车辆的控制方法及装置、电子设备、存储介质与流程
本技术涉及车辆控制,具体涉及一种车辆的控制方法及装置、电子设备、计算机可读存储介质、以及计算机程序产品。
背景技术:
1、具有分布式驱动系统的车辆是指车辆的四个车轮可以分别独立驱动,分布式驱动的车辆具有通过性好、效率高、操纵性佳等优点,但是分布式驱动车辆的控制也是其中的难点,分布式驱动系统改善车辆的操纵稳定性,主要是通过施加附加横摆力矩来实现,而所施加的附加横摆力矩,需要同时考虑车辆的操纵性及稳定性。在一般的控制系统中,通过估算路面附着系数来约束期望横摆角速度,从而约束附加横摆力矩,使得车辆不会因为过大的附加横摆力矩而产生失稳,从而在操纵性与稳定性之间得到一个平衡。但是,实际应用中,路面附着系数的估算往往难以达到较好的精度,从而使得这样的车辆操纵稳定性控制无法实现良好的效果,严重的影响用户的使用体验。
技术实现思路
1、为解决上述对分布式的车辆的控制在操纵性和稳定性之间无法平衡的问题,本技术的实施例提供了一种车辆的控制方法及装置、电子设备、计算机可读存储介质以及计算机程序产品。
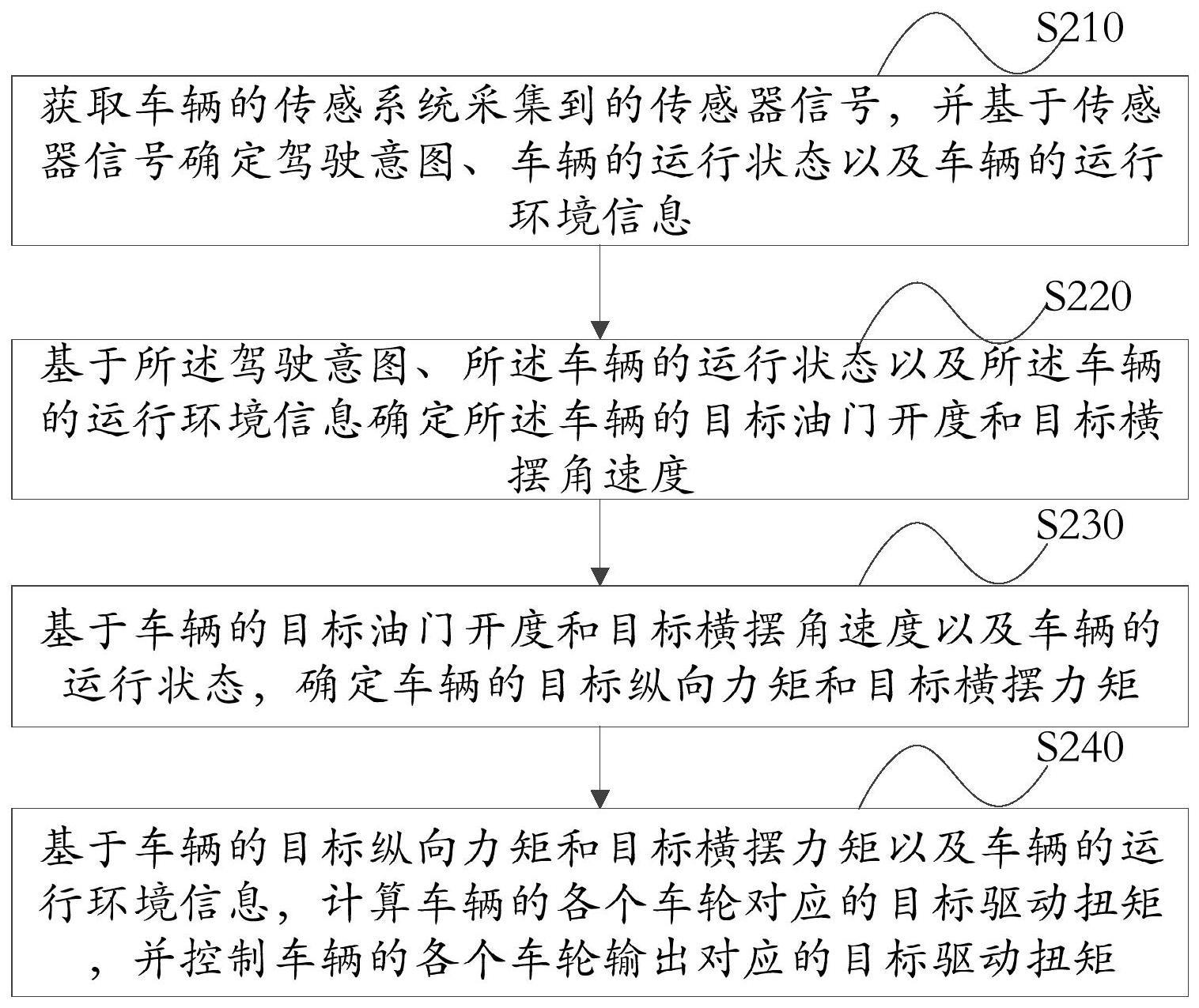
2、根据本技术实施例的一个方面,提供了一车辆的控制方法,包括:获取所述车辆的传感系统采集到的传感器信号,并基于所述传感器信号确定驾驶意图、车辆的运行状态以及车辆的运行环境信息;基于所述驾驶意图确定所述车辆的目标油门开度和目标横摆角速度;基于所述车辆的目标油门开度和目标横摆角速度以及所述车辆的运行状态,确定车辆的目标纵向力矩和目标横摆力矩;基于所述车辆的目标纵向力矩和目标横摆力矩以及所述车辆的运行环境信息,计算所述车辆的各个车轮对应的目标驱动扭矩,并控制所述车辆的各个车轮输出对应的目标驱动扭矩。
3、根据本技术实施例的一个方面,所述驾驶意图包括所述车辆的车速以及所述车辆的方向盘转角,所述方法还包括:
4、基于所述车辆的车速、所述车辆的方向盘转角、所述车辆的运行状态以及所述车辆的运行环境信息确定所述车辆的驾驶期望横摆角速度;
5、获取所述车辆的质心侧偏角,基于所述车辆的质心侧偏角以及所述车辆的驾驶期望横摆角速度,确定所述车辆的目标横摆角速度。
6、根据本技术实施例的一个方面,所述车辆的车速包括所述车辆的横向加速度;所述基于所述车辆的车速、所述车辆的方向盘转角、所述车辆的运行状态以及所述车辆的运行环境信息确定所述车辆的驾驶期望横摆角速度,包括:基于所述道路曲率、所述道路坡道以及所述道路表面附着力,确定所述车辆的第一期望横摆角速度;获取所述车辆的稳定性参数,基于所述车辆的横向加速度、所述车辆的运行状态以及所述车辆的稳定性参数,确定算所述车辆的第二期望横摆角速度;基于所述车辆的第一期望横摆角速度、所述车辆的第二期望横摆角速度以及所述车辆的方向盘转角确定所述车辆的驾驶期望横摆角速度。
7、根据本技术实施例的一个方面,所述基于所述道路曲率、道路坡道以及道路表面附着力确定所述车辆的第一期望横摆角速度,包括:基于所述道路曲率和道路坡道确定所述车辆运行环境的安全系数;基于所述道路表面的附着力确定所述车辆运行环境的摩擦系数;基于所述车辆运行环境的安全系数、摩擦系数以及所述车辆的横向加速度计算所述车辆的第一期望横摆角速度。
8、根据本技术实施例的一个方面,所述获取所述车辆的稳定性参数,基于所述车辆的运行状态以及所述车辆的稳定性参数,确定算所述车辆的第二期望横摆角速度,包括:根据所述车辆的属性参数确定所述车辆的初始稳定性参数,其中,属性参数包括:所述车辆的质量、轮端轴距、车辆的前后轮到质心的距离以及车辆的前后轴偏刚度;根据所述车辆的运行状态确定所述车辆稳定状态的调节因子;根据所述车辆稳定状态的调节因子对所述初始稳定性参数进行调节,得到所述车辆的稳定性参数;根据所述车辆的稳定性参数、所述车辆的横向加速度、所述车辆的轴距以及所述车辆的方向盘角度,确定所述车辆的第二期望横摆角速度。
9、根据本技术实施例的一个方面,所述基于所述车辆的质心侧偏角以及所述车辆的驾驶期望横摆角速度,确定所述车辆的目标横摆角速度,包括:若所述当前时刻车辆的质心侧偏角未达到预设质心侧偏角阈值以上,则将所述驾驶期望横摆角速度作为目标横摆角速度;若所述当前时刻车辆的质心侧偏角达到所述预设质心侧偏角阈值以上,则计算在保持所述当前时刻车辆的质心侧偏角不变的情况下,所述车辆的横摆角速度目标值;基于所述车辆的横摆角速度目标值以及所述驾驶期望横摆角速度计算所述车辆的目标横摆角速度。
10、根据本技术实施例的一个方面,所述基于所述车辆的目标纵向力矩和目标横摆力矩以及所述车辆的运行环境信息,计算所述车辆的各个车轮对应的目标驱动扭矩,并控制所述车辆的各个车轮输出对应的目标驱动扭矩,包括:基于所述车辆运行环境信息中的路面附着系数、坡道信息,计算在保证所述车辆的各个车轮的最大附着力度下,所述车辆的各个车轮对应的目标驱动扭矩;控制所述车辆的各个车轮分别输出对应的目标驱动扭矩。
11、根据本技术实施例的一个方面,提供了一种车辆的控制装置,包括:获取模块,用于获取所述车辆的传感系统采集到的传感器信号,并基于所述传感器信号确定驾驶意图、车辆的运行状态以及车辆的运行环境信息;第一确定模块,用于基于所述驾驶意图、所述车辆的运行状态以及所述车辆的运行环境信息确定所述车辆的目标油门开度和目标横摆角速度;第二确定模块,用于基于所述车辆的目标油门开度和目标横摆角速度以及所述车辆的运行状态,确定车辆的目标纵向力矩和目标横摆力矩;控制模块,用于基于所述车辆的目标纵向力矩和目标横摆力矩以及所述车辆的运行环境信息,计算所述车辆的各个车轮对应的目标驱动扭矩,并控制所述车辆的各个车轮输出对应的目标驱动扭矩。
12、根据本技术实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现如前所述的车辆的控制方法。
13、根据本技术实施例的一个方面,提供了一种计算机可读存储介质,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行如上所述的车辆的控制方法。
14、根据本技术实施例的一个方面,还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如上所述的车辆的控制方法中的步骤。
15、在本技术的实施例所提供的技术方案中,通过获取车辆的传感系统采集到的传感信号,从而可以基于车辆的传感器信号确定当前时刻驾驶员的驾驶意图、车辆的运行状态以及车辆的运行环境信息,从而可以充分的了解当前车辆的实际状况,之后可以基于驾驶员的驾驶意图确定车辆的目标油门开度以及目标横摆角速度,进而可以基于该车辆期望的目标油门开度和目标横摆角速度以及当前车辆的运行状态可以确定该车辆的目标纵向力矩和目标横摆力矩,通过把表征车辆失稳趋势的质心侧偏角耦合进期望横摆角速度的计算中,可以使得附加的横摆力矩兼具操纵性与稳定性控制,然后基于当前车辆的运行环境信息,将目标纵向力矩和目标横摆力矩分配到车辆的各个车轮上,从而实现对车辆在驾驶意图的驱使下兼具操纵性与稳定性控制,提高用户的驾驶体验。
16、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!