基于高速非奇异切换滑模的自主车辆路径跟踪控制方法
本发明属于自主车辆,尤其是在车辆避障弯道转向以及多变复杂路面工况下,保持良好的跟踪精度以及收敛速度的自主车辆路径跟踪控制方法。
背景技术:
1、作为自主车辆的关键技术之一,路径跟踪问题的目标是控制车辆准确地跟踪给定的参考路径,同时在车辆动力学模型和运动学模型的基础上,保持纵向以及横向稳定性。由于道路和行驶条件的复杂性,特别是极端工况下,车辆的路径跟踪控制性能显得尤为重要。
2、为了消除横向路径跟踪误差并保证车辆的稳定性,已有多种控制方法被采用,比如滑模控制、模型预测控制、pid控制以及模糊逻辑控制等。发明专利cn109318905a中,基于车辆的横向控制投影运动学模型,使用pid控制方法对车辆进行路径跟踪控制,但是该方法只考虑了车辆的运动学模型,忽略了当车辆运行于极端工况下时突出的动力学模型特性,不能有效的保证控制器的鲁棒性。另外公开号为cn109795502a的发明专利申请提出了基于模型预测控制的车辆路径跟踪控制算法,其考虑了车辆行驶过程中的安全性能、舒适性能以及经济性能但是该方法没有考虑到模型预测控制算法高昂的计算代价,难以得到实际的应用。
3、目前自主车辆路径跟踪控制的研究领域,普遍存在控制精度、控制稳定性以及模型建立准确度等问题,如何设计更好的控制器来克服以上问题,具有重要的实际意义。
技术实现思路
1、本发明要克服现有技术的上述缺点,提供一种自主车辆路径跟踪的控制方法,特别是当自主车辆路径跟踪过程中误差变化较大时,仍能保持良好的控制精度和控制稳定性,并且对模型参数的不确定性以及外界扰动具有一定的鲁棒性。
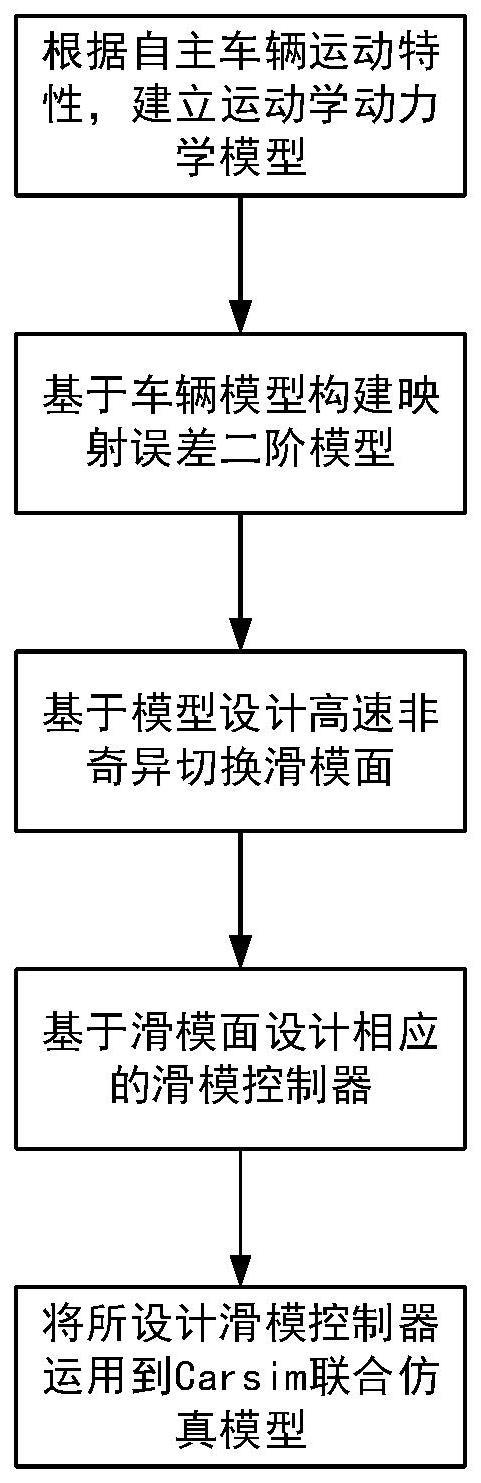
2、为了达到以上目的,本发明的技术方案为:一种高速非奇异切换滑模控制方法,包括如下步骤:
3、a:在车辆仿真软件carsim中建立一辆具有高保真度的车辆模型,设置其输入变量为前轮转角δfl、δfr以及后轮转角δrl、δrr;输出变量为车辆纵向与横向速度vx、vy;车辆纵向和横向加速度ax、ay;车辆航向角、横摆角速度以及侧滑角φ、γ、β;地面摩擦附着系数μ;路径曲率ρ以及车辆质心位于地面坐标系上的坐标点x0、y0;
4、b:基于车辆的实时位置信息x0以及上层轨迹规划控制器得到参考航向角与参考横向位移,再结合车辆的实时航向角和位置坐标,得到投影点的映射误差,推出车辆的运动学模型;
5、c:结合车辆的横向和纵向加速度以及车身结构参数得到作用于每个车轮上的垂直载荷的估计值,由此再加上车辆前后轴的标称转向刚度以及负载因数得到时变的非线性转向刚度;利用小角度近似法得到轮胎滑移角的简化表达式;最后结合上述公式得到车轮所受侧向力;
6、d:基于得到的车轮侧向力的估计值求出车辆的横摆角速度,并由此推出车辆的侧滑角,得到车辆的动力学模型;
7、e:由得到的车辆运动学模型和车辆动力学模型,推出关于投影点映射误差的二阶集总误差模型表达式,并由此设计高速非奇异切换滑模控制器;
8、f:根据得到的集总误差模型与系统的参考误差信号设计高速非奇异切换滑模面表达式,通过选取合适的参数,提高收敛速度与跟踪精度的同时保证了系统的鲁棒性;
9、g:设计控制器输入变量作为车辆的前轮转角输入信号,在该控制器作用下可以保证误差的有限时间收敛,并且使得该系统对于参数不确定性和外界扰动具有较好的鲁棒性。也就是说无人驾驶车辆能够保证有效地跟踪参考路径。
10、与现有技术相比,本发明具有如下优势:
11、1、综合考虑了车辆的运动学模型以及动力学模型,同时采用轮胎的魔术公式建立了较为精确的车辆模型,特别是当车辆行驶在极端工况下时,该模型能够很好的拟合车辆的非线性特性。
12、2、设计了一个高速非奇异切换滑模控制器,在一定程度上提高了控制的精度、降低了误差的收敛时间、有效抑制了系统的抖振现象,同时对于系统的参数不确定性和外界的干扰具有良好的鲁棒性。
技术特征:
1.一种基于高速非奇异切换滑模的自主车辆路径跟踪控制方法,具体包括如下步骤:
2.根据权利要求1所述的控制方法,其特征在于,步骤a中的车辆模型为四轮转向,后轮转向角度输入为零。
3.根据权利要求1所述的控制方法,其特征在于,步骤b具体包括如下步骤:
4.根据权利要求1所述的控制方法,其特征在于,步骤c具体包括如下步骤:
5.根据权利要求1所述的控制方法,其特征在于,步骤d中得到车辆的动力学模型如下:
6.根据权利要求1所述的控制方法,其特征在于,步骤e中得到的二阶误差模型如下:
7.根据权利要求1所述的控制方法,其特征在于,步骤f所述的下式滑模面表达式是:
8.根据权利要求1所述的控制方法,其特征在于,步骤g所述的控制器输入变量如下:
技术总结
一种无人驾驶车辆路径跟踪控制方法,包括:(A)在Carsim软件中建立高保真度车辆模型;(B)根据行驶时由传感器获得的实时数据信息建立车辆的运动学模型;(C)根据传感器数据以及车辆固有结构参数得到车轮所受侧向力的估计值;(D)根据得到的车轮侧向力估计值推导出车辆的横摆角速度以及侧滑角,以此建立车辆动力学模型;(E)结合车辆的运动学与动力学模型得到系统的二阶误差模型,并以此设计滑模控制器;(F)设计车辆前轮转角控制律。本发明的控制方法应用在无人驾驶车辆路径跟踪控制上,具有较高的精度以及较强的抗干扰性和鲁棒性。
技术研发人员:孙哲,李圣瑞,李志鹏,陈博
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!