一种基于行人分类识别的汽车主动吸能装置及其控制方法
本发明属于汽车吸能装置,具体涉及一种基于行人分类识别的汽车主动吸能装置及其控制方法。
背景技术:
1、汽车的诞生极大地改变了人们的出行方式,同时也带来了诸多不可忽视的问题。行人作为交通环境中的弱势群体,其安全问题引起广泛关注。为预防行人-汽车碰撞事故的发生,将行人检测技术与汽车主动吸能装置相结合是降低行人危险的关键技术,对提高汽车主动安全防护能力具有重要意义,也对减少汽车维修保养等额外花销具有实际意义。
2、目前,沃尔沃汽车公司e·伯根海姆等人提出了“一种用于车辆的行人保护气囊”发明专利,其中,沿车辆的挡风玻璃和/或a柱展开,当车内的传感器系统检测到行人或骑车人存在潜在的碰撞风险时,气囊展开及膨胀将覆盖在挡风玻璃和/或a柱,从而行人/骑车人就撞在了柔软的气囊上。
3、吴泰德等人提出了“一种行人保护系统”发明专利,公开了一种车辆和行人保护系统,该车辆和行人保护系统展开外部安全气囊以阻断和/或缓冲载有外部安全气囊的车辆与行人、动物、其他车辆和/或静止物体之间的接触。在碰撞过程中,行人和车辆保护系统通过使用一个或多个传感器的控制器来确定安全气囊应在何时展开,并利用传感器的反馈来检测危险状况,并且判断危险状况的严重性来激活一个或多个安全气囊。
4、然而,上述两种技术方案中,第一种方案设计的是行人保护气囊装置,未具体实现行人分类识别以及针对性处理。对于儿童等行人,若弹出的行人保护气囊充气量较大,会造成儿童的二次伤害;对于成人等行人,若弹出的行人保护气囊充气量较小,未能实现安全气囊的保护性能;第二种方案使用的是一个或多个传感器对行人或其他碰撞对象进行检测,而这类传感器是在发生碰撞后才能接收到碰撞信息,然后根据接收到的信息进行分析处理,最后汽车控制模块根据分析结果来决定安全气囊是否触发,这将导致安全气囊弹出时间有着更高的要求,存在滞后性,仍对行人造成较大风险。
技术实现思路
1、本发明针对上述现有技术存在的问题,提供一种基于行人分类识别的汽车主动吸能装置及其控制方法。其中,所述方法将行人划分为成人和儿童,通过不同对象以此来建立两种不同的充气气囊,以避免发生充气量过足,造成儿童的二次伤害以及充气量不足,未能有效保护成人头部。此外,本发明技术方案引入yolov5网络构建行人分类模型进行分类检测,使得在人-车碰撞前对危险状况作出预警判断,为行人保护争取到宝贵的时间,在人、车真正接触前实现了整个气囊点爆弹开过程。
2、为此,本发明技术方案如下:
3、一方面,本发明提供的一种基于行人分类识别的汽车主动吸能装置控制方法,汽车主动吸能装置设置于汽车车头,为成人/儿童气囊结构,其中,所述方法包括:
4、利用车载摄像头进行拍摄得到道路实时图像;
5、将所述道路实时图像输入基于yolov5网络构建的行人分类模型进行分类检测得到行人分类结果,所述行人分类结果用于识别所述道路实时图像中是否存在行人以及行人为成人或儿童;
6、利用车载传感设备检测行人与汽车的距离以及获取当前车辆状态,并基于所述行人与汽车的距离以及所述当前车辆状态预判是否会发生行人与汽车的碰撞;
7、若预判出发生碰撞,依据所述行人分类结果,所述汽车主动吸能装置弹出对应成人型气囊或儿童型气囊;否则,继续监测。
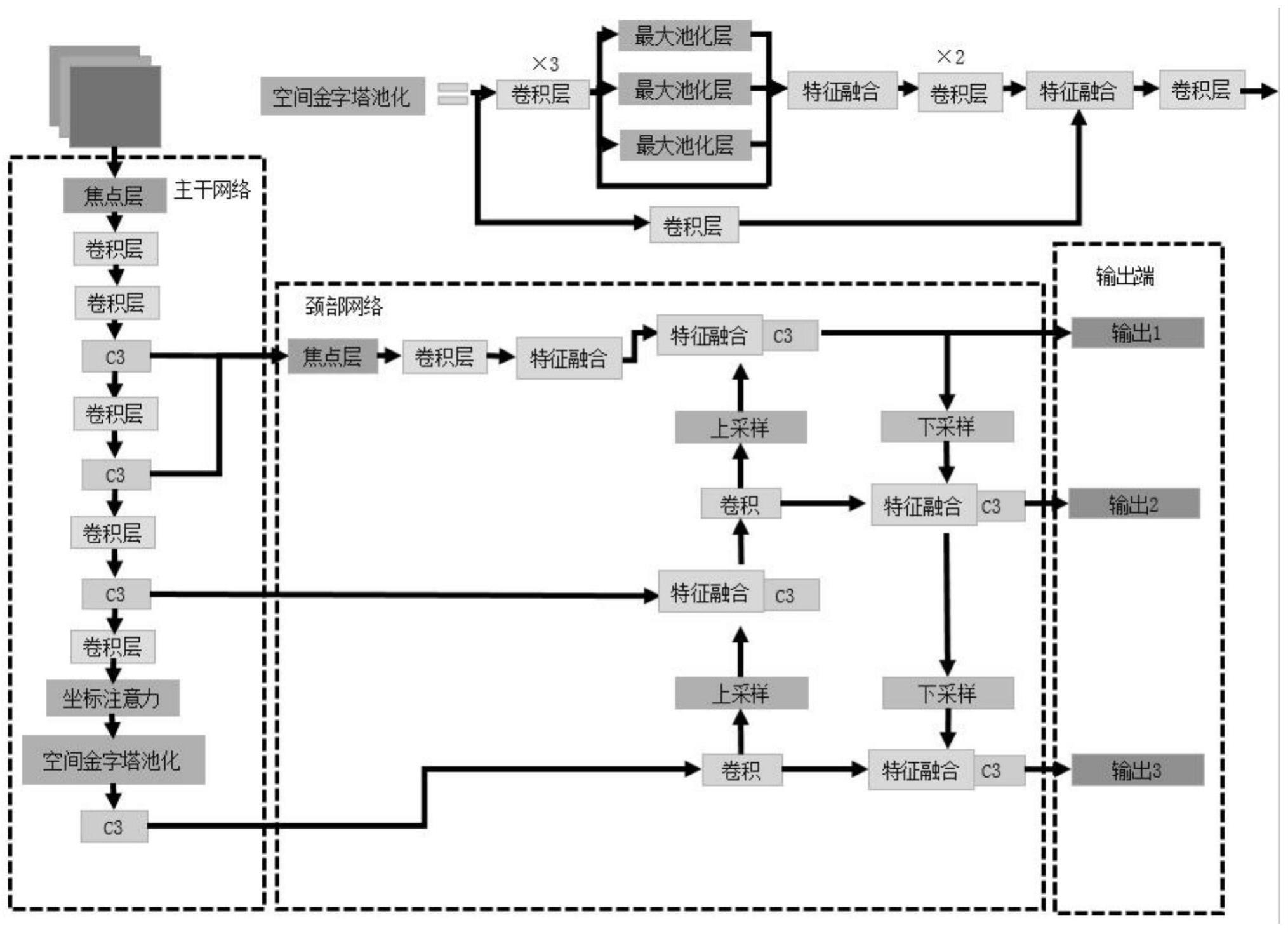
8、进一步可选地,所述yolov5网络包含依次连接的输入端、主干网络backbone、颈部网络neck和输出端head;
9、其中,将传统主干网络backbone中的spp模块替换为空间金字塔池化sppcspc,用以增强网络鲁棒性,提升儿童目标识别抗干扰水平,空间金字塔池化sppcspc分为两个传输路径,第一条传输路径依次设有三个卷积层cbs、最大池化层、特征融合模块、两个卷积层cbs;第二条传输路径设有卷积层cbs,第一条传输路径上最后一个卷积层cbs的输出与第二个传输路径上最后一个卷积层cbs的输出进行特征融合c,再输入卷积层cbs。
10、本发明技术方案考虑到:由于行人会受到光线明暗、服装以及遮蔽等因素的影响,会使网络对行人的检测效果下降,易产生误检等问题。同时在一张图片上,成人和儿童有着不同的尺度,对于小目标行人分辨率普遍较低,像素面积占比较少且易受到图像中噪点的干扰,进而导致网络无法对行人进行精确定位。为使网络不易受到干扰,故引入sppcspc模块来取代spp模块,增强网络的鲁棒性。
11、进一步可选地,所述yolov5网络包含依次连接的输入端、主干网络backbone、颈部网络neck和输出端head;
12、其中,所述主干网络backbone上第一个c3模块上引出另一路输出路径,所述主干网络backbone上的第二个c3模块上引出另一路输出路径,两路径融合,再依次经过焦点层focus、卷积层cbs以及特征融合模块后,再接入所述第二个c3模块向所述颈部网络neck的传统传输路径。
13、本发明技术方案考虑到:在道路交通环境中,行人处于动态状态导致成人大小不一或者儿童较成人外形较小等特点,导致小目标对象会随着网络深度的加深,使图像中的行人特征信息慢慢流失,可识别性逐渐下降,只能看到行人的大致轮廓且越来越模糊,不能与背景区分开来,到最后sppcspc模块所提取到的特征图已无法识别行人的轮廓。为增强网络对小目标行人对象的信息获取能力,故新增一条路径。
14、由上可知,为了提升成人、儿童目标的识别能力,本发明技术方案根据道路实时图像的特征进行上述网络改进。
15、进一步可选地,所述当前车辆状态至少包含当前车速,基于所述距离以及所述当前车辆状态预判是否会发生行人与汽车的碰撞的过程如下:
16、若所述行人为成人且当前车速超过预设车速阈值v1以及所述距离小于预设距离阈值l1,认定所述成人与汽车将发生碰撞;
17、若所述行人为儿童且当前车速超过预设车速阈值v2以及所述距离小于预设距离阈值l2,认定所述儿童与汽车将发生碰撞;
18、其中,所述预设车速阈值v1、所述预设车速阈值v2的取值范围为5.6m/s—11.1m/s;
19、所述预设距离阈值l1、所述预设距离阈值l2的取值范围为6.7m—13.3m。
20、进一步可选地,所述成人型气囊或儿童型气囊展开的气体体积与头型加速度、头型质量的关系式如下:
21、
22、式中,p为气体压强;v为气体体积;n为气体量;r为气体常数;t为气体温度;m为头型质量;s为头型在速度矢量方向的受力面积,a为头型加速度;
23、其中,依据所述关系式以及成人、儿童近似等效的头型质量、头型加速度确定对应成人型气囊、儿童型气囊展开的气体体积。
24、二方面,本发明技术方案还提供一种基于上述方法的控制系统,包括:
25、图像获取模块,用于获取道路实时图像;
26、行人分类模块,用于将所述道路实时图像输入基于yolov5网络构建的行人分类模型进行分类检测得到行人分类结果,所述行人分类结果用于识别所述道路实时图像中是否存在行人以及行人为成人或儿童;
27、碰撞判断模块,用于获取行人与汽车的距离以及当前车辆状态,并基于所述行人与汽车的距离以及所述当前车辆状态预判是否会发生行人与汽车的碰撞;
28、控制模块,用于若预判出发生碰撞,依据所述行人分类结果,所述汽车主动吸能装置弹出对应成人型气囊或儿童型气囊;否则,继续监测。
29、三方面,本发明技术方案提供的一种基于上述方法的汽车主动吸能装置,所述汽车主动吸能装置包括儿童型气囊、成人型气囊,或者所述汽车主动吸能装置包括气囊以及气囊充气设备,所述气囊充气设备依据儿童、成人类型控制所述气囊内的气体体积得到儿童型气囊或成人型气囊。
30、四方面,本发明技术方案提供的一种基于上述方法的车载系统至少包括:汽车控制器、汽车主动吸能装置、车载摄像头、车载传感设备;
31、其中,汽车主动吸能装置、车载摄像头、车载传感设备均与所述汽车控制器连接,所述汽车控制器调用或载入基于yolov5网络构建的行人分类模型;
32、所述车载摄像头将拍摄的道路实时图像传输至所述汽车控制器;
33、所述汽车控制器利用所述行人分类模型对所述道路实时图像进行分类检测得到行人分类结果;
34、所述车载传感设备检测行人与汽车的距离以及获取当前车辆状态,并传输给所述汽车控制器;
35、所述汽车控制器基于所述行人与汽车的距离以及所述当前车辆状态预判是否会发生行人与汽车的碰撞,若预判出发生碰撞,依据所述行人分类结果,所述汽车主动吸能装置弹出对应成人型气囊或儿童型气囊;否则,继续监测。
36、五方面,本发明技术方案提供的一种计算机可读存储介质,存储了计算机程序,所述计算机程序被处理器调用以实现:
37、获取道路实时图像;
38、将所述道路实时图像输入基于yolov5网络构建的行人分类模型进行分类检测得到行人分类结果,所述行人分类结果用于识别所述道路实时图像中是否存在行人以及行人为成人或儿童;
39、获取行人与汽车的距离以及当前车辆状态,并基于所述距离以及所述当前车辆状态预判是否会发生行人与汽车的碰撞;
40、若预判出发生碰撞,依据所述行人分类结果,所述汽车主动吸能装置弹出对应成人型气囊或儿童型气囊;否则,继续监测。
41、有益效果
42、与现有方法相比,本发明的优点有:
43、1.本发明技术方案提供的控制方法,一方面将行人划分为成人和儿童,针对成人和儿童分别弹出成人型气囊、儿童型气囊,避免发生充气量过足,造成儿童的二次伤害以及充气量不足,未能有效保护成人头部。二方面,本发明技术方案引入yolov5网络构建行人分类模型进行分类检测,使得在人-车碰撞前对危险状况作出预警判断,为行人保护争取到宝贵的时间,在人、车真正接触前实现了整个气囊点爆弹开过程,更加有效降低了碰撞危害,
44、2.本发明技术方案优化了传统yolov5网络为了增强网络对小目标特征信息的获取能力,本发明利用浅层网络的特征信息来增强yolov5网络的深层特征与浅层特征融合,故将第一个c3模块输出的特征层与第二个c3模块输出的特征层进行融合。为了将不同尺度的特征层进行融合,本发明采用了焦点层focus,其目的是在不损失特征信息条件下能够实现两倍下采样。本发明引入了空间金字塔池化sppcspc来代替原yolov5网络中的spp模块。在空间金字塔池化sppcspc中,spp包含多种不同的maxpool,使网络有多种感受野来区别不同大小的目标对象;在csp中,首先将特征层分为两部分,其中一部分进行卷积、标准化和激活函数等常规处理,另一部分进行spp结构处理,最后再把这两部分利用concat进行叠加操作,这样有利于减少一半的计算量,使得速度和精度有所提高。由于行人受到色彩、形态以及环境等多种因素的影响,为提取对网络训练更有利的特征,本发明还引入了ca注意力机制,其目的是为了告诉网络更加需要关注哪些内容和哪些位置。
45、3.本发明技术方案通过控制气囊展开体积或气囊的气体量,近似地控制头型撞击气囊的加速度峰值,从而减少对头部产生的损伤。
- 还没有人留言评论。精彩留言会获得点赞!