一种行车交互区域的确定方法以及系统
本发明涉及一种车辆行驶过程中确定交互区域的,更具体的说,尤其涉及一种行车交互区域的确定方法以及系统。
背景技术:
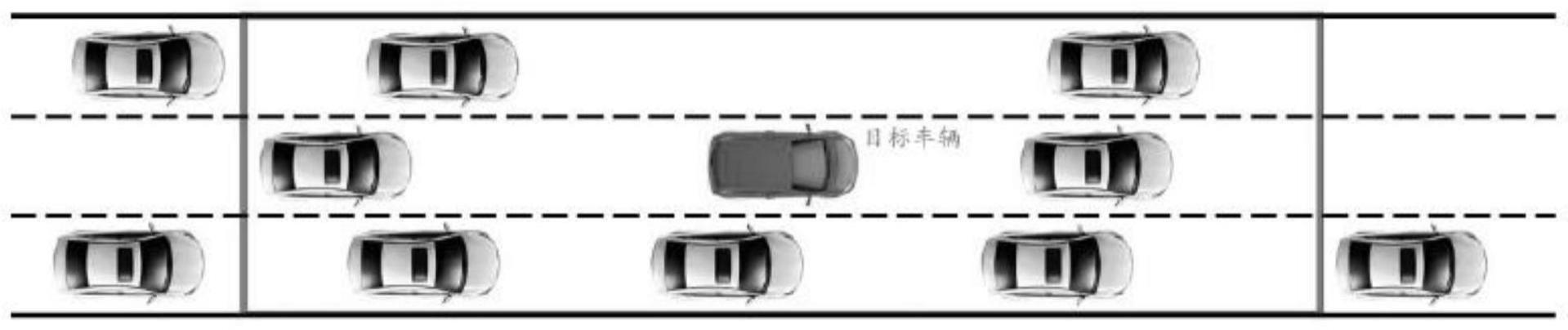
1、车辆在城市道路场景行驶时,会经常与其他个体(包括机动车、非机动车和行人)组成一个相互依赖的整体,从而形成一个包含此相互依赖整体的交互区域,在交互区域内目标车辆与其他个体之间的运动状态、参数进行影响,各自的行为影响彼此的决策;因此对目标车辆的预测轨迹预测、行为决策、风险态势评估以及路径规划需要对周围车辆的轨迹进行预测,从而需要确认目标车辆的交互区域。
2、因此如何实时确定行驶中车辆的交互区域,成为本领域亟需解决的难题。
技术实现思路
1、为了解决上述技术问题,本发明提供一种行车交互区域的确定方法以及系统,所述行车交互区域的确定方法,实时监测进入广义交互区域中车辆信息,当没有车辆进入广义交互区域时,所述广义交互区域为行车交互区域;当监测有车辆进入广义交互区域时,基于自车道的目标车辆特征性能数据、目标车道的前车纵向车速、目标车道的后车纵向车速、车辆安全数据库,通过安全交互区域判断模块确定安全交互区域,所述安全交互区域为行车交互区域,实现实时确定行驶中的目标车辆的交互区域,且交互区域内目标车辆进行转向或变更轨道时不会出现撞车现象;所述交互区域的确定有利于研究交互行为,提取交互特征,对后续研究车辆的意图辨识、轨迹预测、行为决策、风险态势评估以及路径规划等方面十分重要。
2、本发明一个方面提供了一种行车交互区域的确定方法,所述方法包括以下步骤:
3、预设包括车辆与车道参数信息的车辆安全数据库;
4、实时获取自车道的目标车辆的特征性能数据,自车道中线与目标车道边界的距离h;所述自车道的目标车辆的特征性能数据包括自车道的目标车辆实时车速vv、自车道的目标车辆的转向角α;
5、基于目标车辆实时车速vv、目标车辆的转向角α、自车道中线与目标车道边界的距离h以及车辆与车道参数信息,确定广义交互区域;
6、实时监测进入广义交互区域中车辆信息,当没有车辆进入广义交互区域时,所述广义交互区域为行车交互区域;当监测有车辆进入广义交互区域时,获取自车道的目标车辆的特征性能数据、目标车道的前车纵向车速vtp、目标车道的后车纵向车速vtf,基于自车道的目标车辆特征性能数据、目标车道的前车纵向车速、目标车道的后车纵向车速以及车辆安全数据库,确定安全交互区域,所述安全交互区域为行车交互区域;所述目标车辆为研究对象车辆;所述自车道为目标车辆变道前行驶的车道;所述自车道前车为在自车道行驶位于目标车辆前方的车辆;所述目标车道为目标车辆变道时要到达的车道;所述目标车道前车为在目标车道行驶的位置在目标车辆相对前方的车辆;所述目标车道后车为在目标车道行驶的位置在目标车辆相对后方的车辆;
7、所述交互区域为车辆在道路场景行驶时,与其他个体组成一个相互依赖的整体进行交互,车辆与其他个体各自的行为影响彼此决策的区域;
8、广义交互区域是车辆与周围车辆能够发生交互行为的区域;
9、安全交互区域是车辆与周围车辆能够发生交互行为,且有碰撞风险必须马上做出回应行为的区域;自车道中线与目标车道边界的距离h为自车道中线与目标车道远离自车道中线与目标车道的边界之间的距离。
10、与现有技术相比,本发明具有以下有益效果:通过自车道的目标车辆实时车速、目标车辆的转向角、自车道中线与目标车道边界的距离h,实现广义交互区域从纵向与横向两个角度对广义交互区域范围的确定;
11、通过确定广义交互区域后检测广义交互区域内是否有车辆进入,确认交互区域;当广义交互区域中没有车辆进入,广义交互区域为交互区域,从而驾驶人员处于一个相对自由状态,驾驶员可以按自己的意愿采取其驾驶行为,有利于避免交互区域过大导致的驾驶效率降低;
12、当周围车辆进入目标车辆的安全交互区域,车辆之间发生碰撞的概率大大增加,必须做出交互行为的决策来避免发生碰撞,具有客观必要性;因此通过根据安全交互区域作行车交互区域,将交互区域缩小,有利于指导目标车辆的驾驶行为,从而避免了车辆发生碰撞事故;
13、交互区域的确定,有利于研究交互行为,提取交互特征,对后续研究车辆的意图辨识、轨迹预测、行为决策、风险态势评估以及路径规划等方面十分重要。
14、进一步的,所述车辆与车道参数信息包括自车道的目标车辆与自车道的前车的临界时距dt、目标车辆纵向长度l3;
15、确定所述广义交互区域的具体方法如下:
16、基于第一公式得到自车道的目标车辆与自车道的前车的相对车距d,所述第一公式为:d=cosαvvdt;
17、基于d、h建立广义交互区域,所述广义交互区域为矩形,所述矩形长为2d+l3,所述矩形宽为2h;优选的,所述自车道的目标车辆与自车道的前车的临界时距为6秒。
18、采用上一步的有益效果在于,采用自车道的目标车辆与自车道的前车的临界时距作为这种敏感性的指标;当两车车头时距小于临界值时,后车的运行受到前车的制约,也就是后车与前车能够产生交互作用。当两车车头时距大于临界值时,后车的运行不再受前车的影响,处于一个自由状态,驾驶员可以按自己的意愿采取其驾驶行为。
19、进一步的,所述安全交互区域包括横向安全交互区域、纵向安全交互区域。
20、进一步的,所述纵向安全交互区域为自车道的目标车辆与自车道的前车之间的扇形区域;所述扇形区域的半径等于目标车辆与当前车道前车的安全交互距离x1;
21、所述扇形区域通过以自车道的目标车辆前端中点为圆心,以x1为半径,与自车道两边界相交得到的区域,即为所述扇形区域,所述扇形区域位于目标车辆前端与自车道前车后端之间;优选的,所述纵向安全交互区域的扇形面积s为50m2;所述纵向安全交互区域为的扇形区域的夹角的角度为θ,θ=360s/(πx12)。
22、进一步的,所述车辆与车道参数信息还包括:α(ta)、td1、td2、trea、abmax、l0、l1、w;
23、所述α(ta)为目标车辆换道时目标车辆发生碰撞时的临界转向角;
24、所述w为目标车辆宽度;
25、所述td1为制动器调整时间;
26、所述td2为制动器制动力增长时间;
27、所述trea为驾驶员反应时间;
28、所述abmax为车辆纵向最大减速度;
29、所述l0为车间纵向最小安全距离;
30、所述l0为车间横向最小安全距离;
31、优选的,w选取1.6m-1.8m;所述目标车辆换道时,目标车辆发生碰撞时的临界转向角α(ta)≤15°,sinα(ta)≤0.2588;进一步优选的,α(ta)=15°,sinα(ta)=0.2588。
32、采用上一步的有益效果在于,实现安全交互区域是随车辆间的相对距离、相对速度、换道时间等因素动态变化的一个区域;当周围车辆刚刚进入目标车辆的广义交互区域时,目标车辆可以与周围车辆产生交互作用,在广义交互区域内具有主观选择性;当周围车辆进入目标车辆的安全交互区域,车辆之间发生碰撞的概率大大增加,必须做出交互行为的决策来避免发生碰撞,具有客观必要性。
33、进一步的,所述横向安全交互区域为自车道的目标车辆与目标车道的前车、目标车道的后车之间形成的五边形区域;所述五边形区域为由五条边线l1、l2、l3、l4、l5围成的区域;
34、所述l1位于以目标车辆中点为起点,以目标车辆的转向角α为水平方向夹角的第一射线上,所述第一射线与过目标车道前车后端中心的切线相交;
35、所述l2位于以目标车辆中点为起点,以目标车辆的转向角α为水平方向夹角的第二射线上,所述第二射线与过目标车道后车前端中心的切线相交;
36、所述l3位于过目标车道前车后端中心的切线上;
37、所述l4位于过目标车道后车前端中心的切线上;
38、所述l5位于过目标车道目标点且与目标车道边界线平行的直线上,所述目标点与目标车辆中点的距离为y,所述y记为目标车辆的横向安全交互距离;即所述目标车辆的横向安全交互距离为目标车辆到目标车道横向最小安全距离。
39、采用上一步有益效果在于,通过x1表示目标车辆与当前车道前车的安全交互距离,呈扇形区域,当两车距离越近,即扇形半径x1越小,扇形夹角θ就越大,所产生的影响系数权重就越大;x2表示目标车辆与目标车道前车的安全交互距离,x3表示目标车辆与目标车道后车的安全交互距离,y表示目标车辆与周围车辆的横向安全交互距离,共同表征的一个五边形区域,为目标车辆换道时的横向安全区域。
40、进一步的,特征在于,所述目标车辆的横向安全交互距离y通过以下公式五计算:
41、所述t为目标车辆换道持续时间;
42、所述边线l1的长度z1通过以下公式六计算:
43、z1=(x2+l3/2)/cosα
44、边线l2的长度z2通过以下公式七计算:
45、z2=(x3+l3/2)/cosα;
46、所述目标车辆与目标车道的前车纵向安全交互距离为x2;
47、所述目标车辆与目标车道的后车纵向安全交互距离为x3;所述目标车辆与当前车道前车的安全交互距离x1通过以下公式二计算:
48、
49、进一步的,所述目标车辆与目标车道的前车纵向安全交互距离为x2通过以下公式三计算:
50、
51、所述目标车辆与目标车道的前车纵向安全交互距离为x3通过以下第四公式计算:
52、
53、采用上一步的有益效果在于,将根据目标车辆实时速度与目标车道的前车、目标车道的后车的速度关系分为三类,实现全面分析于目标车辆与自车道的前车的距离、目标车辆与目标车道的前车的距离、目标车辆与目标车道的后车距离;从而三种临界碰撞情况,实现目标车辆换道成功。
54、本发明一个方面提供了一种行车交互区域的确定系统,包括:
55、预设的车辆安全数据库,所述车辆安全数据库包括车辆与车道参数信息;
56、实时数据获取模块,用于获取目标车道的前车纵向车速vtp、目标车道的后车纵向车速vtf;自车道的目标车辆实时车速vv、自车道的目标车辆的转向角α、自车道中线与目标车道边界的距离h;
57、广义交互区域判断模块,基于实时数据获取模块获取自车道的目标车辆实时车速vv、自车道的目标车辆的转向角α、自车道中线与目标车道边界的距离h,以及目标车辆纵向长度l3,确定广义交互区域;
58、周围车辆检测模块,用于实时检测广义交互区域内是否有车辆进入;
59、行车交互区域判断模块,当周围车辆检测模块未在广义交互区域内检测到车辆时,所述广义交互区域为行车交互区域;当周围车辆检测模块在在广义交互区域内检测到车辆时,安全交互区域为行车交互区域;
60、安全交互区域判断模块,基于实时数据获取模块获取自车道的目标车辆实时车速、自车道的目标车辆的转向角、目标车道的前车纵向车速、目标车道的后车纵向车速以及从车辆安全数据库获取的车辆与车道参数信息,确定安全交互区域。
61、进一步的,所述车辆与车道参数信息包括α(ta)、td1、td2、trea、abmax、l0、l1、w;
62、所述α(ta)为目标车辆换道时目标车辆发生碰撞时的临界转向角;
63、所述w为目标车辆宽度;
64、所述td1为制动器调整时间;
65、所述td2为制动器制动力增长时间;
66、所述trea为驾驶员反应时间;
67、所述abmax为车辆纵向最大减速度;
68、所述l0为车间纵向最小安全距离;
69、所述l1为车间横向最小安全距离;
70、和/或
71、所述广义交互区域判断模块的确定方法包括第一公式;所述第一公式:d=cosαvvdt;
72、d为自车道的目标车辆与自车道的前车的相对车距;所述dt为自车道的目标车辆与自车道的前车的时距;
73、所述广义交互区域判断模块基于d、h建立广义交互区域,所述广义交互区域为矩形,所述矩形长为2d+l3,所述矩形宽为2h;目标车辆位于矩形中心位置;所述l3为目标车辆纵向长度;
74、和/或
75、所述安全交互区域判断模块包括第二公式、公式三、公式四、公式五、公式六、公式七;
76、所述第二公式为:
77、
78、所述x1为目标车辆与当前车道前车的安全交互距离;
79、所述第三公式为:
80、
81、所述x2为目标车辆与目标车道的前车纵向安全交互距离;
82、所述第四公式为:
83、
84、所述x3为所述目标车辆与目标车道的后车纵向安全交互距离;所述第五公式为:
85、
86、所述y为目标车辆的横向安全交互距离;所述t为目标车辆换道持续时间;
87、所述公式六:z1=(x2+l3/2)/cosα
88、所述公式七:z2=(x3+l3/2)/cosα;
89、所述z1为横向安全交互区域的边线l1的长度;所述z2为横向安全交互区域的边线l2的长度。
90、与现有技术相比,本发明具有以下有益效果:基于广义交互区域判断模块过自车道的目标车辆实时车速、目标车辆的转向角、自车道中线与目标车道边界的距离h,实现广义交互区域从纵向与横向两个角度对广义交互区域范围的确定;
91、周围车辆检测模块判断广义交互区域内是否有车辆进入;将交互区域分为两种情况;当广义交互区域中没有车辆进入,广义交互区域为交互区域,从而驾驶人员处于一个相对自由状态,驾驶员可以按自己的意愿采取其驾驶行为,有利于避免交互区域过大导致的驾驶效率降低;
92、当周围车辆进入目标车辆的安全交互区域,车辆之间发生碰撞的概率大大增加,必须做出交互行为的决策来避免发生碰撞,具有客观必要性;因此通过根据安全交互区域作行车交互区域,将交互区域缩小,有利于指导目标车辆的驾驶行为,从而避免了车辆发生碰撞事故。
93、通过行车交互区域判断模块根据目标车辆实时速度与目标车道的前车、目标车道的后车的速度关系分为三类,通过公式二、三、四实现全面分析于目标车辆与自车道的前车的距离、目标车辆与目标车道的前车的距离、目标车辆与目标车道的后车距离;从而三种临界碰撞情况,实现目标车辆换道成功,不发生碰撞现象;
94、交互区域的确定,有利于研究交互行为,提取交互特征,对后续研究车辆的意图辨识、轨迹预测、行为决策、风险态势评估以及路径规划等方面十分重要。
- 还没有人留言评论。精彩留言会获得点赞!