一种新能源汽车制动控制系统的制作方法
本发明涉及新能源汽车制动控制,具体是一种新能源汽车制动控制系统。
背景技术:
1、现有的驾驶员的驾驶特性通常包括极速状态、正常状态和缓慢状态,驾驶员在极速状态下驾驶的特点是技巧高超,反应灵敏,时间紧迫,经常超车、加塞和急加速;驾驶员在正常状态下驾驶的特点是行驶标准且合理,符合日常行驶规律;驾驶员在缓慢状态下驾驶特点是行车速度缓慢且较少超车,不易产生危险行为,反应较迟钝。
2、现有新能源汽车自动制动系统的实现技术中,开发者往往根据车辆制动性能差异和交通路况差异,建立了不同行驶情况下的触发汽车自动制动时的最小安全距离模型,但该模型忽视了驾驶员状态的实时变化,缺少一般适应性。
3、现有技术中当触发汽车自动制动的最小安全距离选取较大时,汽车自动制动触发时机早,虽然符合缓慢状态驾驶员的心理预期,但极速状态驾驶员会认为汽车自动制动系统过早触发,影响其驾驶体验;
4、当触发汽车自动制动的最小安全距离选取较小时,汽车自动制动触发时机晚,符合极速状态驾驶员的心理预期,但缓慢状态驾驶员可能会主观认为汽车自动制动触发时机晚,容易可能引起其心理恐慌,产生其对汽车自动制动系统不信任;
5、所以如何选取合适最小安全距离以满足驾驶员的心理预期,以提高其对汽车自动制动系统的认可与信任是我们亟需解决的问题,现提供一种新能源汽车制动控制系统。
技术实现思路
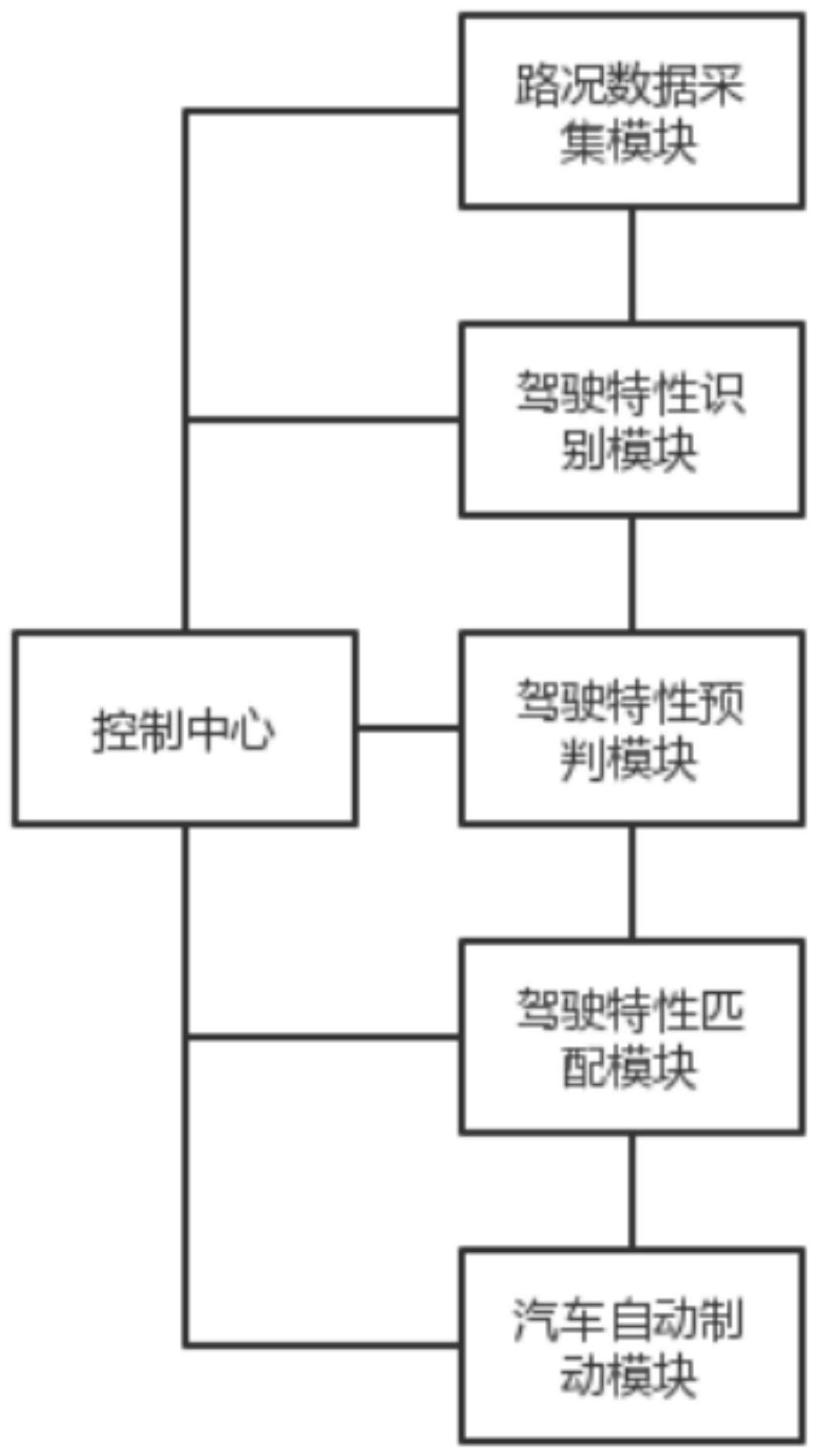
1、为了解决上述技术问题,本发明的目的在于提供一种新能源汽车制动控制系统,包括控制中心,所述控制中心通信连接有路况数据采集模块、驾驶特性识别模型、驾驶特性预判模块、驾驶特性匹配模型和汽车自动制动模块;
2、所述路况数据采集模块用于采集驾驶员的日常通勤路线,将日常通勤路段按照路况特性进行拆分,划分为若干通勤子路段;
3、所述驾驶特性识别模型用于获取通勤子路段的识别周期内驾驶员的行为特征集,所述行为特征集包括驾驶员的制动状态、驾驶急加速程度、平均车速、超车次数和加塞次数,根据所述行为特征集获取驾驶员在不同通勤子路段的驾驶特性;
4、所述驾驶特性预判模块用于构建驾驶特性预判模型,通过驾驶特性预判模型获取驾驶员下一识别周期的驾驶特性;
5、所述驾驶特性匹配模型用于将驾驶员的驾驶特性与汽车自动制动距离进行匹配,获取驾驶员在不同驾驶特性时汽车启动自动制动的最小安全距离;
6、所述汽车自动制动模块用于根据驾驶员的驾驶特性对汽车启动自动制动的触发条件进行实时控制和更新。
7、进一步的,所述路况数据采集模块采集驾驶员的日常通勤路线,将日常通勤路段按照路况特性进行拆分,划分为若干通勤子路段的过程包括:
8、采集驾驶员的日常通勤路线,通过gis手段获取日常通勤路线的行驶路况特性,将日常通勤路段按照路况特性进行拆分,划分为若干通勤子路段,所述路况特性包括城市路况、高速路况、郊区路况;
9、获取各通勤子路段的长度特征,根据各通勤子路段的路况特性和长度特征确定各通勤子路段的识别周期。
10、进一步的,所述驾驶特性识别模型用于获取通勤子路段的识别周期内驾驶员的行为特征集,所述行为特征集包括驾驶员的制动状态、驾驶急加速程度、平均车速、超车次数和加塞次数,根据所述行为特征集获取驾驶员在不同通勤子路段的驾驶特性的过程包括:
11、获取各通勤子路段的识别周期以及各通勤子路段识别周期内的行为特征集;
12、将各通勤子路段的识别周期内的行为特征集中的各项行为特征进行数据格式预处理,对数据格式预处理后的各项行为特征进行加权平均处理获得各通勤子路段的驾驶特性系数,根据驾驶特性系数判断驾驶员在各通勤子路段的驾驶特性;所述驾驶特性包括极速状态、正常状态和缓慢状态。
13、进一步的,所述驾驶特性识别模型获取各通勤子路段的驾驶员的制动状态的过程包括:
14、通过传感器终端获取驾驶员行驶的车辆与前车的车速和间隔距离,当驾驶员行驶的车辆与前车间隔距离减小时,利用大数据方法获取车辆的紧急刹车系数、正常刹车系数和平缓刹车系数,根据车辆的紧急刹车系数、正常刹车系数和平缓刹车系数和当前车速分别获取车辆从当前车速降低至零时的紧急停车距离d1、正常停车距离d2和平缓停车距离d3;
15、获取驾驶员行驶的车辆与前车的最小安全距离d4,根据所述紧急停车距离d1、正常停车距离d2和平缓停车距离d3分别获取车辆的紧急制动距离(d1+d4)、正常制动距离(d2+d4)和平缓制动距离(d3+d4);
16、获取驾驶员进行制动动作时与前车的间隔距d0,将驾驶员采取制动动作时与前车的间隔距d0与所述紧急制动距离(d1+d4)、正常制动距离(d2+d4)和所述平缓制动距离(d3+d4)进行比较;
17、当(d1+d4)≤d0<(d2+d4)时,将驾驶员的制动状态标记为自信状态;
18、当(d2+d4)≤d0≤(d3+d4)时,将驾驶员的制动状态标记为正常状态;
19、当d0>(d3+d4)时,将驾驶员的制动状态标记为谨慎状态;
20、获取各通勤子路段的驾驶员的制动状态分别为自信状态、正常状态和谨慎状态的出现次数,将各通勤子路段中出现次数最多的制动状态标记为各通勤子路段的驾驶员的制动状态。
21、进一步的,所述驾驶特性识别模型获取驾驶员在各通勤子路段的驾驶急加速程度的过程包括:
22、获取驾驶员行驶在通勤子路段识别周期内不同时刻的加速度a(t),并利用大数据方法获取驾驶员行驶的通勤子路段所属路况特性下的加速度平均值根据所述加速度a(t)和所述加速度平均值获取驾驶员行驶在通勤子路段识别周期内不同时刻的加速度方差var(t),根据所述加速度a(t)、所述加速度平均值和所述加速度方差var(t)获取驾驶员行驶在通勤子路段识别周期内的驾驶急加速程度系数;
23、对通勤子路段若干识别周期内的驾驶急加速程度系数进行加权平均计算获得通勤子路段的平均驾驶急加速程度系数,根据通勤子路段的平均驾驶急加速程度系数判断驾驶员在各通勤子路段的驾驶急加速程度。
24、进一步的,所述驾驶特性预判模块构建驾驶特性预判模型,通过驾驶特性预判模型获取驾驶员下一识别周期的驾驶特性的过程包括:
25、基于深度学习网络构建驾驶特性预判模型,根据各通勤子路段驾驶员的历史行为特征集、历史驾驶特性和各通勤子路段所属路况特性构建历史数据集,并将所述历史数据集划分为训练集和测试集,通过训练集对驾驶特性预判模型进行实时学习训练,直至损失函数训练平稳,并保存模型参数,之后通过测试集对迭代训练后的驾驶特性预判模型的输出数据矩阵进行相似度验证;
26、将当前识别周期内获取的驾驶员的行为特征集和驾驶员行驶的通勤子路段所属路况特性进行数据格式预处理,并输入通过测试集验证的驾驶特性预判模型中,根据驾驶特性预判模型的输出层获取下一识别周期内的驾驶员的驾驶特性。
27、进一步的,驾驶特性匹配模型将驾驶员的驾驶特性与汽车自动制动距离进行匹配,获取驾驶员在不同驾驶特性时汽车启动自动制动的最小安全距离的过程包括:
28、通过传感器终端获取驾驶员行驶的车辆与前车的车速和间隔距离,当驾驶员行驶的车辆与前车间隔距离减小时,获取车辆的紧急刹车系数、正常刹车系数和平缓刹车系数以及车辆从当前速度降低至零时的紧急停车距离d1、正常停车距离d2和平缓停车距离d3;
29、获取驾驶员行驶的车辆与前车的最小安全距离d4,以及车辆的紧急制动距离(d1+d4)、正常制动距离(d2+d4)和平缓制动距离(d3+d4);
30、当驾驶员的驾驶特性为极速状态时,设置车辆进行自动制动的最小安全距离为(d1+d4);
31、当驾驶员的驾驶特性为正常状态时,设置车辆进行自动制动的最小安全距离为(d2+d4);
32、当驾驶员的驾驶特性为缓慢状态时,设置车辆进行自动制动的最小安全距离为(d3+d4)。
33、进一步的,所述汽车自动制动模块根据驾驶员的驾驶特性对汽车启动自动制动的触发条件进行实时控制和更新的过程包括:
34、当驾驶员行驶的车辆与前车间隔距离减小时,获取此时驾驶员的驾驶特性以及车辆进行自动制动的最小安全距离,在驾驶员行驶的车辆与前车间隔距离达到最小安全距离前,向驾驶员发送减速制动警报,直至驾驶员行驶的车辆与前车间隔距离增大或驾驶员行驶的车辆速度为零;
35、在驾驶员行驶的车辆与前车间隔距离达到最小安全距离前,当驾驶员有踩油门踏板动作时,根据最小安全距离和驾驶员当前行驶的车辆速度获取自动刹车系数,根据自动刹车系数启动自动刹车;
36、当驾驶员行驶的车辆与前车间隔距离达到最小安全距离且驾驶员无制动动作时,根据最小安全距离和驾驶员当前行驶的车辆速度获取自动刹车系数,根据自动刹车系数启动自动刹车。
37、与现有技术相比,本发明的有益效果是:采集汽车日常通勤路线,记录驾驶员在通勤路线上不同子路段的驾驶行为特征,根据所述行为特征集获取驾驶员在不同通勤子路段的驾驶特性,并将驾驶员的驾驶特性与汽车自动制动距离进行匹配,获取驾驶员在不同驾驶特性时汽车启动自动制动的最小安全距离,并构建驾驶特性预判模型,通过驾驶特性预判模型获取驾驶员下一识别周期的驾驶特性,实时对驾驶员行驶时汽车进行自动制动的最小安全距离进行更新,使触发汽车自动制动的最小安全距离随着驾驶员的驾驶特性实时改变,使每当触发汽车自动制动的最小安全距离都符合驾驶员的心理预期,显著提高驾驶员对汽车自动制动系统的认可与信任程度。
- 还没有人留言评论。精彩留言会获得点赞!