、在一些可能的实施例中,所述环境参数信号包括车辆速度信号和成员载荷感应信号,确定向惯性冲击的反方向调整座椅靠背的目标角度,包括:
10、若采用第一调整策略,获取预先设置的固定角度,将所述固定角度确定为向惯性冲击的反方向调整座椅靠背的目标角度;
11、若采用第二调整策略,根据所述车辆速度信号确定制动减速度信号,根据所述制动减速度信号和成员载荷感应信号计算惯性力矩;
12、根据座椅靠背角度与重力力矩的约束关系,确定重力力矩与所述惯性力矩平衡时对应的目标座椅靠背角度;
13、根据所述目标座椅靠背角度,确定向惯性冲击的反方向调整座椅靠背的目标角度。
14、在一些可能的实施例中,根据所述制动减速度信号和成员载荷感应信号计算惯性力矩,包括:
15、计算f=m*(a+△a);
16、其中,f为所述惯性力矩,m为所述乘员载荷信号,a为所述制动减速度信号,△a为设定的减速度滞后调整值。
17、在一些可能的实施例中,所述环境参数信号还包括路面坡度信号,根据座椅靠背角度与重力力矩的约束关系,确定重力力矩与所述惯性力矩平衡时对应的目标座椅靠背角度,包括:
18、计算an=arctan(f/m*g)-β;
19、其中,an为所述目标座椅靠背角度,f为所述惯性力矩,m为所述乘员载荷感应信号,g为重力加速度,β为所述路面坡度信号。
20、在一些可能的实施例中,所述车辆行驶环境参数还包括制动踏板信号,所述确定向惯性冲击的反方向调整座椅靠背的目标角度,包括如下至少一个步骤:
21、若检测到制动踏板信号且未处于紧急制动状态,先按照第一调整策略确定向惯性冲击的反方向调整的目标角度,之后按照第二调整策略确定向惯性冲击的反方向调整的目标角度;所述第一调整策略中的固定角度为预先设置的最小梯度角度;
22、若检测到制动踏板信号且为紧急制动时,按照第一调整策略确定向惯性冲击的反方向调整的目标角度,所述第一调整策略中的固定角度为最大梯度角度。
23、在一些可能的实施例中,所述车辆行驶环境参数信号还包括驾驶模式,所述确定向惯性冲击的反方向调整座椅靠背的目标角度,包括:
24、确定当前的驾驶模式为完全智能驾驶模式时,先按照第一调整策略确定向惯性冲击的反方向调整的目标角度,之后按照第二调整策略确定向惯性冲击的反方向调整的目标角度,所述第一调整策略中的固定角度为预先设置的最小梯度角度;
25、确定当前的驾驶模式为辅助智能驾驶或完全人工驾驶模式时,主驾座椅按照第一调整策略,所述第一调整策略中的固定角度为最大梯度角度,其他座椅先按照第一调整策略确定向惯性冲击的反方向调整的目标角度,所述第一调整策略中的固定角度为预先设置的最小梯度角度,之后按照第二调整策略确定向惯性冲击的反方向调整的目标角度。
26、在一些可能的实施例中所述车辆行驶环境参数还包括车距信号和车辆速度信号,检测到紧急制动,包括:
27、根据车辆速度信号和车距信号,确定不撞车所需的减速度值大于设定的减速度阈值且根据当前所述制动减速度信号的变化率大于设定的变化率阈值,确认为检测到紧急制动。
28、在一些可能的实施例中,获取车辆行驶的环境参数信号,包括:
29、根据动力系统信号确定车辆点火时,获取车辆行驶的环境参数信号。
30、将所述座椅靠背向惯性冲击的反方向调整所述目标角度之后,还包括:
31、根据车辆速度信号确定车辆速度增加或者获取到制动解除信号时,将座椅调整到预先记忆存储的座椅姿态。
32、第二方面,本技术实施例提供了一种车辆座椅控制装置,所述装置包括:
33、环境参数信号采集模块,用于获取车辆行驶的环境参数信号;
34、控制模块,用于根据所述环境参数信号确定座椅受到惯性冲击且满足座椅调节条件时,确定向惯性冲击的反方向调整座椅靠背的目标角度;
35、座椅调整模块,用于控制驱动电机驱动所述座椅靠背转动,将所述座椅靠背向惯性冲击的反方向调整所述目标角度。
36、在一些可能的实施例中,所述环境参数信号包括车辆速度信号、制动踏板信号,所述控制模块,用于根据所述环境参数信号确定座椅受到惯性冲击且满足座椅调节条件,包括:
37、根据所述车辆速度信号确定制动减速度信号,确定所述制动减速度信号超过设定减速度阈值时,座椅受到惯性冲击且满足座椅调节条件;
38、检测到制动踏板信号时,确定座椅受到惯性冲击且满足座椅调节条件。
39、在一些可能的实施例中,所述环境参数信号包括车辆速度信号和成员载荷感应信号,所述控制模块确定向惯性冲击的反方向调整座椅靠背的目标角度,包括:
40、若采用第一调整策略,获取预先设置的固定角度,将所述固定角度确定为向惯性冲击的反方向调整座椅靠背的目标角度;
41、若采用第二调整策略,根据所述车辆速度信号确定制动减速度信号,根据所述制动减速度信号和成员载荷感应信号计算惯性力矩;
42、根据座椅靠背角度与重力力矩的约束关系,确定重力力矩与所述惯性力矩平衡时对应的目标座椅靠背角度;
43、根据所述目标座椅靠背角度,确定向惯性冲击的反方向调整座椅靠背的目标角度。
44、在一些可能的实施例中,所述控制模块用于根据所述制动减速度信号和成员载荷感应信号计算惯性力矩,包括:
45、计算f=m*(a+△a);
46、其中,f为所述惯性力矩,m为所述乘员载荷信号,a为所述制动减速度信号,△a为设定的减速度滞后调整值。
47、在一些可能的实施例中,所述环境参数信号还包括路面坡度信号,所述控制模块根据座椅靠背角度与重力力矩的约束关系,确定重力力矩与所述惯性力矩平衡时对应的目标座椅靠背角度,包括:
48、计算an=arctan(f/m*g)-β;
49、其中,an为所述目标座椅靠背角度,f为所述惯性力矩,m为所述乘员载荷感应信号,g为重力加速度,β为所述路面坡度信号。
50、在一些可能的实施例中,所述车辆行驶环境参数还包括制动踏板信号,所述控制模块确定向惯性冲击的反方向调整座椅靠背的目标角度,包括如下至少一个步骤:
51、若检测到制动踏板信号且未处于紧急制动状态,先按照第一调整策略确定向惯性冲击的反方向调整的目标角度,之后按照第二调整策略确定向惯性冲击的反方向调整的目标角度;所述第一调整策略中的固定角度为预先设置的最小梯度角度;
52、若检测到制动踏板信号且为紧急制动时,按照第一调整策略确定向惯性冲击的反方向调整的目标角度,所述第一调整策略中的固定角度为最大梯度角度。
53、在一些可能的实施例中,所述车辆行驶环境参数信号还包括驾驶模式,所述控制模块确定向惯性冲击的反方向调整座椅靠背的目标角度,包括:
54、确定当前的驾驶模式为完全智能驾驶模式时,先按照第一调整策略确定向惯性冲击的反方向调整的目标角度,之后按照第二调整策略确定向惯性冲击的反方向调整的目标角度,所述第一调整策略中的固定角度为预先设置的最小梯度角度;
55、确定当前的驾驶模式为辅助智能驾驶或完全人工驾驶模式时,主驾座椅按照第一调整策略,所述第一调整策略中的固定角度为最大梯度角度,其他座椅先按照第一调整策略确定向惯性冲击的反方向调整的目标角度,所述第一调整策略中的固定角度为预先设置的最小梯度角度,之后按照第二调整策略确定向惯性冲击的反方向调整的目标角度。
56、在一些可能的实施例中,所述车辆行驶环境参数还包括车距信号和车辆速度信号,所述控制模块检测到紧急制动,包括:
57、根据车辆速度信号和车距信号,确定不撞车所需的减速度值大于设定的减速度阈值且根据当前所述制动减速度信号的变化率大于设定的变化率阈值,确认为检测到紧急制动。
58、在一些可能的实施例中,所述环境参数信号采集模块获取车辆行驶的环境参数信号,包括:
59、根据动力系统信号确定车辆点火时,获取车辆行驶的环境参数信号。
60、所述座椅调整模块将所述座椅靠背向惯性冲击的反方向调整所述目标角度之后,还用于:
61、根据车辆速度信号确定车辆速度增加或者获取到制动解除信号时,将座椅调整到预先记忆存储的座椅姿态。
62、第三方面,本技术另一实施例还提供了一种车辆,包括上述实施例提供的车辆座椅控制装置。
63、第四方面,本技术另一实施例还提供了一种计算机存储介质,所述计算机存储介质存储有计算机程序,所述计算机程序用于使计算机执行本技术实施例提供的任一车辆座椅控制方法。
64、本技术实施例,利用了运动动力学原理,当检测到乘员受到向前的惯性冲击时,通过确定并调节座椅靠背需要与惯性力相反方向的目标角度,让乘员后背朝惯性力的反方向运用,以解决在急速刹车和急速转弯中来抵消惯性力带来的向前倾倒的不舒适感的问题。
65、本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!