一种主被动安全融合控制方法及系统与流程
本技术涉及整车安全控制,尤其涉及一种主被动安全融合控制方法及系统。
背景技术:
1、汽车的主动安全技术,指汽车本身设置装配的一些能主动避免安全事故发生的装置与技术,例如aeb自动紧急制动系统。汽车的被动安全技术,指在汽车发生交通事故之后,能够尽最大程度减少驾车和乘坐人人身损伤的安全装置与技术,例如电动安全带,主动式机罩等配置。主被动安全融合技术,指利用主动安全对车辆运行状态、环境状态识别,并据此对被动安全相关配置进行控制,从而有效提升车辆安全性能。
2、在主被动安全融合技术中,aeb自动紧急制动系统和电动安全带的主被动配合是典型案例,通过环境感知传感器结合aeb自动紧急制动系统的控制信号,选择性地收紧或放松电动安全带。
3、而在研究中发现,由于这种方式主要受控于aeb自动紧急制动系统,而aeb自动紧急制动系统一般在车辆失控时才会紧急制动,并控制安全带拉紧,由此可见,现有技术的主被动安全融合技术无法提前识别车辆异常,不能完全保证司乘人员的行车安全。
技术实现思路
1、本发明提供了一种主被动安全融合控制方法及系统,通过车辆行驶相关参数(车轮轮速,横向加速度,纵向加速度,方向盘转角,横摆角速度,制动踏板信号,加速踏板信号),计算整车稳定因子,基于整车稳定因子对主动安全带进行调整,能够提前识别车辆异常失控场景,在车辆出现危险之前对车内司乘乘员进行保护,从而解决或者部分解决现有技术的主被动安全融合技术无法提前识别车辆异常的技术问题,提升司乘乘员保护安全性。
2、为解决上述技术问题,本发明的第一方面,公开了一种主被动安全融合控制方法,所述方法包括:
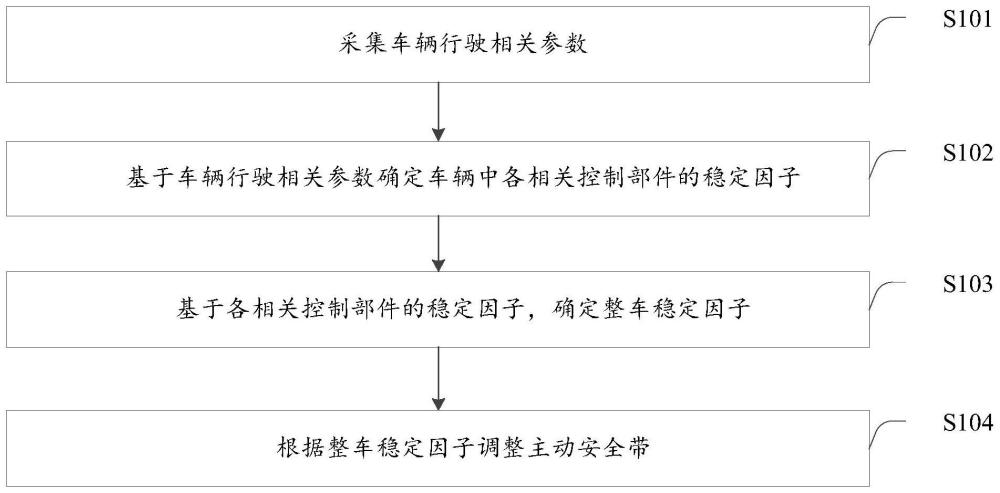
3、采集车辆行驶相关参数;所述车辆行驶相关参数包括:车轮轮速,横向加速度,纵向加速度,方向盘转角,横摆角速度,制动踏板信号,加速踏板信号;
4、基于所述车辆行驶相关参数确定车辆中各相关控制部件的稳定因子;
5、基于所述各相关控制部件的稳定因子,确定整车稳定因子;
6、根据所述整车稳定因子调整主动安全带。
7、可选的,所述各相关控制部件的稳定因子包括:制动防抱死部件的稳定因子,驱动防滑部件的稳定因子,横摆稳定控制部件的稳定因子,拖滞力矩控制部件的稳定因子,防侧翻控制部件的稳定因子。
8、可选的,所述基于所述车辆行驶相关参数确定车辆中各相关控制部件的稳定因子,具体包括:
9、根据所述纵向加速度和所述车辆中的各车轮轮速,计算整车车速;
10、计算各车轮实时滑移率;
11、判断所述车辆行驶相关参数是否满足第一设定条件;所述第一设定条件为:所述整车车速大于第一车速阈值,且所述制动踏板信号表示制动踏板踩下;
12、若满足,从所述各车轮实时滑移率中确定整车滑移率,并利用所述整车滑移率确定所述制动防抱死部件的稳定因子;所述整车滑移率与所述制动防抱死部件的稳定因子的映射关系为:其中,δ表示所述整车滑移率,h1表示所述制动防抱死部件的稳定因子,a%、b%表示所述制动防抱死部件所需滑移率范围的端点值。
13、可选的,所述基于所述车辆行驶相关参数确定车辆中各相关控制部件的稳定因子,具体包括:
14、判断所述车辆行驶相关参数是否满足第二设定条件;所述第二设定条件为:所述加速踏板信号表示加速踏板踩下;
15、若满足,利用所述整车滑移率确定所述驱动防滑部件的稳定因子;所述整车滑移率与所述驱动防滑部件的稳定因子的映射关系为:其中,δ表示所述整车滑移率,h2表示所述驱动防滑部件的稳定因子,c%、d%表示所述驱动防滑部件所需滑移率范围的端点值。
16、可选的,所述基于所述车辆行驶相关参数确定车辆中各相关控制部件的稳定因子,具体包括:
17、判断所述车辆行驶相关参数是否满足第三设定条件;所述第三设定条件为:所述整车车速大于第二车速阈值,且方向盘转角大于第一设定转角阈值,且横向加速度大于第一设定横向加速度阈值,且横摆角速度大于设定角速度阈值;
18、若满足,利用所述横摆角速度确定所述横摆稳定控制部件的稳定因子;所述横摆角速度与所述横摆稳定控制部件的稳定因子的映射关系为:其中,ω表示所述横摆角速度,h3表示所述横摆稳定控制部件的稳定因子,e%、f%表示所述横摆稳定控制部件所需横摆角速度范围的端点值。
19、可选的,所述基于所述车辆行驶相关参数确定车辆中各相关控制部件的稳定因子,具体包括:
20、判断所述车辆行驶相关参数是否满足第四设定条件;所述第四设定条件为:所述整车车速大于第三车速阈值,且所述加速踏板信号与所述制动踏板信号表示未踩下;
21、若满足,利用所述整车滑移率确定所述拖滞力矩控制部件的稳定因子;所述整车滑移率与所述拖滞力矩控制部件的稳定因子的映射关系为:其中,δ表示所述整车滑移率,h4表示所述拖滞力矩控制部件的稳定因子,g%、h%表示所述拖滞力矩控制部件所需滑移率范围的端点值。
22、可选的,所述基于所述车辆行驶相关参数确定车辆中各相关控制部件的稳定因子,具体包括:
23、判断所述车辆行驶相关参数是否满足第五设定条件;所述第五设定条件为:所述整车车速大于第四车速阈值,且方向盘转角大于第二设定转角阈值,且横向加速度大于第二设定横向加速度阈值;
24、若满足,利用所述横向加速度确定所述防侧翻控制部件的稳定因子;所述横向加速度与所述防侧翻控制部件的稳定因子的映射关系为:其中,α横表示所述横向加速度,h5表示所述防侧翻控制部件的稳定因子,i%、j%表示所述防侧翻控制部件所需横向加速度范围的端点值。
25、可选的,所述基于所述各相关控制部件的稳定因子,确定整车稳定因子,具体包括:
26、从所述各相关控制部件的稳定因子中确定最小稳定因子作为所述整车稳定因子。
27、可选的,所述根据所述整车稳定因子调整主动安全带,具体包括:
28、根据所述整车稳定因子确定对应的车辆安全档位;
29、按照所述车辆安全档位对应调整所述主动安全带。
30、本发明的第二方面,公开了一种主被动安全融合控制系统,所述系统包括:
31、采集模块,用于采集车辆行驶相关参数;所述车辆行驶相关参数包括:车轮轮速,横向加速度,纵向加速度,方向盘转角,横摆角速度,制动踏板信号,加速踏板信号;
32、第一确定模块,用于基于所述车辆行驶相关参数确定车辆中各相关控制部件的稳定因子;
33、第二确定模块,用于基于所述各相关控制部件的稳定因子,确定整车稳定因子;
34、调整模块,用于根据所述整车稳定因子调整主动安全带。
35、通过本发明的一个或者多个技术方案,本发明具有以下有益效果或者优点:
36、本发明中的方案,通过车辆行驶相关参数逐步确定整车稳定因子,再根据整车稳定因子对主动安全带进行调整,能够提前识别车辆异常失控场景,在车辆出现危险之前对车内司乘乘员进行保护,从而有效提升司乘乘员保护安全性。
37、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!