矿用自卸车线控化正比例无人驾驶制动系统及使用方法与流程
本发明涉及矿山机械,具体是矿用自卸车线控化正比例无人驾驶制动系统及使用方法。
背景技术:
1、矿用自卸车露天矿山道路情况复杂,具有坡道窄、峭的特点,雨天泥泞积水,环境噪音大,大风天气又容易尘土飞扬的特点。矿用无人驾驶自卸车,在海外如澳大利亚、巴西等国家已得到了广泛的运用,其经济效益、安全性已得到了验证;但在国内的运用依旧较少。自卸车无人驾驶工况恶劣,车辆联调作业,且作业场地更换频繁,制动时存在重载下坡、急停等各种不利因素;同时通过远程线控制动的方式也对制动效果、响应时间等特性提出了新的要求,要求在保留常规车型人工操作制动的基础上提供远程线控制动的功能,同时系统具备失电时紧急制动的功能。
技术实现思路
1、本发明所要解决的技术问题在于克服上述现有技术之不足,提供一种结构简单、效果良好的矿用自卸车线控化正比例无人驾驶制动系统及使用方法。
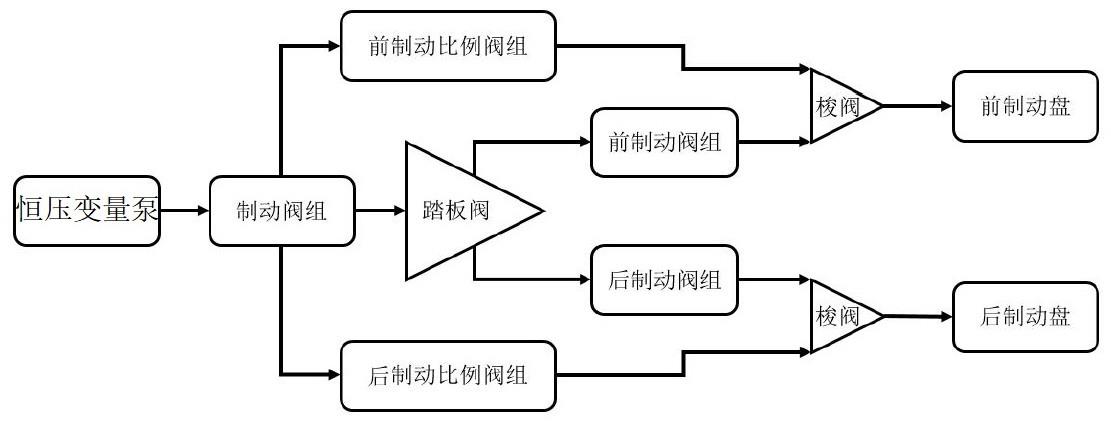
2、本发明是以如下技术方案实现的:矿用自卸车线控化正比例无人驾驶制动系统,包括连接油箱的液压泵,所述液压泵通过制动阀组连接有前制动系统和后制动系统;
3、所述前制动系统包括双路制动阀、前制动比例阀组、前制动阀组和前桥干式制动器;
4、所述前制动阀组包括电磁换向阀ⅰ、减压阀ⅰ和电磁换向阀ⅱ;
5、所述前制动比例阀组包括滤芯ⅰ、比例阀芯ⅰ、继动阀ⅰ和梭阀ⅰ,所述前制动比例阀组设有两个进油端,一个进油端通过滤芯ⅰ分别连接比例阀芯ⅰ和继动阀ⅰ的进油端,所述比例阀芯ⅰ的出油端与继动阀ⅰ的控制端连接在一起,所述继动阀ⅰ的出油端通过梭阀ⅰ与前制动比例阀组的另一个进油端连接,所述梭阀ⅰ的出油端与电磁换向阀ⅱ连接在一起;
6、所述后制动系统包括双路制动阀、液力缓行阀、后制动比例阀组、后制动阀和后桥湿式制动器;
7、所述后制动阀包括溢流阀、阻尼、滤网和减压阀ⅱ;
8、所述后制动比例阀组包括比例阀芯ⅱ、梭阀ⅲ、梭阀ⅳ、继动阀ⅱ和滤芯ⅱ,所述滤芯ⅱ的进油端与后制动比例阀组的进油端连接在一起,所述滤芯ⅱ的出油端分别连接比例阀芯ⅱ和继动阀ⅱ的进油端,所述比例阀芯ⅱ的出油端通过梭阀ⅲ与继动阀ⅱ的控制端连接在一起,所述继动阀ⅱ的出油端通过梭阀ⅳ与后桥湿式制动器的行车活塞腔连接在一起,所述梭阀ⅳ与滤网的出油端连接在一起;
9、所述制动阀组包括电磁换向阀ⅲ和液控换向阀,所述电磁换向阀ⅲ的进油端通过单向阀与液压泵连接在一起,所述电磁换向阀ⅲ的出油端与液控换向阀和减压阀ⅱ的进油端连接在一起,所述液控换向阀的控制端与液压泵连接在一起,所述液控换向阀的输出端与双路制动阀的控制端连接在一起;
10、所述双路制动阀的出油端和液力缓行阀的出油端通过梭阀ⅱ连接在一起,所述梭阀ⅱ的出油端与梭阀ⅲ的进油端连接在一起。
11、其进一步是:所述液压泵为恒压变量液压泵。
12、还包括前桥制动蓄能器和后桥制动蓄能器,所述前桥制动蓄能器和后桥制动蓄能器的进油端分别通过单向阀与液压泵连接在一起。
13、所述前桥制动蓄能器的出油端分为两路分别与双路制动阀和滤芯ⅰ的进油端连接在一起;所述后桥制动蓄能器的出油端分为三路分别与电磁换向阀ⅲ、双路制动阀和液力缓行阀的进油端连接在一起。
14、所述双路制动阀的一路连接前桥制动蓄能器和梭阀ⅰ,所述双路制动阀的另一路连接后桥制动蓄能器和梭阀ⅱ。
15、所述前制动阀组的进油端与电磁换向阀ⅱ的进油端连接在一起,所述电磁换向阀ⅰ和减压阀ⅰ并联在电磁换向阀ⅱ的出油端,所述前制动阀组的出油端与前桥干式制动器连接在一起。
16、所述后制动阀的进油端与减压阀ⅱ的进油端连接在一起,所述减压阀ⅱ出油端分别与滤网和后桥湿式制动器的驻车活塞腔连接在一起,所述滤网的出油端分别连接溢流阀和后制动比例阀组。
17、所述电磁换向阀ⅰ为二位二通电磁换向阀,所述电磁换向阀ⅱ为二位三通电磁换向阀,所述电磁换向阀ⅲ为二位四通电磁换向阀,所述液控换向阀为二位四通液控换向阀。
18、包括人工驾驶和无人驾驶两种操作模式,人工驾驶模式的制动工况包括人工驾驶行车制动、人工驾驶驻车制动、人工驾驶湿滑制动、人工驾驶紧急制动和人工驾驶液力缓行制动,无人驾驶模式的制动包括无人驾驶行车制动、无人驾驶驻车制动、人工驾驶湿滑制动和人工驾驶紧急制动,在无人驾驶中,紧急制动模式、驻车制动模式液压状态与人工操作一致;具体操作如下:
19、人工驾驶行车制动:电磁换向阀ⅲ得电右位工作,电磁换向阀ⅱ不得电左位工作;踩下双路制动阀,电磁换向阀ⅰ不得阀芯电左位工作;
20、人工驾驶驻车制动:按下驻车按钮后,电磁换向阀ⅲ不得左位工作,液控换向阀在右侧控制腔体压力的作用下左移右位工作,电磁换向阀ⅱ得电右位工作;
21、人工驾驶湿滑制动:当处于行车遇到湿滑路面工况时,电磁换向阀ⅱ不得电左位工作,电磁换向阀ⅲ得电右位工作;踩下双路制动阀,电磁换向阀ⅰ得电;
22、人工驾驶紧急制动:当按下紧急制动按钮或系统意外失电时,所有电磁换向阀均不得电左位工作;液控换向阀右侧的压力大于左侧弹簧力工作在右位;
23、人工驾驶-液力缓行制动:当处于下坡行走工况时,电磁换向阀ⅲ得电右位工作,电磁换向阀ⅱ不得电左位工作,拉动液力缓行阀手柄;
24、无人驾驶-行车制动:电磁换向阀ⅲ得电右位工作,电磁换向阀ⅱ不得电左位工作,当需要线控制动时,在地面控制中心发出相关指令,控制器和通讯组件等电控系统设备向比例阀芯ⅰ和比例阀芯ⅱ输出电流,同时电磁换向阀ⅰ不得电阀芯左位工作;
25、无人驾驶-湿滑制动:无人驾驶模式下在湿滑路面行车过程中需要制动时,制动时控制器和通讯组件等电控系统设备向比例阀芯ⅰ和比例阀芯ⅱ输出电流,电磁换向阀ⅱ不得电左位工作,电磁换向阀ⅲ得电右位工作,电磁换向阀ⅰ得电右位工作。
26、本发明具有以下优点:本发明的矿用自卸车线控化正比例无人驾驶制动系统及使用方法,将线控制动与人工操作制动并联,无论哪方发出制动指令车辆均可快速制动,实现手动操作制动和线控远程制动功能的同时实现;同时对原有的液压系统改变较小,车辆改造方便,强度较低。
技术特征:
1.矿用自卸车线控化正比例无人驾驶制动系统,其特征在于:包括连接油箱(33)的液压泵(32),所述液压泵(32)通过制动阀组(20)连接有前制动系统和后制动系统;
2.如权利要求1所述的矿用自卸车线控化正比例无人驾驶制动系统,其特征在于:所述液压泵(32)为恒压变量液压泵。
3.如权利要求1所述的矿用自卸车线控化正比例无人驾驶制动系统,其特征在于:还包括前桥制动蓄能器(23)和后桥制动蓄能器(24),所述前桥制动蓄能器(23)和后桥制动蓄能器(24)的进油端分别通过单向阀(22)与液压泵(32)连接在一起。
4.如权利要求2所述的矿用自卸车线控化正比例无人驾驶制动系统,其特征在于:所述前桥制动蓄能器(23)的出油端分为两路分别与双路制动阀(19)和滤芯ⅰ(7)的进油端连接在一起;所述后桥制动蓄能器(24)的出油端分为三路分别与电磁换向阀ⅲ(21)、双路制动阀(19)和液力缓行阀(17)的进油端连接在一起。
5.如权利要求2所述的矿用自卸车线控化正比例无人驾驶制动系统,其特征在于:所述双路制动阀(19)的一路连接前桥制动蓄能器(23)和梭阀ⅰ(10),所述双路制动阀(19)的另一路连接后桥制动蓄能器(24)和梭阀ⅱ(18)。
6.如权利要求1所述的矿用自卸车线控化正比例无人驾驶制动系统,其特征在于:所述前制动阀组(2)的进油端与电磁换向阀ⅱ(5)的进油端连接在一起,所述电磁换向阀ⅰ(3)和减压阀ⅰ(4)并联在电磁换向阀ⅱ(5)的出油端,所述前制动阀组(2)的出油端与前桥干式制动器(1)连接在一起。
7.如权利要求1所述的矿用自卸车线控化正比例无人驾驶制动系统,其特征在于:所述后制动阀(11)的进油端与减压阀ⅱ(15)的进油端连接在一起,所述减压阀ⅱ(15)出油端分别与滤网(14)和后桥湿式制动器(16)的驻车活塞腔连接在一起,所述滤网(14)的出油端分别连接溢流阀(12)和后制动比例阀组(29)。
8.如权利要求1所述的矿用自卸车线控化正比例无人驾驶制动系统,其特征在于:所述电磁换向阀ⅰ(3)为二位二通电磁换向阀,所述电磁换向阀ⅱ(5)为二位三通电磁换向阀,所述电磁换向阀ⅲ(21)为二位四通电磁换向阀,所述液控换向阀(25)为二位四通液控换向阀。
9.矿用自卸车线控化正比例无人驾驶制动系统的使用方法,其特征在于:包括人工驾驶和无人驾驶两种操作模式,人工驾驶模式的制动工况包括人工驾驶行车制动、人工驾驶驻车制动、人工驾驶湿滑制动、人工驾驶紧急制动和人工驾驶液力缓行制动,无人驾驶模式的制动包括无人驾驶行车制动、无人驾驶驻车制动、人工驾驶湿滑制动和人工驾驶紧急制动,在无人驾驶中,紧急制动模式、驻车制动模式液压状态与人工操作一致;具体操作如下:
技术总结
矿用自卸车线控化正比例无人驾驶制动系统及使用方法,包括连接油箱的液压泵,液压泵通过制动阀组连接有前制动系统和后制动系统;前制动系统包括双路制动阀、前制动比例阀组、前制动阀组和前桥干式制动器。本发明的矿用自卸车线控化正比例无人驾驶制动系统及使用方法,将线控制动与人工操作制动并联,无论哪方发出制动指令车辆均可快速制动,实现手动操作制动和线控远程制动功能的同时实现;同时对原有的液压系统改变较小,车辆改造方便,强度较低。
技术研发人员:徐晟轩,袁自成,朱新波,王嘉伟,朱孝,任晓敏,张浩阳
受保护的技术使用者:徐州徐工矿业机械有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!