车辆速度控制方法、装置、终端设备以及存储介质与流程
本申请涉及自动驾驶领域,尤其涉及一种车辆速度控制方法、装置、终端设备以及存储介质。
背景技术:
1、随着车辆智能化的深入,车速闭环控制被广泛应用在车辆电子限速、定速巡航和自适应巡航等功能中,其目的是根据目标速度自动控制车辆加减速的扭矩,通过扭矩控制实际车辆运行在目标速度范围内。
2、目前的车辆扭矩控制方法大多为pid(proportional-integral-derivative,比例积分微分)控制法,这种控制方法是通过输入实际车速与目标速度进行闭环调节。然而,这种控制方法是基于预先设置好的参数进行车辆速度控制,可以理解地,在车辆行驶的过程中,会遇到多种工况,用相同的参数应对不同的工况进行车辆速度控制,会产生参数不适配的情况,使得控制速度的过程不稳定,会引起较大的车辆速度控制超调问题。
技术实现思路
1、本申请的主要目的在于提供一种车辆速度控制方法、装置、终端设备以及存储介质,旨在解决车辆速度控制的超调问题。
2、为实现上述目的,本申请提供一种车辆速度控制方法,所述车辆速度控制方法包括:
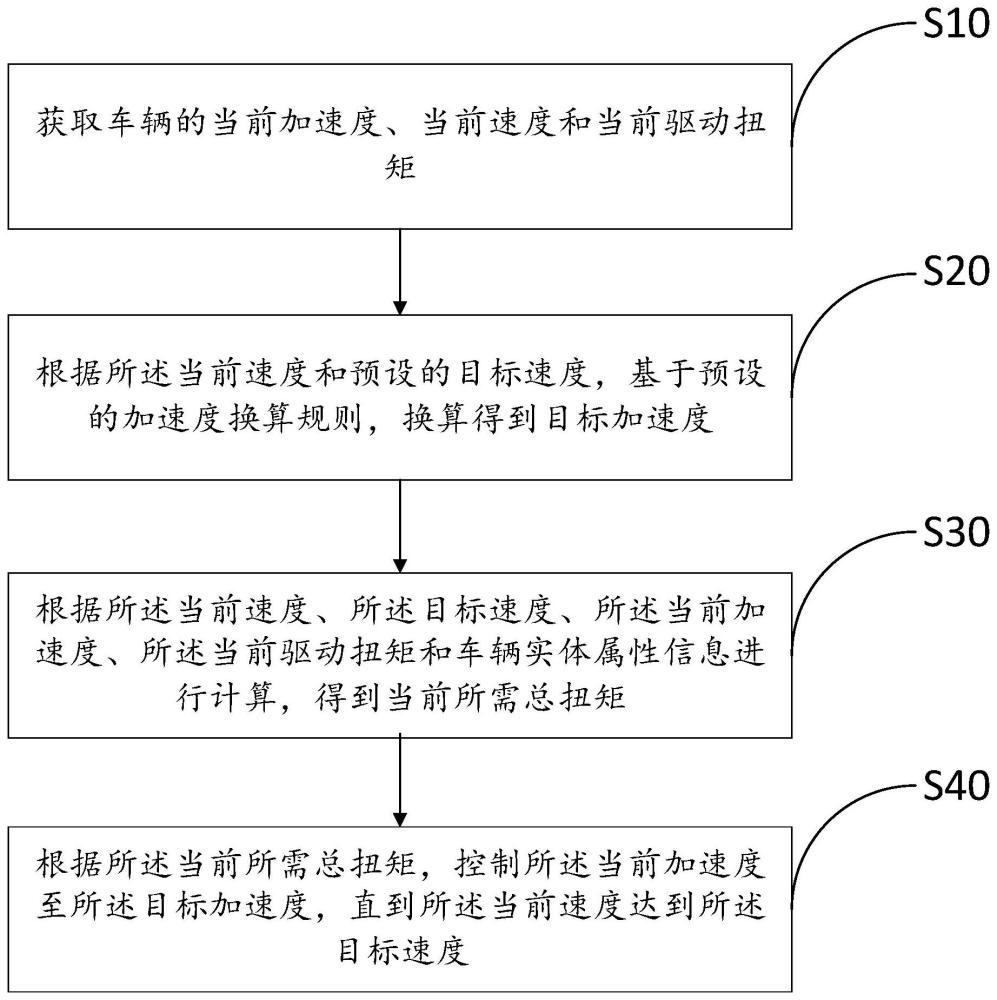
3、获取车辆的当前加速度、当前速度和当前驱动扭矩;
4、根据所述当前速度和预设的目标速度,基于预设的加速度换算规则,换算得到目标加速度;
5、根据所述当前速度、所述目标速度、所述当前加速度、所述当前驱动扭矩和车辆实体属性信息进行计算,得到当前所需总扭矩;
6、根据所述当前所需总扭矩,控制所述当前加速度至所述目标加速度,直到所述当前速度达到所述目标速度。
7、可选地,所述车辆实体属性信息包括车轮半径、车辆重量和车轮转动惯量系数,所述根据所述当前速度、所述目标速度、所述当前加速度、所述当前驱动扭矩和车辆实体属性信息进行计算,得到当前所需总扭矩的步骤包括:
8、基于所述当前速度、所述目标速度、所述车轮半径、所述车辆重量和所述车轮转动惯量系数进行计算,得到目标加速所需扭矩;
9、基于所述当前驱动扭矩、所述当前加速度和所述车轮半径、所述车辆重量和所述车轮转动惯量系数进行计算,得到阻力扭矩;
10、基于所述阻力扭矩和所述目标加速所需扭矩进行计算,得到所述当前所需总扭矩。
11、可选地,所述基于所述当前速度、所述目标速度、所述车轮半径、所述车辆重量和所述车轮转动惯量系数进行计算,得到目标加速所需扭矩的步骤包括:
12、根据所述当前速度和预设的目标速度进行加速度换算,得到所述目标加速度;
13、基于目标加速度、所述车轮半径、所述车辆重量和所述车轮转动惯量系数进行计算,得到所述目标加速所需扭矩。
14、可选地,所述车辆实体属性信息包括车辆种类,所述基于所述当前速度、所述目标速度、所述车轮半径、所述车辆重量和所述车轮转动惯量系数进行计算,得到目标加速所需扭矩的步骤还包括:
15、基于所述当前速度和所述目标速度进行差值计算,得到车速差值;
16、根据所述车速差值、所述车辆种类,基于预设的车速差扭矩表,得到所述目标加速所需扭矩。
17、可选地,所述基于所述当前驱动扭矩、所述当前加速度和所述车轮半径、所述车辆重量和所述车轮转动惯量系数进行计算,得到阻力扭矩的步骤包括:
18、基于所述当前加速度、所述车轮半径、所述车辆重量和所述车轮转动惯量系数进行计算,得到当前加速扭矩;
19、从所述当前驱动扭矩中减去所述当前加速扭矩,得到所述阻力扭矩。
20、可选地,所述根据所述当前所需总扭矩,控制所述当前加速度至所述目标加速度的步骤包括:
21、通过将所述当前驱动扭矩转换为所述当前所需总扭矩,对所述当前加速度进行控制,直到所述当前加速度达到所述目标加速度。
22、可选地,所述根据所述当前速度和预设的目标速度,基于预设的加速度换算规则,换算得到目标加速度的步骤之前还包括:
23、获取车辆性能信息和乘客体验数据;
24、根据所述车辆性能信息和所述乘客体验数据制定所述加速度换算规则。
25、本申请实施例还提出一种车辆速度控制装置,所述车辆速度控制装置包括:
26、信息获取模块,用于获取车辆的当前加速度、当前速度和当前驱动扭矩;
27、加速度换算模块,用于根据所述当前速度和预设的目标速度,基于预设的加速度换算规则,换算得到目标加速度;
28、扭矩计算模块,用于根据所述当前速度、所述目标速度、所述当前加速度、所述当前驱动扭矩和车辆实体属性信息进行计算,得到当前所需总扭矩;
29、车辆速度控制模块,用于根据所述当前所需总扭矩,控制所述当前加速度至所述目标加速度,直到所述当前速度达到所述目标速度。
30、本申请实施例还提出一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆速度控制程序,所述车辆速度控制程序被所述处理器执行时实现如上所述的车辆速度控制方法的步骤。
31、本申请实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有车辆速度控制程序,所述车辆速度控制程序被处理器执行时实现如上所述的车辆速度控制方法的步骤。
32、本申请实施例提出的车辆速度控制方法、装置、终端设备以及存储介质,通过获取车辆的当前加速度、当前速度和当前驱动扭矩;根据所述当前速度和预设的目标速度,基于预设的加速度换算规则,换算得到目标加速度;根据所述当前速度、所述目标速度、所述当前加速度、所述当前驱动扭矩和车辆实体属性信息进行计算,得到当前所需总扭矩;根据所述当前所需总扭矩,控制所述当前加速度至所述目标加速度,直到所述当前速度达到所述目标速度。提出通过获取车辆的当前加速度、当前速度和当前驱动扭矩,根据当前速度和预设的目标速度进行加速度换算,得到目标加速度,然后,根据当前速度、目标速度、当前加速度、当前驱动扭矩和车辆实体属性信息计算得到车辆的当前所需总扭矩,最后根据车辆的当前所需总扭矩控制车辆的驱动,使当前加速度达到目标加速度,直到所述当前速度达到所述目标速度。可以理解地,上述方法不需要进行参数标定即可应用,而且即使在车辆位于坡道或泥地等不同工况时,当前环境对车辆的影响会反映在当前加速度、当前速度和当前驱动扭矩等数据上,而车辆的当前所需总扭矩也会随着当前加速度、当前速度和当前驱动扭矩的变化而变化来控制当前加速度,最终控制当前速度。因此不存在固定参数,相关数据会根据车辆所处的环境的变化而变化,可以很好地适配车辆行驶环境,因此不存在参数不适配导致车辆速度控制超调问题,解决车辆速度控制的超调问题。
技术特征:
1.一种车辆速度控制方法,其特征在于,所述车辆速度控制方法包括:
2.根据权利要求1所述的车辆速度控制方法,其特征在于,所述车辆实体属性信息包括车轮半径、车辆重量和车轮转动惯量系数,所述根据所述当前速度、所述目标速度、所述当前加速度、所述当前驱动扭矩和车辆实体属性信息进行计算,得到当前所需总扭矩的步骤包括:
3.根据权利要求2所述的车辆速度控制方法,其特征在于,所述基于所述当前速度、所述目标速度、所述车轮半径、所述车辆重量和所述车轮转动惯量系数进行计算,得到目标加速所需扭矩的步骤包括:
4.根据权利要求2所述的车辆速度控制方法,其特征在于,所述车辆实体属性信息包括车辆种类,所述基于所述当前速度、所述目标速度、所述车轮半径、所述车辆重量和所述车轮转动惯量系数进行计算,得到目标加速所需扭矩的步骤还包括:
5.根据权利要求2所述的车辆速度控制方法,其特征在于,所述基于所述当前驱动扭矩、所述当前加速度和所述车轮半径、所述车辆重量和所述车轮转动惯量系数进行计算,得到阻力扭矩的步骤包括:
6.根据权利要求1所述的车辆速度控制方法,其特征在于,所述根据所述当前所需总扭矩,控制所述当前加速度至所述目标加速度的步骤包括:
7.根据权利要求1所述的车辆速度控制方法,其特征在于,所述根据所述当前速度和预设的目标速度,基于预设的加速度换算规则,换算得到目标加速度的步骤之前还包括:
8.一种车辆速度控制装置,其特征在于,所述车辆速度控制装置包括:
9.一种终端设备,其特征在于,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆速度控制程序,所述车辆速度控制程序被所述处理器执行时实现如权利要求1-7中任一项所述的车辆速度控制方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有车辆速度控制程序,所述车辆速度控制程序被处理器执行时实现如权利要求1-7中任一项所述的车辆速度控制方法的步骤。
技术总结
本申请公开了一种车辆速度控制方法、装置、终端设备以及存储介质,涉及自动驾驶领域,其方法包括:获取车辆的当前加速度、当前速度和当前驱动扭矩;根据所述当前速度和预设的目标速度,基于预设的加速度换算规则,换算得到目标加速度;根据所述当前速度、所述目标速度、所述当前加速度、所述当前驱动扭矩和车辆实体属性信息进行计算,得到当前所需总扭矩;根据所述当前所需总扭矩,控制所述当前加速度至所述目标加速度,直到所述当前速度达到所述目标速度。本发明解决了车辆速度控制的超调问题。
技术研发人员:王淞
受保护的技术使用者:浙江绿色智行科创有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!