车辆绕行的控制方法、装置及存储介质与流程
本技术涉及智能驾驶,尤其涉及一种车辆绕行的控制方法、装置及存储介质。
背景技术:
1、随着科技的不断发展,智能驾驶技术正在逐步成熟和应用。智能驾驶技术可以使人们的驾驶更加安全、舒适、便捷、高效,提高交通运输的效率和质量。而在城市中,常常有路边停车车辆、环卫车作业等情况占用车道,需绕行情况。
2、而自动驾驶车辆在行驶过程中若遇上交通事故或修路等原因导致无法自动规划路径时,车辆将被卡住无法前行,从而陷入困境,一般无法自动摆脱困境。
3、因此,如何解决自动驾驶车辆在此类场景中无法自动摆脱困境的问题,是亟需解决的问题。
技术实现思路
1、本技术提供了一种车辆绕行的控制方法、装置及存储介质,可以在车辆遇到障碍物时,能够重新规划路径,进行快速、安全地绕行。
2、一方面,本技术提供了一种车辆绕行的控制方法,所述方法包括:
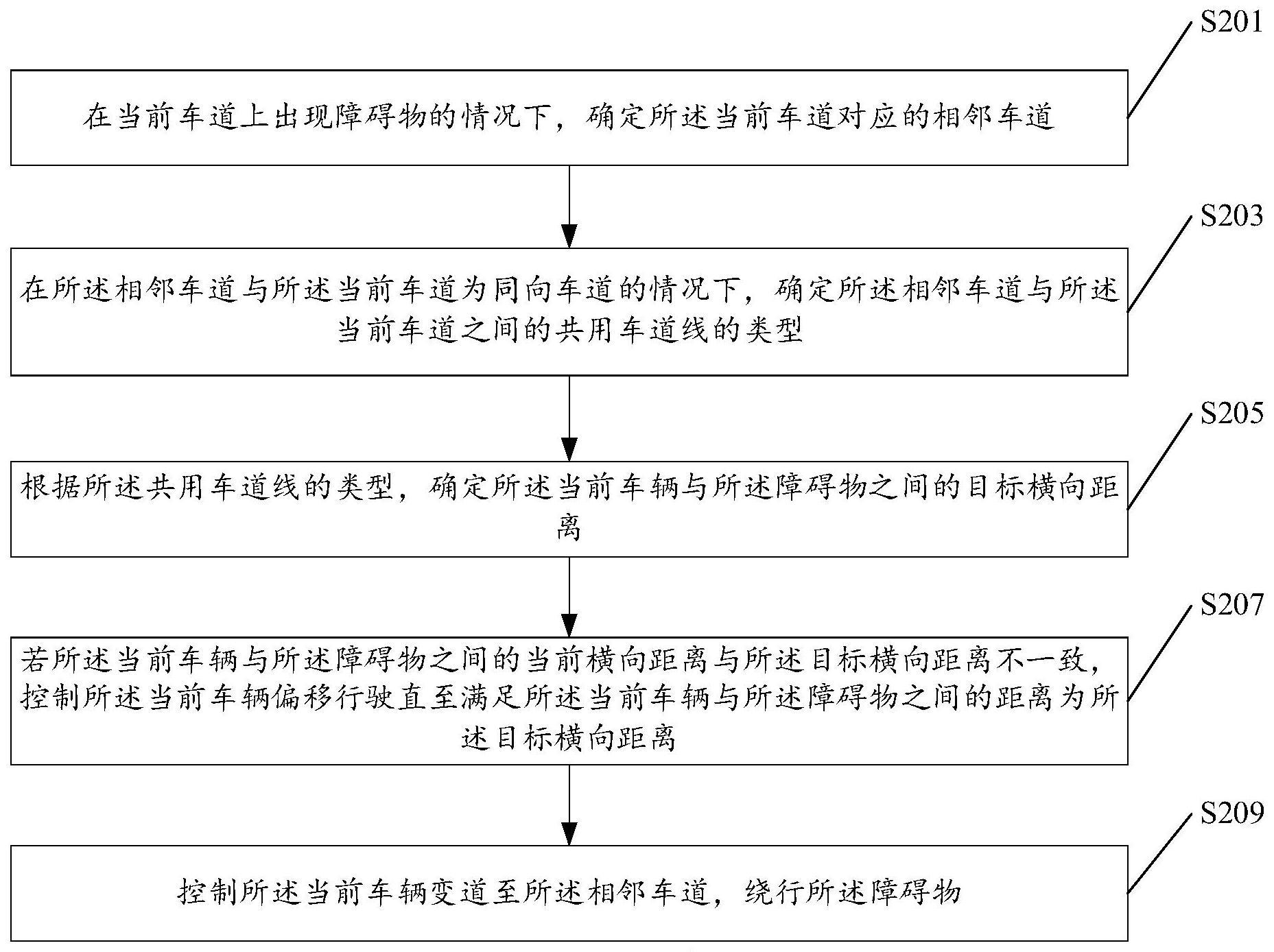
3、在当前车道上出现障碍物的情况下,确定所述当前车道对应的相邻车道;所述障碍物位于所述当前车道上当前车辆的行驶方向前方,且与所述当前车辆的距离小于或等于预设距离阈值;
4、在所述相邻车道与所述当前车道为同向车道的情况下,确定所述相邻车道与所述当前车道之间的共用车道线的类型;
5、根据所述共用车道线的类型,确定所述当前车辆与所述障碍物之间的目标横向距离;
6、若所述当前车辆与所述障碍物之间的当前横向距离与所述目标横向距离不一致,控制所述当前车辆偏移行驶直至满足所述当前车辆与所述障碍物之间的距离为所述目标横向距离;
7、控制所述当前车辆变道至所述相邻车道,绕行所述障碍物。
8、可选的,所述根据所述共用车道线的类型,确定所述当前车辆与所述障碍物之间的目标横向距离,包括:
9、在所述共用车道线的类型为虚线类型的情况下,确定所述当前车辆与所述障碍物之间的第一目标横向距离;所述第一目标横向距离大于或等于第一阈值;
10、在所述共用车道线的类型为实线类型的情况下,确定所述当前车辆与所述障碍物之间的第二目标横向距离;所述第二目标横向距离大于或等于第二阈值;所述第一阈值大于所述第二阈值。
11、可选的,所述控制所述当前车辆变道至所述相邻车道之前,所述方法还包括:
12、获取距离速度关联关系;所述距离速度关联关系表征预设距离与预设速度的对应关系;
13、根据所述距离速度关联关系,确定所述目标横向距离对应的第一绕行速度;
14、所述控制所述当前车辆变道至所述相邻车道,包括:
15、控制所述当前车辆以所述第一绕行速度变道至所述相邻车道。
16、可选的,所述方法还包括:
17、在所述相邻车道与所述当前车道为对向车道的情况下,确定所述当前车辆在所述相邻车道上的绕行位置以及绕行的第一时间;
18、确定所述相邻车道上目标车辆行驶至所述绕行位置的第二时间;所述目标车辆为所述相邻车道上逐渐靠近所述当前车辆的车辆;
19、确定所述第二时间与所述第一时间的时间差;
20、在所述时间差大于或等于第一时差阈值的情况下,控制所述当前车辆变道至所述相邻车道,绕行所述障碍物。
21、可选的,所述确定所述相邻车道上目标车辆行驶至所述绕行位置的第二时间之前,所述方法还包括:
22、判断所述相邻车道上是否存在逐渐靠近所述当前车辆的所述目标车辆;
23、在所述相邻车道上存在所述目标车辆的情况下,确定所述当前车辆与所述目标车辆的距离;
24、所述确定所述相邻车道上目标车辆行驶至所述绕行位置的第二时间,包括:
25、在所述当前车辆与所述目标车辆的距离在预设距离范围内的情况下,执行确定所述相邻车道上目标车辆行驶至所述绕行位置的第二时间。
26、可选的,所述在所述时间差大于或等于第一时差阈值的情况下,控制所述当前车辆变道至所述相邻车道,包括:
27、在所述时间差大于或等于所述第一时差阈值的情况下,获取所述当前车辆与所述目标车辆的距离;
28、根据所述当前车辆与所述目标车辆的距离,确定所述当前车辆的第二绕行速度;
29、控制所述当前车辆以所述第二绕行速度变道至所述相邻车道。
30、可选的,所述方法还包括:
31、在所述时间差小于所述第一时差阈值且大于第二时差阈值的情况下,控制所述当前车辆以目标速度变道至所述相邻车道;所述第一时差阈值大于所述第二时差阈值;
32、在所述时间差小于或等于所述第二时差阈值的情况下,控制所述当前车辆等待所述目标车辆通过所述绕行位置之后,变道至所述相邻车道。
33、可选的,所述方法还包括:
34、获取所述当前车辆在所述当前车道上的当前位置信息;
35、基于所述当前位置信息以及所述当前横向距离,判断所述当前车道上是否存在绕行空间;
36、在所述当前车道上存在绕行空间的情况下,控制所述当前车辆在所述当前车道上绕行所述障碍物;
37、所述控制所述当前车辆偏移行驶直至满足所述当前车辆与所述障碍物之间的距离为所述目标横向距离,包括:
38、在所述当前车道上不存在绕行空间的情况下,执行控制所述当前车辆偏移行驶直至满足所述当前车辆与所述障碍物之间的距离为所述目标横向距离。。
39、另一方面提供了一种车辆绕行的控制装置,所述装置包括:
40、相邻车道确定模块,用于在当前车道上出现障碍物的情况下,确定所述当前车道对应的相邻车道;所述障碍物位于所述当前车道上当前车辆的行驶方向前方,且与所述当前车辆的距离小于或等于预设距离阈值;
41、车道线类型确定模块,用于在所述相邻车道与所述当前车道为同向车道的情况下,确定所述相邻车道与所述当前车道之间的共用车道线的类型;
42、目标横向距离确定模块,用于根据所述共用车道线的类型,确定所述当前车辆与所述障碍物之间的目标横向距离;
43、偏移控制模块,用于若所述当前车辆与所述障碍物之间的当前横向距离与所述目标横向距离不一致,控制所述当前车辆偏移行驶直至满足所述当前车辆与所述障碍物之间的距离为所述目标横向距离;
44、绕行模块,用于控制所述当前车辆变道至所述相邻车道,绕行所述障碍物。
45、另一方面提供了一种车辆绕行的控制设备,所述设备包括处理器和存储器,所述存储器中存储有至少一条指令或至少一段程序,所述至少一条指令或所述至少一段程序由所述处理器加载并执行以实现如上所述的车辆绕行的控制方法。
46、另一方面提供了一种计算机存储介质,所述计算机存储介质存储有至少一条指令或至少一段程序,所述至少一条指令或至少一段程序由处理器加载并执行以实现如上所述的车辆绕行的控制方法。
47、本技术提供的车辆绕行的控制方法、装置及存储介质,具有如下技术效果:
48、本技术在当前车道上出现障碍物的情况下,确定当前车道对应的相邻车道;障碍物位于当前车道上当前车辆的行驶方向前方,且与当前车辆的距离小于或等于预设距离阈值;在相邻车道与当前车道为同向车道的情况下,确定相邻车道与当前车道之间的共用车道线的类型;根据共用车道线的类型,确定当前车辆与障碍物之间的目标横向距离;若当前车辆与障碍物之间的当前横向距离与目标横向距离不一致,控制当前车辆偏移行驶直至满足当前车辆与障碍物之间的距离为目标横向距离;控制当前车辆变道至相邻车道,绕行障碍物。本技术解决了自动驾驶车辆在遇到长时间静止的障碍物而无法自动摆脱困境的问题;提高了车辆的绕行成功率以及绕行安全性。
- 还没有人留言评论。精彩留言会获得点赞!