智能驾驶决策方法、装置、存储介质和车辆与流程
本文涉及智能驾驶领域技术,尤指一种智能驾驶决策方法、装置、存储介质和车辆。
背景技术:
1、目前发生的许多事故中通常被认定为是人类驾驶人员错误的感知和错误的决策造成的,因此准确的风险评估对于防止事故的发生至关重要,所以自动驾驶被认为可以大大减少此类错误的发生。基于规则的自动驾驶技术采用模块化分层结构,包括感知、定位、预测、规划、控制等模块,各模块具有一定的独立性,算法之间和算法内部可解释性强,可极为高效的分析和处理异常状态,目前的自动驾驶系统已经成功的应用在真实简单环境中进行路径寻找和障碍物探测。但是在复杂交互场景下,交通参与者通常包括自动驾驶车辆、人类驾驶车辆、行人等,对于不同的交通参与者的行为充满着不确定性,并且各个交通参与者之间也存在着强耦合的相互作用,分别存在相互影响的行为,给自动驾驶的行为决策及安全性带来了巨大的挑战。
技术实现思路
1、本申请提供了一种智能驾驶决策方法、装置、存储介质和车辆,提高了复杂交互的道路交通环境中的行车安全性。
2、本申请提供了一种智能驾驶决策方法,包括:
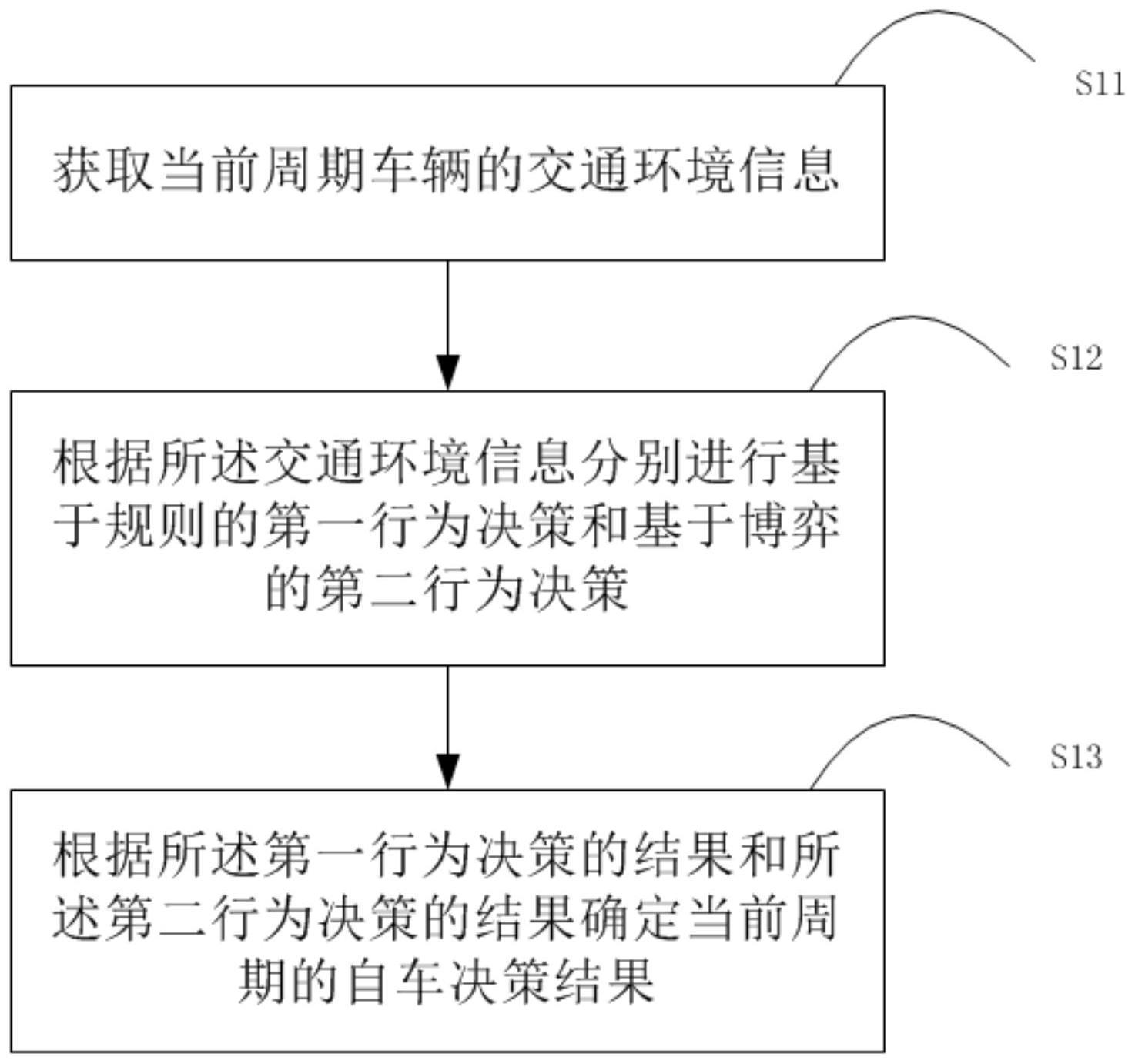
3、获取当前周期车辆的交通环境信息;其中,所述车辆的交通环境信息包括道路环境信息、自车状态和他车状态;
4、根据所述交通环境信息分别进行基于规则的第一行为决策和基于博弈的第二行为决策;
5、根据所述第一行为决策的结果和所述第二行为决策的结果确定当前周期的自车决策结果。
6、一种示例性的实施例中,所述根据所述第一行为决策的结果和所述第二行为决策的结果确定当前周期的自车决策结果,包括:
7、根据所述第一行为决策的结果和所述第二行为决策的结果确定当前周期的第一收益因子和第二收益因子;
8、根据所述当前周期的第一收益因子和第二收益因子确定所述当前周期的自车决策结果。
9、一种示例性的实施例中,所述根据所述第一行为决策的结果和所述第二行为决策的结果确定当前周期的第一收益因子和第二收益因子,包括:
10、根据所述第一行为决策的结果和预设的收益函数确定当前周期的第一收益;
11、根据所述第二行为决策的结果和所述预设的收益函数确定当前周期的第二收益;
12、根据所述当前周期的第一收益、所述当前周期的第二收益以及预设的神经网络模型确定所述当前周期的第一收益因子和第二收益因子。
13、一种示例性的实施例中,所述根据所述当前周期的第一收益、所述当前周期的第二收益以及预设的神经网络模型确定当前周期的第一收益因子和第二收益因子,包括:
14、获取所述当前场景的初始收益因子集;所述当前场景的初始收益因子集包括第一收益因子的初始值和第二收益因子的初始值;
15、重复进行如下操作,直到最优收益因子达到稳定收敛:
16、将所述当前周期的第一收益、所述当前周期的第二收益、所述当前场景的初始收益因子集输入到所述预设的神经网络模型;通过所述预设的神经网络模型求解出最优收益因子;
17、根据所述当前周期的第一收益、所述当前周期的第二收益和所述最优收益因子确定中间过程的融合收益;
18、根据所述中间过程的融合收益和前一个周期的融合收益中的较大融合收益所对应的收益因子修正所述当前场景的初始收益因子集;
19、根据达到稳定收敛的最优收益因子确定所述当前周期的第一收益因子和第二收益因子。
20、一种示例性的实施例中,所述预设的收益函数包括速度收益、安全收益和变道需求收益。
21、一种示例性的实施例中,按照如下方式获取所述当前场景的初始收益因子集:
22、根据当前周期车辆的交通环境信息确定当前场景;
23、根据所述当前场景、预设的场景和初始收益因子集的对应关系确定所述当前场景的初始收益因子集。
24、一种示例性的实施例中,所述根据所述当前周期的第一收益因子和第二收益因子确定当前周期的自车决策结果,包括:
25、根据所述当前周期的第一收益、所述当前周期的第二收益、所述当前周期的第一收益因子和第二收益因子确定当前周期的融合收益;
26、根据所述当前周期的融合收益确定所述当前周期的自车决策结果。
27、本申请还提供了一种智能驾驶决策装置,包括获取模块、独立决策模块和融合决策模块;
28、所述获取模块,设置为获取当前周期车辆的交通环境信息;其中,所述车辆的交通环境信息包括道路环境信息、自车状态和他车状态;
29、所述独立决策模块,设置为根据所述交通环境信息分别进行基于规则的第一行为决策和基于博弈的第二行为决策;
30、所述融合决策模块,设置为根据所述第一行为决策的结果和所述第二行为决策的结果确定当前周期的自车决策结果。
31、本申请还提供了一种计算机可读存储介质,存储有计算机可执行指令,其中,所述计算机可执行指令用于使所述计算机执行上述的方法。
32、本申请还提供了一种车辆,包括上述的智能驾驶决策装置或者执行上述的方法。
33、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
技术特征:
1.一种智能驾驶决策方法,其特征在于,包括:
2.根据权利要求1所述的智能驾驶决策方法,其特征在于,
3.根据权利要求2所述的智能驾驶决策方法,其特征在于,
4.根据权利要求3所述的智能驾驶决策方法,其特征在于,
5.根据权利要求3所述的智能驾驶决策方法,其特征在于,
6.根据权利要求4所述的智能驾驶决策方法,其特征在于,
7.根据权利要求4所述的智能驾驶决策方法,其特征在于,
8.一种智能驾驶决策装置,其特征在于,包括获取模块、独立决策模块和融合决策模块;
9.一种计算机可读存储介质,存储有计算机可执行指令,其中,所述计算机可执行指令用于使所述计算机执行权利要求1-7中任一项所述的方法。
10.一种车辆,其特征在于:包括权利要求8所述的智能驾驶决策装置或者执行权利要求1-7中任一项所述的方法。
技术总结
一种智能驾驶决策方法、装置、存储介质和车辆,该智能驾驶决策方法包括:获取当前周期车辆的交通环境信息;其中,所述车辆的交通环境信息包括道路环境信息、自车状态和他车状态;根据所述交通环境信息分别进行基于规则的第一行为决策和基于博弈的第二行为决策;根据所述第一行为决策的结果和所述第二行为决策的结果确定当前周期的自车决策结果。解决了不同的交通参与者的行为的不确定性以及各个交通参与者之间的强耦合的相互作用给自动驾驶的行为决策及安全性带来了巨大的挑战的技术问题,提高了复杂交互的道路交通环境中的行车安全性。
技术研发人员:衡阳,江典龙,梁振宝,周熙钦,杜濠杰,刘烨
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!