智能驾驶域控制器的制作方法
本发明涉及汽车领域,特别是涉及一种智能驾驶域控制器。
背景技术:
1、随着汽车工业的发展,智能驾驶的需求越来越大,智能驾驶系统装车率也越来越高。人们对智能驾驶的要求也越来越高,从低阶的辅助功能到更高阶的智能驾驶。对于智能驾驶系统而言,就是算力要更高,更安全,适配性更强。
2、现有技术的辅助驾驶系统算力普遍在100tops以内,甚至10tops以内,多数只能覆盖l2级辅助驾驶的部分功能。另外,现有的辅助驾驶控制器多数是针对具体某一车型定制,不能针对不同接口需求进行配置。再者,现有的辅助驾驶控制器未涉及功能安全。
3、中国专利cn202211078116.8公开了一种智能驾驶域控制器、车辆控制方法以及车辆,其中,智能驾驶域控制器包括功能模块、控制模块以及监测模块,功能模块的一端与车辆的图像采集设备连接,另一端与控制模块连接,控制模块用于对功能模块进行故障监控,监测模块与控制模块连接,监测模块用于对控制模块进行故障监控。当功能模块发生故障时可由控制模块及时发现以便进行相应的处理,而若控制模块发生故障,可由监测模块及时发现以便对控制模块进行故障处理,提升了域控制器的稳定性,进而提升了车辆运行的安全性。该方案只能提供相对固定的接口配置和初级的电源故障诊断功能,无法满足日益增加的智能驾驶控制需求。
4、中国专利cn202011188552.1公开了一种智能驾驶控制器的车辆控制方法及存储介质与计算机设备,其中,智能驾驶控制器包括ai单元、计算单元和控制单元,ai单元、计算单元和控制单元之间相互进行通信,车辆控制方法包括以下步骤:在智能驾驶控制器上电时,ai单元、计算单元和控制单元分别进行自检,以分别判断ai单元、计算单元和控制单元是否失效;若ai单元、计算单元和控制单元中的至少一个单元失效,则通过未失效单元接管失效单元对车辆的控制,从而,实现车辆的高冗余度控制,降低事故风险,提高智能驾驶控制器的可靠性与稳定性,且该智能驾驶控制器的结构简单、成本低、功耗低。方案只能提供相对固定的接口配置,不具备电源故障诊断功能,无法满足日益增加的智能驾驶控制需求。
5、中国cn201711292915.4公开了一种异构多芯片智能驾驶控制器,包括:mcu通过以太网信息交互模块和can通信模块接收控制车辆智能驾驶所需要的车辆信息,根据第一处理器发送路径规划和驾驶决策控制车辆运行;mcu供电电源模块能能与mcu进行功能安全校验;第一处理器采集维持车辆智能驾驶所需要的车辆信息,将车辆所处场景数字化,并做出路径规划,形成驾驶决策。方案虽然提供了丰富的接口,但这些接口功能和接口配置相对固定,只提供初级的电源故障诊断功能,无法满足日益增加的智能驾驶控制需求。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,该简化形式的概念均为本领域现有技术简化,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、本发明要解决的技术问题是提供一种相比现有技术能提供更高算力,具有更安全电源诊断功能,更丰富的接口及接口功能配置的智能驾驶域控制器。
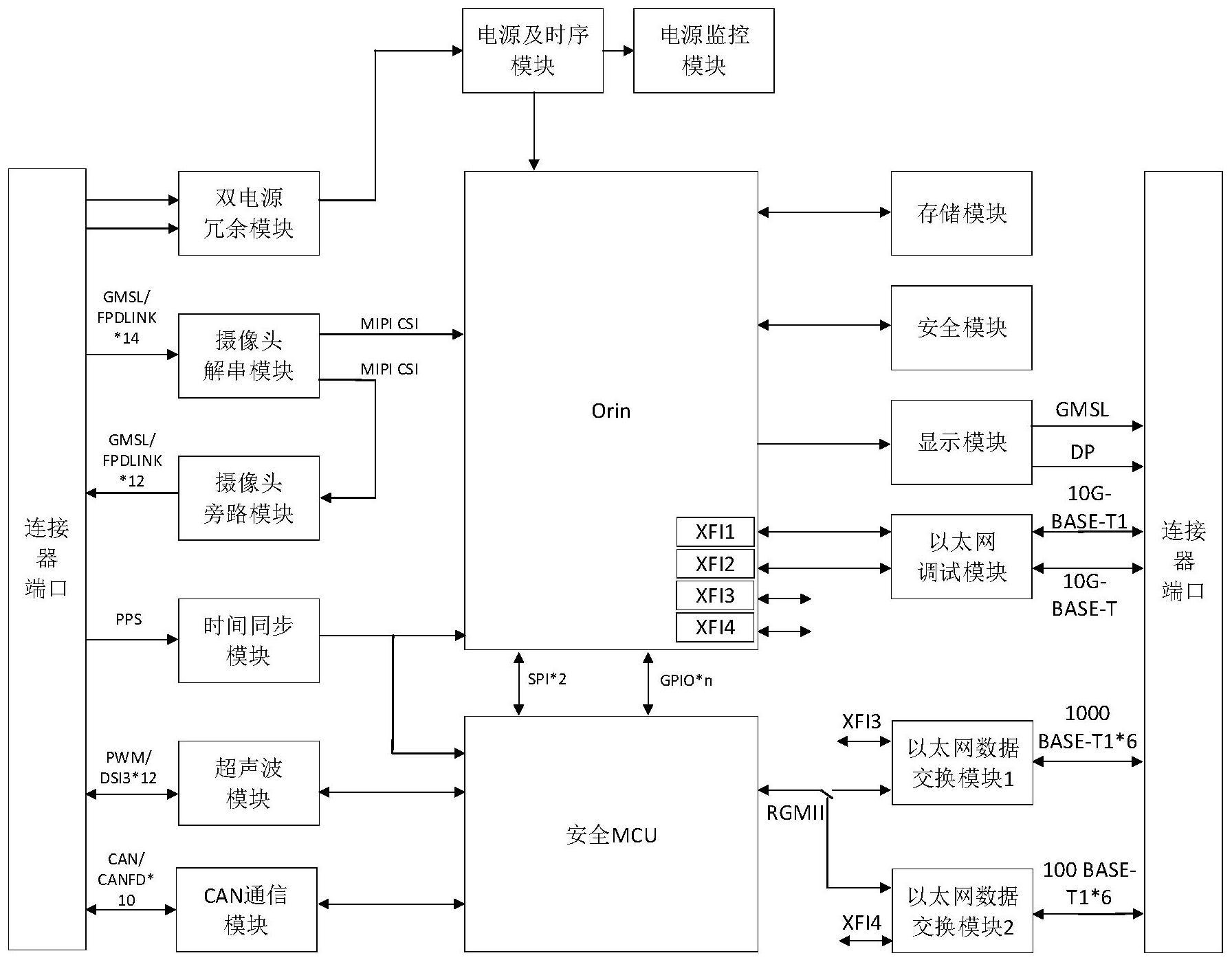
3、为解决上述技术问题,本发明提供的智能驾驶域控制器,其特征在于,包括:
4、电源管理模块,其由两路独立电源供电,其输出电压为控制器其他模块供电并监控这些电压是否正常工作,其根据安全mcu输出控制信号和预设时序输出使能信号使能多路电源芯片输出并监控自动驾驶芯片的所需的电源轨;
5、自动驾驶芯片,其用于执行自动驾驶数据链中的感知、融合和决策功能;
6、感知就是采集各种传感器的数据包括摄像头、毫米波雷达、激光雷达、超声波雷达等;这些传感器的采样时刻可能是不一样的,所以自动驾驶芯片去主导各个传感器时间同步;另外用ai算法识别各个传感器数据中的物体(车、人、道路等),各个传感器的优缺点不一样,所以需要做融合,根据各个传感器可信度计算,使识别的物体更准确;最后就是根据智能驾驶算法做出决策,比如什么时候转向,转向多少等;
7、安全mcu,其用于执行自动驾驶中的安全相关功能,其rgmii通过电阻选装方式一分为二连接以太网数据交互模块;
8、因为控制是直接控制车的,所以需要功能安全等级更高的芯片设置独立安全mcu,当然也负责其他与安全相关的功能,包括监控电压,诊断等;
9、外设设备数据接收模块,其接收智能驾驶外设设备数据发送至自动驾驶芯片;
10、时间同步模块,其用于执行控制器各模块及智能驾驶外设设备的时间同步;
11、can通信模块,其用于与车上其他控制器和/或传感器的数据交互;例如:诊断信息的上报;智驾中控制车的控制车数据下发;以及,毫米波雷达的数据输入;
12、储存模块,其用于存储控制器各模块数据;
13、安全模块,其用于安全启动和数据传输的加解密计算;
14、显示模块,其用于输出显示自动驾驶芯片输出数据;
15、以太网数据交互模块,其用于自动驾驶芯片调试数据传输,其用于安全mcu与自动驾驶芯片之间数据传输以及安全mcu和自动驾驶芯片与外部其他控制器的数据传输。
16、进一步的改进,所述的智能驾驶域控制器,电源管理模块包括:
17、电源及时序子模块,其接收安全mcu输出唤醒和休眠控制信号,其输出多路使能信号使能多路电源芯片输出自动驾驶芯片的所需的电源轨;
18、电源监控子模块,其接收安全mcu输出唤醒和休眠控制信号,其根据所述唤醒和休眠控制信号监控电源及时序子模块输出的电源轨,若出现电压异常,其告知安全mcu判断哪一路电源轨故障后上报,并执行预设安全措施。
19、进一步的改进,所述的智能驾驶域控制器,外设设备数据接收模块包括:
20、摄像头模块,其用于提供摄像头数据传输通道;
21、摄像头旁路模块,其用于将摄像头旁路到指定指定车载系统或车载模块;
22、超声波模块,其用于接收超声波设备数据。
23、摄像头模块包括:多路摄像头通道;
24、进一步的改进,所述的智能驾驶域控制器,所述摄像头通道中具有两路gmsl3通道,每路gmsl3通道由一个gmsl3解串器和两路poc电路组成;
25、其余摄像头通道由3个gmsl2或者fpd link iii解串器与12路poc电路组成;
26、其中,所有解串器的输出都通过mipi csi接口将摄像头数据传输到自动驾驶芯片,而gmsl2或者fpd link iii解串器使用剩余mipi csi接口将摄像头数据传输到摄像头旁路模块的串行器,每个解串器对应两个串行器,每个串行器只有一路gmsl2或者fpd linkiii通道输出,具体哪一路或哪几路摄像头对应哪一路摄像头旁路输出能通过在解串器处进行硬件配置或者寄存器配置。
27、进一步的,所述的智能驾驶域控制器,时间同步模块的pps信号来源为外部gnss模块,通过时间同步时钟缓冲器后一分为二分别输送至自动驾驶芯片和安全mcu,自动驾驶芯片使用gpio对外设设备进行同步。
28、进一步的,所述的智能驾驶域控制器,自动驾驶芯片和安全mcu之间还通过gpio执行时间同步校验。
29、进一步的,所述的智能驾驶域控制器,以太网数据交互模块包括
30、以太网调试子模块,其用于自动驾驶芯片调试数据传输;
31、第一以太网数据交换子模块和第二以太网数据交换子模块构成模块互斥。
32、本发明至少能实现以下技术效果;
33、1、本发明通过架构及数据传输关系相对现有技术能最大达到254tops的算力。
34、2、本发明能提供更高安全性的电源管理及电源故障诊断,本发明可以芯片电源轨级别的电源诊断,在提高安全性的同时精确定位故障通道。
35、进一步的说明,汽车电子领域有一个功能安全的概念,分别有asil-a、asil-b、asil-c、asil-d几个等级,根据不同的功能需要不同的等级,本发明等达到asil-d,即最高等级。为达到asil-d,本文中的很多芯片也是需要有功能等级要求的,电压要做更严格的监控(区别于其他的电压监控,本文的电压监控同时监控了低频分量和高频分量,还能架空上电和下电的时序是否符合要求),输入主电源的冗余备份等。
36、另外一个就是信息安全,本发明的安全模块的安全其中,数据加解密就是这个范畴。
37、3、本发明的摄像头旁路模块可以实现很多功能,比如将360摄像头旁路到中控系统中实现360的上电快速显示;将智驾摄像头旁路到备份冗余智驾域控制器,可实现智驾系统的冗余备份具有更高的安全性;将向后安装的后周视摄像头旁路到显示器,实现电子后视镜功能;将向前安装的前周视摄像头旁路到a驻显示器,实现a驻盲区显示功能。本发明解串器、串行器数量以及功能都可以按照需求进行贴装,具有灵活适配能力。
- 还没有人留言评论。精彩留言会获得点赞!