控制本车自主变道的方法、系统、车辆和计算机程序产品与流程
本发明涉及一种用于控制本车的自主变道的方法。此外,本发明涉及一种用于控制本车的自主变道的系统、一种车辆和一种计算机程序产品。
背景技术:
1、随着智能辅助驾驶/自动驾驶技术的不断发展,辅助变道和自主变道在提高交通效率方面逐渐发挥着越来越重要的作用。在现有技术中,当前方出现匝道场景时,例如匝道、交叉路口,车辆将会自主变道至左侧车道。然而,对于前方没有阻碍车辆行驶的相关车辆、尤其是没有相关车辆从匝道或者交叉路口汇入或者汇出的情况而言,这种变道是不必要的甚至反而可能导致降低车辆的行驶速度。然而,对于前方没有阻碍车辆行驶的相关车辆、尤其是没有相关车辆从匝道或者交叉路口汇入/汇出的情况而言,这种变道是不必要的甚至反而可能导致降低车辆的行驶速度。
技术实现思路
1、本发明所基于的任务在于,提出一种改进的用于控制自主变道的技术方案,以便抑制车辆的不必要的自主变道,从而确保车辆的通行效率并且同时提高车辆的舒适性。
2、根据本发明,提出一种用于控制本车的自主变道的方法、一种用于控制本车的自主变道的系统、一种车辆和一种计算机程序产品。本发明的其他特征和细节能够由相应的扩展技术方案、说明书和附图得出。
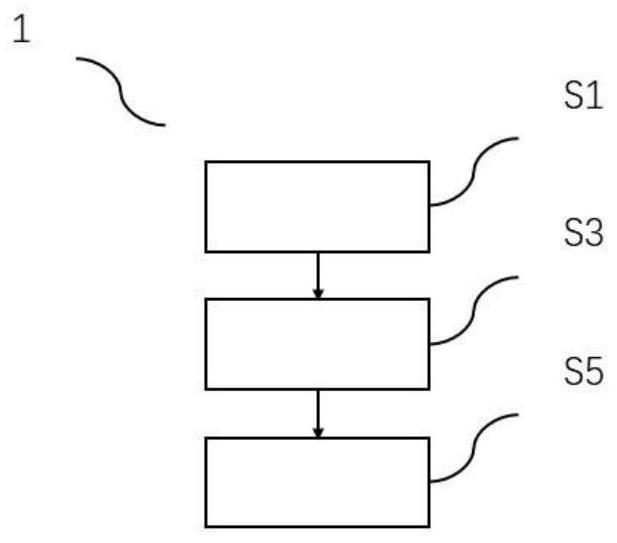
3、根据本发明的第一方面,提出一种用于控制本车的自主变道的方法,所述方法包括:
4、获取关于所述本车的行驶环境的行驶环境信息,以便确定在所述本车的前方是否存在匝道场景;
5、在存在所述匝道场景的情况下,判断是否存在降低所述本车的通行效率的目标车辆,所述目标车辆尤其是包括位于与所述匝道场景相应的次要车道上的第一相关车辆和/或位于所述本车的当前车道上的第二相关车辆;和
6、基于所述判断,相应地控制所述本车的自主变道。
7、在本发明的范畴内,“匝道场景”包括相交的主要道路或者说主要车道(也被称为主线)、相交的次要道路或者说次要车道(也被称为引线)和连接引线与主线互通的线路(也被称为匝道),其不仅包括车辆的汇入、还包括车辆的汇出。示例性地,所述匝道场景出现在高速公路和交叉路口处,例如,高速公路入口、高速公路出口等。在本发明的范畴内,除非另有说明,否则同义地使用次要车道和匝道。换言之,当提及次要车道或者说引线时,附加地能够包括匝道,并且,当提及匝道时,附加地能够包括次要车道或者说引线。在此,所述匝道场景的确定例如能够基于高精地图的地图数据实现。替代地,所述匝道场景的确定例如也能够基于实时检测到的数据、尤其是图像数据实现,例如检测道路走向(相交的道路走向)、道路标牌、道路标线等。
8、在本发明的范畴内,车辆的通行效率尤其是能够通过速度来表征,例如多个车辆的平均速度。在此,如果在右侧匝道上不存在不利地影响(即降低)本车的行驶速度的其他相关车辆,例如如果在右侧匝道上不存在缓慢行驶的第一相关车辆,则本车的当前的行驶状态、尤其是行驶速度不会受到匝道场景的不利影响,因而无需响应于匝道场景地执行变道操作。此外,如果在本车的当前车道、尤其是主要车道上不存在不利地影响(即降低)本车的行驶速度的前方车辆、即第二相关车辆,则本车的当前的行驶状态、尤其是行驶速度在很大程度上不会受到匝道场景的不利影响,因而也无需响应于匝道场景地执行变道操作,这尤其是对于本车由于视野受到遮挡而无法检测到关于第一相关车辆的数据的情况而言是有利的。
9、根据本发明,当辅助驾驶/自动驾驶的车辆即将靠近匝道时,并不必然地执行变道操作,而是视行驶环境而定地判断是否确实需要执行变道操作,以便避免车辆汇入/汇出所导致的通行效率降低。尤其是,在这种情况下,检测匝道上的相关车辆以及替代地或者附加地还检测本车前方的相关车辆,并且,在所述检测的结果表明并不存在导致所述本车的通行效率降低的目标车辆的情况下抑制本车的变道操作。通过这种方式,仅在需要时才变道至通行效率更高的车道、例如左侧车道,而避免不必要的、甚至可能引起通行效率降低的变道操作(例如,由于左侧车道交通拥堵或者说左侧车道上的车辆较缓慢地行驶),从而在不影响通行效率的同时提高了舒适性以及降低了变道操作可能引起的安全问题,进一步提高了自动驾驶功能、尤其是自动驾驶等级l2的可接受度。
10、根据本发明的一种优选实施方式设置,如果在所述次要车道上的相关区域内没有检测到所述第一相关车辆,和/或,所述第一相关车辆的第一速度大于第一速度阈值,则判定不存在所述目标车辆。附加地或者替代地,如果在所述当前车道上的相关区域内没有检测到所述第二相关车辆,和/或,所述第二相关车辆的第二速度大于第二速度阈值,则判定不存在所述目标车辆。能够想到,所述第一速度阈值和所述第二速度阈值可以是不同的,也可以是相同的。
11、根据本发明的一种优选实施方式设置,所述次要车道上的相关区域和/或所述当前车道上的相关区域是通过与所述本车的距离和/或相对于所述本车的方位角确定的。优选地,所述距离和/或所述方位角是根据所述本车的速度确定的。替代地或者附加地,所述距离是通过所述匝道的终点确定的。换言之,所述距离或者说也能够被定义为自本车起直至所述匝道的终点为止的距离。
12、根据本发明的一种优选实施方式设置,将所述距离确定为根据所述本车的速度确定的距离和自本车起直至所述匝道的终点为止的距离中的较小值。换言之,所述相关区域或者所述距离能够是将根据本车的速度确定的值和根据所述匝道的终点确定的值综合考虑所求取出来的值,例如二者中的较大值。然而,在此也不排除使用二者中的较小值。
13、根据本发明的一种优选实施方式设置,如果所述判断表明不存在所述目标车辆,则抑制所述本车的自主变道。
14、根据本发明的一种优选实施方式设置,附加地判断所述当前车道是否是与所述匝道场景相应的主要车道,其中,如果所述当前车道不是与所述匝道场景相应的主要车道,则抑制所述本车的自主变道。能够想到,如果所述当前车道不是所述主要车道,则匝道上的车辆的汇入/汇出对当前车道的影响是相对较小的,因而几乎不影响本车的行驶状态。然而,在此并不排除本车的变道操作,因为主要车道上的车辆可能变道至本车所处于的当前车道。
15、根据本发明的一种优选实施方式设置,附加地计算所述本车的当前车道的第一通行效率和所述本车的与所述次要车道相对置的相邻车道的第二通行效率。优选地,如果所述判断表明存在所述目标车辆,并且,所述第一通行效率大于所述第二通行效率,则抑制所述本车的自主变道。反之,如果所述判断表明存在所述目标车辆,并且,所述第一通行效率小于所述第二通行效率,则执行所述本车的自主变道。也就是说,仅当变道操作能够提高本车的通行效率时才执行变道操作。优选地,所述第一通行效率和所述第二通行效率通过速度、尤其是平均速度表征。
16、根据本发明的第二方面,提出一种用于控制本车的自主变道的系统,所述系统包括控制装置,所述控制装置配置用于实施根据本发明的用于控制本车的自主变道的方法。
17、根据本发明的第三方面,提出一种车辆,所述车辆安装有根据本发明的用于控制本车的自主变道的系统。
18、根据本发明的第三方面,提出一种计算机程序产品、例如计算机可读程序介质,所述计算机程序产品包括或存储有计算机程序指令,当所述计算机程序指令被处理器运行时,所述计算机程序指令能够实施实施根据本发明的用于控制本车的自主变道的方法。
19、在此,结合根据本发明的用于控制本车的自主变道的方法所描述的特征和细节也适用于根据本发明的用于控制本车的自主变道的系统、根据本发明的车辆和根据本发明的计算机程序产品,并且反之亦然。
- 还没有人留言评论。精彩留言会获得点赞!