车辆运行速度确定模型处理方法和车辆运行速度确定方法与流程
本技术涉及人工智能,特别是涉及一种车辆运行速度确定模型处理方法、车辆运行速度确定方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、随着人工智能技术的发展,以及各类导航应用程序或应用系统的广泛使用,对于导航应用获得的车辆航迹推算结果、以及车辆导航效果的准确度要求日益提升。其中,通常需要确定出车辆运行过程中的车辆运行速度,并根据车辆运行速度进行车辆航迹推算,以推算得到车辆的瞬时位置,实现连续式自主定位,以达到车辆导航的目的。
2、传统上,通常通过车辆上的智能设备比如智能手机等,获取gnss(即the globalnavigation satellite system,理解为全球卫星导航系统)观测数据,以基于gnss观测数据进行车辆运行速度估计,确定出车辆当前运行过程中的运行速度,再基于运行速度以及车辆航迹等实现驾车导航。
3、然而,传统上基于gnss观测数据进行车辆运行速度估计的方式,由于gnss观测数据对观测环境要求较高,在比如隧道或高架下等恶劣观测环境下,智能手机则无法即时获得准确的gnss观测数据,存在观测数据延迟导致的运行速度误差较大的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提升车辆运行过程中所确定出的运行速度的准确度的车辆运行速度确定模型处理方法、车辆运行速度确定方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种车辆运行速度确定模型处理方法。所述方法包括:
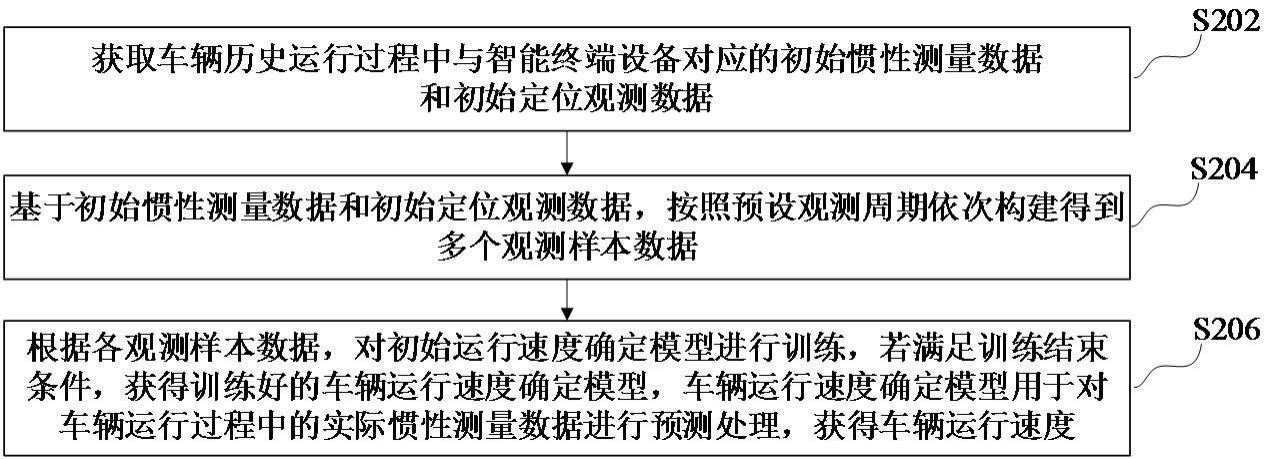
3、获取车辆历史运行过程中与智能终端设备对应的初始惯性测量数据和初始定位观测数据;
4、基于所述初始惯性测量数据和所述初始定位观测数据,按照预设观测周期依次构建得到多个观测样本数据;
5、根据各所述观测样本数据,对初始运行速度确定模型进行训练,若满足训练结束条件,获得训练好的车辆运行速度确定模型;所述车辆运行速度确定模型用于对车辆运行过程中的实际惯性测量数据进行预测处理,获得车辆运行速度。
6、第二方面,本技术提供了一种车辆运行速度确定方法。所述方法包括:
7、接收车辆运行速度确定请求,获取所述车辆运行速度确定请求对应的车辆运行过程中的实际惯性测量数据;
8、基于所述实际惯性测量数据进行格式转换处理,获得目标格式的实际惯性测量数据;
9、根据训练好的车辆运行速度确定模型,对所述目标格式的实际惯性测量数据进行运行速度预测处理,获得对应的车辆运行速度;
10、其中,所述训练好的车辆运行速度确定模型,是根据初始惯性测量数据和初始定位观测数据构建得到的多个观测样本数据,对初始运行速度确定模型的训练过程中,在满足训练结束条件时获得的。
11、第三方面,本技术还提供了一种车辆运行速度确定模型处理装置。所述装置包括:
12、初始数据获得模块,用于获取车辆历史运行过程中与智能终端设备对应的初始惯性测量数据和初始定位观测数据;
13、观测样本数据构建模块,用于基于所述初始惯性测量数据和所述初始定位观测数据,按照预设观测周期依次构建得到多个观测样本数据;
14、车辆运行速度确定模型获得模块,用于根据各所述观测样本数据,对初始运行速度确定模型进行训练,若满足训练结束条件,获得训练好的车辆运行速度确定模型;所述车辆运行速度确定模型用于对车辆运行过程中的实际惯性测量数据进行预测处理,获得车辆运行速度。
15、第四方面,本技术还提供了一种车辆运行速度确定装置。所述装置包括:
16、实际惯性测量数据获得模块,用于接收车辆运行速度确定请求,获取所述车辆运行速度确定请求对应的车辆运行过程中的实际惯性测量数据;
17、格式转换处理模块,用于基于所述实际惯性测量数据进行格式转换处理,获得目标格式的实际惯性测量数据;
18、运行速度预测处理模块,用于根据训练好的车辆运行速度确定模型,对所述目标格式的实际惯性测量数据进行运行速度预测处理,获得对应的车辆运行速度;其中,所述训练好的车辆运行速度确定模型,是根据初始惯性测量数据和初始定位观测数据构建得到的多个观测样本数据,对初始运行速度确定模型的训练过程中,在满足训练结束条件时获得的。
19、第五方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
20、获取车辆历史运行过程中与智能终端设备对应的初始惯性测量数据和初始定位观测数据;
21、基于所述初始惯性测量数据和所述初始定位观测数据,按照预设观测周期依次构建得到多个观测样本数据;
22、根据各所述观测样本数据,对初始运行速度确定模型进行训练,若满足训练结束条件,获得训练好的车辆运行速度确定模型;所述车辆运行速度确定模型用于对车辆运行过程中的实际惯性测量数据进行预测处理,获得车辆运行速度。
23、第六方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
24、接收车辆运行速度确定请求,获取所述车辆运行速度确定请求对应的车辆运行过程中的实际惯性测量数据;
25、基于所述实际惯性测量数据进行格式转换处理,获得目标格式的实际惯性测量数据;
26、根据训练好的车辆运行速度确定模型,对所述目标格式的实际惯性测量数据进行运行速度预测处理,获得对应的车辆运行速度;
27、其中,所述训练好的车辆运行速度确定模型,是根据初始惯性测量数据和初始定位观测数据构建得到的多个观测样本数据,对初始运行速度确定模型的训练过程中,在满足训练结束条件时获得的。
28、第七方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
29、获取车辆历史运行过程中与智能终端设备对应的初始惯性测量数据和初始定位观测数据;
30、基于所述初始惯性测量数据和所述初始定位观测数据,按照预设观测周期依次构建得到多个观测样本数据;
31、根据各所述观测样本数据,对初始运行速度确定模型进行训练,若满足训练结束条件,获得训练好的车辆运行速度确定模型;所述车辆运行速度确定模型用于对车辆运行过程中的实际惯性测量数据进行预测处理,获得车辆运行速度。
32、第八方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
33、接收车辆运行速度确定请求,获取所述车辆运行速度确定请求对应的车辆运行过程中的实际惯性测量数据;
34、基于所述实际惯性测量数据进行格式转换处理,获得目标格式的实际惯性测量数据;
35、根据训练好的车辆运行速度确定模型,对所述目标格式的实际惯性测量数据进行运行速度预测处理,获得对应的车辆运行速度;
36、其中,所述训练好的车辆运行速度确定模型,是根据初始惯性测量数据和初始定位观测数据构建得到的多个观测样本数据,对初始运行速度确定模型的训练过程中,在满足训练结束条件时获得的。
37、第九方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
38、获取车辆历史运行过程中与智能终端设备对应的初始惯性测量数据和初始定位观测数据;
39、基于所述初始惯性测量数据和所述初始定位观测数据,按照预设观测周期依次构建得到多个观测样本数据;
40、根据各所述观测样本数据,对初始运行速度确定模型进行训练,若满足训练结束条件,获得训练好的车辆运行速度确定模型;所述车辆运行速度确定模型用于对车辆运行过程中的实际惯性测量数据进行预测处理,获得车辆运行速度。
41、第十方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
42、接收车辆运行速度确定请求,获取所述车辆运行速度确定请求对应的车辆运行过程中的实际惯性测量数据;
43、基于所述实际惯性测量数据进行格式转换处理,获得目标格式的实际惯性测量数据;
44、根据训练好的车辆运行速度确定模型,对所述目标格式的实际惯性测量数据进行运行速度预测处理,获得对应的车辆运行速度;
45、其中,所述训练好的车辆运行速度确定模型,是根据初始惯性测量数据和初始定位观测数据构建得到的多个观测样本数据,对初始运行速度确定模型的训练过程中,在满足训练结束条件时获得的。
46、上述车辆运行速度确定模型处理方法、车辆运行速度确定方法、装置、计算机设备、存储介质和计算机程序产品中,通过获取车辆历史运行过程中与智能终端设备对应的初始惯性测量数据和初始定位观测数据,并基于初始惯性测量数据和初始定位观测数据,按照预设观测周期依次构建得到多个观测样本数据。进一步地,根据各观测样本数据,对初始运行速度确定模型进行训练,若满足训练结束条件,获得训练好的车辆运行速度确定模型,通过综合考虑初始惯性测量数据和初始定位观测数据,可提升所获得的车辆运行速度确定模型的模型精度和预测准确度,从而后续可根据训练好的车辆运行速度确定模型,对车辆运行过程中的实际惯性测量数据进行预测处理,获得车辆运行速度,在当前定位数据观测环境较差,无法准确获得车辆的定位观测数据时,仅根据车辆的实际惯性测量数据即可实现准确预测车辆运行速度,也无需额外接入观测设备或组件,提升了车辆运行速度的预测准确度和预测处理效率。
- 还没有人留言评论。精彩留言会获得点赞!