并道灯光警示系统、方法及车辆与流程
本发明涉及汽车主动安全,特别涉及一种并道灯光警示系统、方法及车辆。
背景技术:
1、在现有的汽车主动安全系统中,汽车信号灯扮演了重要的角色,它是驾驶者预防交通事故的极为重要的工具。
2、目前,现有技术中存在可以根据摄像头和转角信号动态调节的智能矩阵灯光照明系统,在车辆转弯的时候,灯光覆盖的范围更加广;而在夜间行驶的时候,若遇到会车场景,可以自动切换远景灯光,这样在不给对方车辆造成远光眩光的情况下,自身车辆驾驶员能够获得最佳视野。这些智能车灯系统在预警方面同样发挥了很大的作用,例如在基础的制动、转向以及倒车提醒的基础上,还发展了行人探测与防撞警示系统和变道提醒系统等。
3、在车辆进行变道的时候,驾驶员一般会根据待变道方向一侧的车辆信息来合理的选择变道时机,例如:要向左侧车道并道,变道车辆驾驶员首先会打向左转向灯提醒后方车辆,再根据左侧后视镜的车流状况选择合理的变道时机,一般会选择在左侧车道后方无车辆或者后方存在车辆但是距离较远的时候进行变道。但是,后视镜所能看到的后侧距离有限,在变道的目标车道后方有车的情况下,变道车辆驾驶员很难估计出后方车辆的速度。
4、在自身车辆处于变道车辆的目标车道上,并且以高于变道车辆的速度行驶时,很有可能存在与变道车辆发生碰撞的风险。即变道车辆驶入目标车道上的自身车辆前面的空间时,存在发生碰撞的潜在危险,特别是当变道车辆以低于自身车辆的速度进行变道的时候,很可能发生碰撞导致交通事故。实现中,针对这一情况,自身车辆驾驶员可以通过控制矩阵灯光的快速闪烁来提醒变道车辆的驾驶员,让变道车辆的驾驶员能从后视镜感受到变道风险的存在,以促使其放弃并道超车的行为;但是这对自身车辆驾驶员的反应速度要求很高,特别是在车辆高速行驶的时候,会对驾驶安全产生极大的干扰。因此,为了减轻对驾驶员的行车负担,降低由其他车辆变道带来的碰撞风险,需要一种主动的安全技术来实现。
技术实现思路
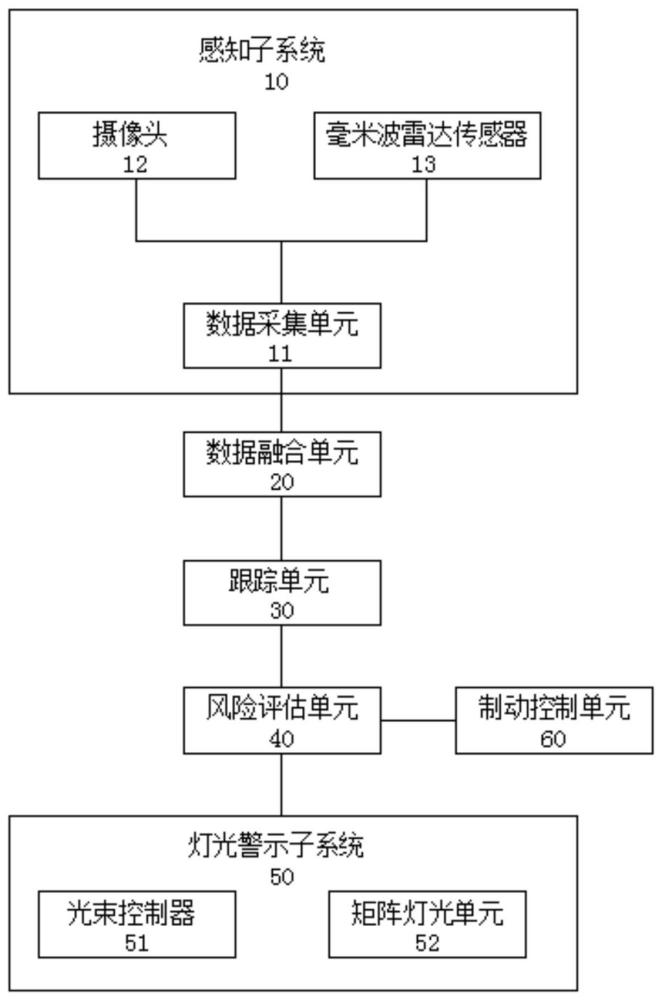
1、为了解决上述技术问题,本发明提供了一种并道灯光警示系统,包括安装在车辆上的感知子系统、数据融合单元、跟踪单元、风险评估单元和灯光警示子系统;
2、所述感知子系统用于采集车辆行驶方向道路上行驶车辆的行车数据;
3、所述数据融合单元用于对行车数据进行处理,判断邻近车道是否存在变道车辆;
4、所述跟踪单元用于以变道车辆为目标车辆,通过获取目标车辆的行车数据对其进行路线跟踪;
5、所述风险评估单元用于根据目标车辆的路线跟踪情况,判断与目标车辆是否存在碰撞风险;
6、所述灯光警示子系统用于当风险评估单元判断目标车辆存在碰撞风险时发出灯光警示。
7、可选的,所述感知子系统包括数据采集单元以及与数据采集单元连接的感知单元,所述感知单元包括摄像头和毫米波雷达传感器;
8、所述摄像头采用单目摄像头或者双目摄像头,用于检测道路上的车道信息和行驶车辆;
9、所述毫米波雷达传感器用于测量行驶车辆的距离、速度和角度。
10、可选的,所述数据融合单元采用多源信息融合技术对行车数据进行处理,具体方式如下:
11、结合车道线信息确定邻近车道的行驶车辆,以邻近车道行驶车辆的行车数据作为选定数据;
12、对选定数据进行预处理;
13、对预处理后的选定数据进行特征抽取;
14、根据特征抽取结果确定邻近车道是否存在变道车辆。
15、可选的,所述跟踪单元对目标车辆进行路线跟踪的方式如下:
16、根据目标车辆的行车数据对目标车辆进行定位;
17、根据目标车辆的定位,结合目标车辆的速度和角度,对目标车辆并道进行时序预测;
18、根据时序预测模拟绘制目标车辆的时序路线图。
19、可选的,所述风险评估单元判断与目标车辆是否存在碰撞风险的方式如下:
20、获取车辆当前的行车速度;
21、根据车辆当前的行车速度进行时序预测,模拟绘制车辆的时序路线图;
22、将车辆的时序路线图与目标车辆的时序路线图进行时序拟合,根据时序拟合若在同一时点车辆与目标车辆将出现在本车道同一位置,则表示车辆与目标车辆存在碰撞风险。
23、可选的,所述灯光警示子系统包括光束控制器和矩阵灯光单元;
24、所述光束控制器用于当风险评估单元判断目标车辆存在碰撞风险时,向矩阵灯光单元发出激活信号;
25、所述矩阵灯光单元用于根据光束控制器的激活信号,对相应的目标车辆进行灯光警示。
26、可选的,所述灯光警示子系统的灯光警示方式如下:
27、判断有碰撞风险的目标车辆所在的车道信息位于车辆的两侧相邻车道、左侧相邻车道或者右侧相邻车道,相应地分别采用车辆两侧、左侧或者右侧的矩阵灯光单元对相应的目标车辆进行灯光警示。
28、可选的,所述风险评估单元连接有制动控制单元,当风险评估单元判断存在目标车辆有碰撞风险时,所述制动控制单元用于确定避免碰撞的制动减速量并根据制动减速量控制车辆实施减速。
29、本发明还提供了一种并道灯光警示方法,采用上述的并道灯光警示系统,包括以下步骤:
30、s100通过车辆的感知子系统采集车辆行驶方向道路上行驶车辆的行车数据;
31、s200对行车数据进行处理,判断邻近车道是否存在变道车辆;
32、s300以变道车辆作为目标车辆,通过获取目标车辆全部的行车数据对其进行路线跟踪;
33、s400根据目标车辆的路线跟踪情况,判断车辆与目标车辆是否存在碰撞风险;
34、s500若存在碰撞风险,则发出灯光警示。
35、可选的,在s100步骤中,道路上行驶车辆的行车数据包括道路上的车道信息、行驶车辆以及行驶车辆的距离、速度和角度。
36、可选的,在s200步骤中,采用多源信息融合技术对行车数据进行处理,以判断邻近车道是否存在变道车辆,具体包括:
37、s210结合车道线信息确定邻近车道的行驶车辆,以邻近车道行驶车辆的行车数据作为选定数据;
38、s220对选定数据进行预处理;
39、s230对预处理后的选定数据进行特征抽取;
40、s240根据特征抽取结果确定邻近车道是否存在变道车辆。
41、可选的,在s300步骤中,所述路线跟踪的具体方式如下:
42、s310根据目标车辆的行车数据对目标车辆进行定位;
43、s320根据目标车辆的定位,结合目标车辆的速度和角度,对目标车辆并道进行时序预测;
44、s330根据时序预测模拟绘制目标车辆的时序路线图。
45、可选的,在s400步骤中,判断与目标车辆是否存在碰撞风险的方式如下:
46、s410获取车辆当前的行车速度;
47、s420根据车辆当前的行车速度进行时序预测,模拟绘制车辆的时序路线图;
48、s430将车辆的时序路线图与目标车辆的时序路线图进行时序拟合,根据时序拟合若在同一时点车辆与目标车辆将出现在本车道同一位置,则表示车辆与目标车辆存在碰撞风险。
49、可选的,在s500步骤中,所述灯光警示包括使用远近灯光快速交替闪烁对相应的目标车辆进行警示。
50、可选的,在s500步骤中,灯光警示的方式如下:
51、s510确定存在碰撞风险的目标车辆;
52、s520判断有碰撞风险的目标车辆是否分布于两侧的相邻车道,若是则执行s530,若不是则执行s540;
53、s530车辆的两侧使用远近灯光快速交替闪烁进行警示;
54、s540判断有碰撞风险的目标车辆处于左侧相邻车道,若是则执行s550,若不是则执行s560;
55、s550车辆的左侧使用远近灯光快速交替闪烁进行警示;
56、s560判断有碰撞风险的目标车辆处于右侧相邻车道,若是则执行s570,若不是则执行s510;
57、s570车辆的右侧使用远近灯光快速交替闪烁进行警示。
58、可选的,在s500步骤中,若存在碰撞风险,则确定避免碰撞的制动减速量,并根据制动减速量控制车辆实施减速。
59、本发明还提供了一种车辆,所述车辆安装有上述的并道灯光警示系统。
60、本发明提供的并道灯光警示系统、方法及车辆,通过实时监测行驶方向道路上行驶车辆的行车数据,确定相邻(邻近)车道是否存在其他交通参与者,并且判断其他交通参与者中是否存在变道车辆,以变道车辆为目标车辆进行跟踪,判断是否存在碰撞风险,如存在碰撞风险则发出灯光警示,例如快速自动打开矩阵光束使其交替闪烁,警告变道车辆,有效提醒变道车辆的驾驶员,使其放弃危险并道行为,减少了对自身驾驶员的反应速度要求,从而降低了碰撞风险,提高了驾驶安全;另外,通过判断确定变道车辆作为目标车辆,可以降低后续跟踪与评估的数据处理量,提高数据处理速度,缩短反应时间,从而进一步提高车辆行驶的安全性。
61、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
62、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!