平板车轮端需求扭矩和功率计算方法、装置、设备及介质与流程
本发明涉及无人驾驶车辆轮端需求扭矩计算,具体涉及一种平板车轮端需求扭矩和功率计算方法、装置、设备及介质。
背景技术:
1、随着全球贸易的增长和港口业务的扩大,港口物流运输变得更为重要和复杂。为了提高港口货物运输的效率和安全性,采用纯电动无人驾驶平板车成为一种有前景的解决方案。这种平板车能够在港口内部自主行驶,携带货物从码头到仓库或其他目的地,从而减少人力成本和时间消耗。
2、传统的港口货物运输通常依赖于人工驾驶的柴油或汽油车辆,这种方式存在一些挑战和局限性。首先,人工驾驶需要雇佣司机,成本高且效率低下。其次,燃油车辆排放的废气会对环境造成污染。另外,港口通常是繁忙和拥挤的工作环境,需要准确的驾驶和导航能力以避免事故。
3、港口纯电动无人驾驶平板车可以解决上述问题。该车辆将使用电动驱动系统代替传统的燃油发动机,实现零排放运行。纯电平板车可减少人为错误和事故的风险。通过这种创新的解决方案,港口运输将变得更加高效、环保和安全。如何计算纯电动无人驾驶平板车车轮端需求扭矩及功率是本技术要解决的技术问题。
技术实现思路
1、如何计算纯电动无人驾驶平板车车轮端需求扭矩及功率的问题,本发明提供一种平板车轮端需求扭矩和功率计算方法、装置、设备及介质。
2、第一方面,本发明技术方案提供一种平板车轮端需求扭矩和功率计算方法,包括如下步骤:
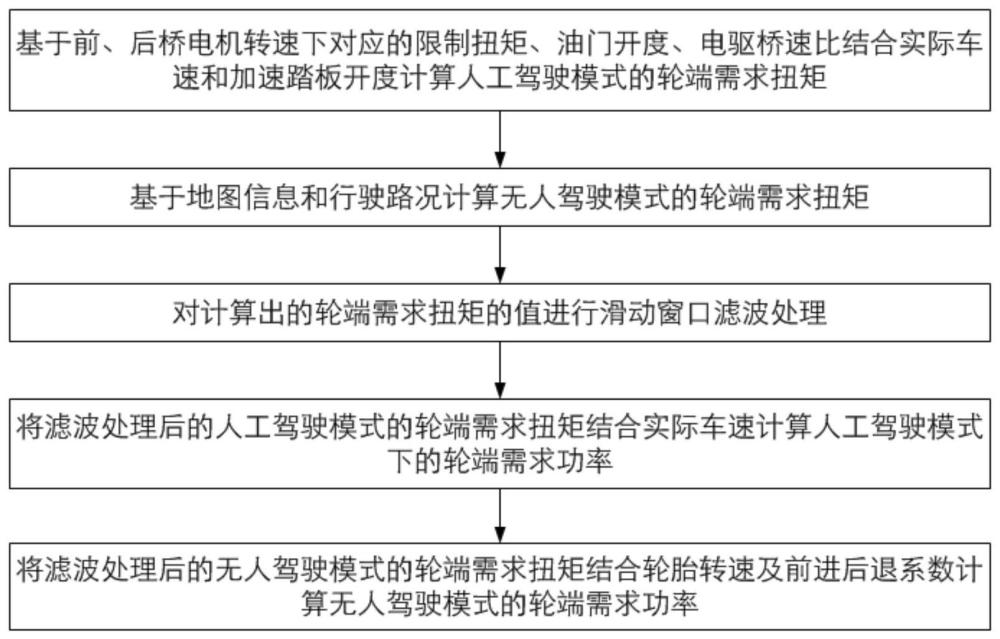
3、基于前、后桥电机转速下对应的限制扭矩、油门开度、电驱桥速比结合实际车速和加速踏板开度计算人工驾驶模式的轮端需求扭矩;
4、基于地图信息和行驶路况计算无人驾驶模式的轮端需求扭矩;
5、对计算出的轮端需求扭矩的值进行滑动窗口滤波处理;
6、将滤波处理后的人工驾驶模式的轮端需求扭矩结合实际车速计算人工驾驶模式下的轮端需求功率;
7、将滤波处理后的无人驾驶模式的轮端需求扭矩结合轮胎转速及前进后退系数计算无人驾驶模式的轮端需求功率。
8、作为本发明技术方案的进一步限定,基于前、后桥电机转速下对应的限制扭矩、油门开度、电驱桥速比结合实际车速和加速踏板开度计算人工驾驶模式的轮端需求扭矩的步骤包括:
9、基于前、后桥电机转速下对应的限制扭矩、加速踏板油门开度及电驱桥速比计算参考轮端需求扭矩;
10、根据实际车速和油门开度建立模型计算与车速相关的待定轮端需求扭矩;
11、计算参考轮端需求扭矩和待定轮端需求扭矩的差值;
12、采用递归最小二乘算法根据差异的大小和方向来调整模型的参数,得到人工驾驶模式的轮端需求扭矩。
13、作为本发明技术方案的进一步限定,基于前、后桥电机转速下对应的限制扭矩、加速踏板油门开度及电驱桥速比计算参考轮端需求扭矩的步骤包括:
14、前桥主电机当前转速对应峰值扭矩乘以加速踏板油门开度得到前桥轮端参考需求扭矩;
15、后桥主电机当前转速对应峰值扭矩乘以加速踏板油门开度得到后桥轮端参考需求扭矩;
16、前桥轮端参考需求扭矩和后桥轮端参考需求扭矩分别乘以电驱桥速比后求和得到参考轮端需求扭矩。
17、作为本发明技术方案的进一步限定,基于地图信息和行驶路况计算无人驾驶模式的轮端需求扭矩的步骤包括:
18、基于地图信息和行驶路况计算需求扭矩百分比;
19、将前桥主电机当前转速对应峰值扭矩和后桥主电机当前转速对应峰值扭矩求和得到峰值扭矩限值;
20、计算峰值扭矩限值、需求扭矩百分比和电驱桥速比的乘积得到无人驾驶模式的轮端需求扭矩。
21、充分考虑人工驾驶和无人驾驶两种模式,人工驾驶模式考虑了前、后桥电机转速下对应的限制扭矩、加速踏板油门开度及速比等因素,计算参考轮端需求扭矩,并结合实际车速和油门开度所建立的模型进行修正和更新,计算得到更合理的轮端需求扭矩;无人驾驶模式,由vcu控制器中地图信息和行驶路况,自动计算出需求扭矩百分比,由峰值扭矩限值求得轮端需求扭矩,将两种模式整合输出,得到轮端需求扭矩值,从而满足整个动力控制系统的各项限制需求。
22、作为本发明技术方案的进一步限定,对计算出的轮端需求扭矩的值进行滑动窗口滤波处理的步骤包括:
23、定义滑动时间窗口大小;
24、获取滑动时间窗口内轮端需求扭矩的值并对获取的轮端需求扭矩的值进行处理;具体包括:将大于扭矩限制的轮端需求扭矩的值替换成扭矩限制,将电机扭矩从负扭矩或零扭矩变化到正扭矩,或者从正扭矩或零扭矩变化到负扭矩的情况的轮端需求扭矩的值进行过零处理;
25、处理完成后计算滑动时间窗口内的扭矩平均值记作平滑轮端需求扭矩值,即滤波处理后的轮端需求扭矩的值;
26、若否,执行步骤:计算滑动时间窗口内的扭矩平均值记作平滑轮端需求扭矩值,即滤波处理后的轮端需求扭矩的值。
27、为了使得需求扭矩值更加平滑,避免其剧烈变化情况,进行滤波处理,提升了纯电平板车行驶平稳性和安全性。
28、作为本发明技术方案的进一步限定,将滤波处理后的人工驾驶模式的轮端需求扭矩结合实际车速计算人工驾驶模式下的轮端需求功率的步骤包括:
29、将滤波处理后的人工驾驶模式的轮端需求扭矩t轮端结合实际车速计算参考轮端需求功率w参考=v车速*t轮端*1000/(9550*60*2*3.14*r轮胎);
30、根据实际车速和车重计算轮端牵引力;
31、根据轮端牵引力和实际车速建立模型计算待定轮端需求功率;
32、计算参考轮端需求功率和待定轮端需求功率的差值;
33、采用递归最小二乘算法根据差值的大小和方向来调整模型的参数,得到人工驾驶模式的轮端需求功率。
34、作为本发明技术方案的进一步限定,将滤波处理后的无人驾驶模式的轮端需求扭矩结合轮胎转速及前进后退系数计算无人驾驶模式的轮端需求功率的步骤包括:
35、将滤波处理后的无人驾驶模式的轮端需求扭矩、轮胎转速、前进后退系数相乘后除以设定常数得到无人驾驶模式的轮端需求功率。
36、考虑了人工驾驶和无人驾驶两种模式,人工驾驶模式,由更新后的轮端需求扭矩值和实际车速计算出参考轮端需求功率,再根据实际车速与牵引动力建立的模型,计算待定轮端需求功率值,模型校正更新后得到合适的轮端需求功率值,满足电机功率限值;无人驾驶模式,由扭矩百分比求得的需求扭矩和轮端转速计算轮端需求功率值,将两种模式整合输出需求功率,更加符合实际行驶的动力需求,达到节能高效运行效果。
37、第二方面,本发明技术方案还提供一种平板车轮端需求扭矩和功率计算装置,包括人工模式需求扭矩计算模块、无人驾驶模式需求扭矩计算模块、滤波处理模块、人工模式需求功率计算模块和无人驾驶需求功率计算模块;
38、人工模式需求扭矩计算模块,用于基于前、后桥电机转速下对应的限制扭矩、油门开度、电驱桥速比结合实际车速和加速踏板开度计算人工驾驶模式的轮端需求扭矩;
39、无人驾驶模式需求扭矩计算模块,用于基于地图信息和行驶路况计算无人驾驶模式的轮端需求扭矩;
40、滤波处理模块,用于对计算出的轮端需求扭矩的值进行滑动窗口滤波处理;
41、人工模式需求功率计算模块,用于将滤波处理后的人工驾驶模式的轮端需求扭矩结合实际车速计算人工驾驶模式下的轮端需求功率;
42、无人驾驶需求功率计算模块,用于将滤波处理后的无人驾驶模式的轮端需求扭矩结合轮胎转速及前进后退系数计算无人驾驶模式的轮端需求功率。
43、作为本发明技术方案的进一步限定,人工模式需求扭矩计算模块包括参考扭矩计算单元、待定扭矩计算单元和扭矩计算调整处理单元;
44、参考扭矩计算单元,用于基于前、后桥电机转速下对应的限制扭矩、加速踏板油门开度及电驱桥速比计算参考轮端需求扭矩;
45、待定扭矩计算单元,用于根据实际车速和油门开度建立模型计算与车速相关的待定轮端需求扭矩;
46、扭矩计算调整处理单元,用于计算参考轮端需求扭矩和待定轮端需求扭矩的差值并采用递归最小二乘算法根据差异的大小和方向来调整模型的参数,得到人工驾驶模式的轮端需求扭矩。
47、作为本发明技术方案的进一步限定,参考扭矩计算单元,具体用于前桥主电机当前转速对应峰值扭矩乘以加速踏板油门开度得到前桥轮端参考需求扭矩;后桥主电机当前转速对应峰值扭矩乘以加速踏板油门开度得到后桥轮端参考需求扭矩;前桥轮端参考需求扭矩和后桥轮端参考需求扭矩分别乘以电驱桥速比后求和得到参考轮端需求扭矩。
48、作为本发明技术方案的进一步限定,无人驾驶模式需求扭矩计算模块包括扭矩百分比计算单元、扭矩限制计算单元和需求扭矩计算单元;
49、扭矩百分比计算单元,用于基于地图信息和行驶路况计算需求扭矩百分比;
50、扭矩限制计算单元,用于将前桥主电机当前转速对应峰值扭矩和后桥主电机当前转速对应峰值扭矩求和得到峰值扭矩限值;
51、需求扭矩计算单元,用于计算峰值扭矩限值、需求扭矩百分比和电驱桥速比的乘积得到无人驾驶模式的轮端需求扭矩。
52、作为本发明技术方案的进一步限定,滤波处理模块包括时间窗口定义单元、扭矩异常处理单元和滤波处理单元;
53、时间窗口定义单元,用于定义滑动时间窗口大小;
54、扭矩异常处理单元,用于获取滑动时间窗口内轮端需求扭矩的值,将大于扭矩限制的轮端需求扭矩的值替换成扭矩限制;存在过零点时进行过零处理;
55、滤波处理单元,用于计算滑动时间窗口内的扭矩平均值记作平滑轮端需求扭矩值,即滤波处理后的轮端需求扭矩的值;
56、作为本发明技术方案的进一步限定,人工模式需求功率计算模块包括参考功率计算单元、牵引力计算单元、待定功率计算单元和功率计算调整处理单元;
57、参考功率计算单元,用于将滤波处理后的人工驾驶模式的轮端需求扭矩t轮端结合实际车速计算参考轮端需求功率w参考=v车速*t轮端*1000/(9550*60*2*3.14*r轮胎);
58、牵引力计算单元,用于根据实际车速和车重计算轮端牵引力;
59、待定功率计算单元,用于根据轮端牵引力和实际车速建立模型计算待定轮端需求功率;
60、功率计算调整处理单元,用于计算参考轮端需求功率和待定轮端需求功率的差值;采用递归最小二乘算法根据差值的大小和方向来调整模型的参数,得到人工驾驶模式的轮端需求功率。
61、作为本发明技术方案的进一步限定,无人驾驶需求功率计算模块,具体用于将滤波处理后的无人驾驶模式的轮端需求扭矩、轮胎转速、前进后退系数相乘后除以设定常数得到无人驾驶模式的轮端需求功率。
62、第三方面,本发明技术方案提供一种电子设备,所述电子设备包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;存储器存储有可被至少一个处理器执行的计算机程序指令,所述计算机程序指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如第一方面所述的平板车轮端需求扭矩和功率计算方法。
63、第四方面,本发明技术方案还提供一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行如第一方面所述的平板车轮端需求扭矩和功率计算方法。
64、从以上技术方案可以看出,本发明具有以下优点:
65、充分考虑了人工驾驶和无人驾驶两种模式,对于人工驾驶模式,由电机转速、油门开度与速比等因素计算参考需求扭矩值,并根据实际车速和加速踏板开度建立的模型计算待定轮端需求扭矩值,采用递归最小二乘算法计算扭矩差值,来更新模型参数,求得最终轮端需求扭矩值;对于无人驾驶模式,由vcu控制器中地图信息和行驶路况,自动计算出需求扭矩百分比,由峰值扭矩限值求得轮端需求扭矩,通过上述方法计算得到最终的轮端需求扭矩值更加合理。
66、2、使得轮端需求扭矩值更加平滑,避免其剧烈变化情况,提升了纯电平板车行驶平稳性和安全性。
67、3、考虑了人工驾驶和无人驾驶两种模式,电机扭矩限值以及电机功率等,使计算出的轮端需求扭矩和功率更加合理,行驶平稳,提升了电机运行的平稳性和能源利用率,更加符合实际行驶的动力需求,达到节能高效运行效果。
68、此外,本发明设计原理可靠,结构简单,具有非常广泛的应用前景。
69、由此可见,本发明与现有技术相比,具有突出的实质性特点和显著地进步,其实施的有益效果也是显而易见的。
- 还没有人留言评论。精彩留言会获得点赞!