一种基于质量估计的无人物流车横纵向协调控制方法
本发明涉及无人车辆控制,具体涉及一种基于质量估计的无人物流车横纵向调节控制方法。
背景技术:
1、运动控制作为无人物流车实现自主行驶的关键环节,是无人物流车研究领域中的核心问题之一,指根据当前周围环境和车体位移、姿态、车速等信息按照一定的逻辑做出决策,并分别向油门、制动及转向等执行系统发出控制指令。其研究内容主要包括横向控制和纵向控制,横向控制主要研究无人物流车的路径跟踪能力,即如何控制车辆沿规划的路径行驶,并保证车辆的行驶安全性、平稳性与乘坐舒适性;纵向控制主要研究智能车辆的速度跟踪能力,控制车辆按照预定的速度巡航或与前方动态目标保持一定的距离。
2、无人物流车具有参数不确定性、时滞及高度非线性动态特性等特点,为典型的多输入—多输出复杂耦合动力学系统,如何构建可处理其时滞及高度非线性等特性的运动控制方法是实现智能车辆自主行驶的重点和难点,且始终是无人物流车研究领域的热点。
技术实现思路
1、针对现有技术的缺陷,本发明提供一种基于质量估计的无人物流车横纵向调节控制方法,确保无人物流车在期望速度下跟踪期望的路径,同时解决无人物流车进行路径跟踪控制时建立动力学模型质量作为常量处理,参数值和预期值之间存在差异影响无人物流车路径跟踪控制器跟踪精度的问题。
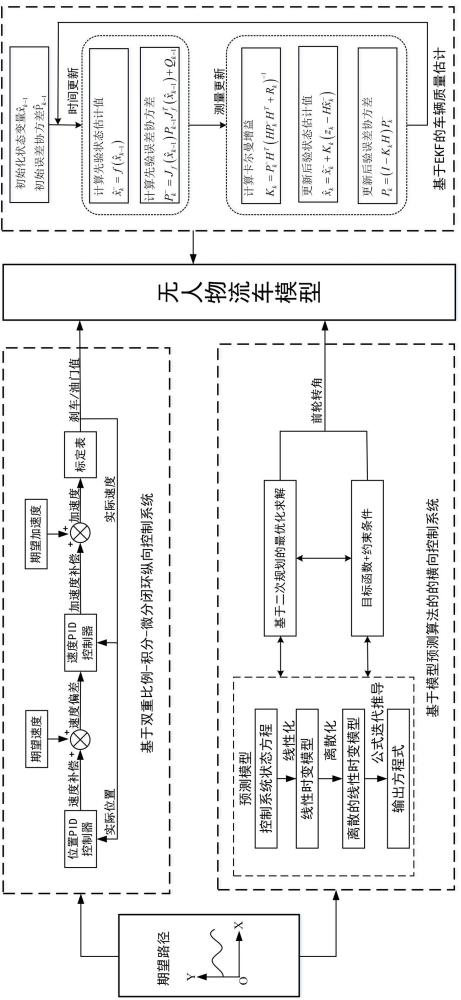
2、为了达到上述目的,本发明所采用的技术方案是:一种基于质量估计的无人物流车横纵向协调控制方法,其基于扩展卡尔曼滤波算法、模型预测控制、pid控制算法设计了基于质量估计的无人物流车横纵向协调控制系统,包括质量估计方法、纵向控制系统以及横向控制系统。
3、进一步的,所述质量估计方法包括两个计算过程:时间更新和测量更新,时间更新计算过程为向前推算先验状态估计值和先验误差协方差,测量更新计算过程为将先验状态估计和测量变量结合状态的后验估计并更新估计状态的后验误差协方差,卡尔曼增益根据测量噪声协方差以及先验误差协方差动态调节测量变量和其估计的权重,从而得到车辆质量实际值m。
4、进一步的,横向控制系统基于模型预测算法进行设计:包括将无人物流车的二自由度动力学模型作为控制系统预测模型,结合期望轨迹的位置关系转换为横向跟踪误差模型,将其线性化、离散化得到离散的线性时变模型,公式迭代推导得到输出方程式,考虑到执行器的可行性,对车辆的输出量和控制增量进行约束,通过优化求解控制量车辆前轮转角,附加变量期望横摆角速度实现无人物流车的横向稳定性控制,保证车辆准确跟踪目标路径。
5、进一步的,所述纵向控制系统采用位置-速度-姿态等多回路串级的控制方法,根据当前状态和期望状态之间的偏差实时调节执行机构,纵向控制系统包括位置闭环pid控制器和速度闭环pid控制器,首先位置闭环pid控制器以位置误差作为输入并输出速度补偿量,之后速度闭环pid控制器以速度误差作为输入并输出加速度补偿量,最后以期望加速度为目标得到当前状态下车辆需要产生的加速度控制量。
6、有益效果:1、本申请采用实际车辆总质量的估计值建立动力学模型,减小实际值与参数值之间差异对跟踪性能的影响,提高了车辆动力学模型作为模型预测控制算法的预测模型的精度。
7、2、采用横纵向协调控制方法,横向控制系统基于模型预测控制方法设计,基于线性二自由度车辆动力学模型建立横向跟踪误差模型,引入反馈校正项,提高了车辆对内部参数变化的鲁棒性与控制精度。
技术特征:
1.一种基于质量估计的无人物流车横纵向协调控制方法,其基于扩展卡尔曼滤波算法、模型预测控制、pid控制算法设计了基于质量估计的无人物流车横纵向协调控制系统,包括质量估计方法、纵向控制系统以及横向控制系统。
2.根据权利要求1所述的一种基于质量估计的无人物流车横纵向协调控制方法,其特征在于,所述质量估计方法包括两个计算过程:时间更新和测量更新,时间更新计算过程为向前推算先验状态估计值和先验误差协方差,测量更新计算过程为将先验状态估计和测量变量结合状态的后验估计并更新估计状态的后验误差协方差,卡尔曼增益根据测量噪声协方差以及先验误差协方差动态调节测量变量和其估计的权重,从而得到车辆质量实际值m。
3.根据权利要求1所述的一种基于质量估计的无人物流车横纵向协调控制方法,其特征在于,所述纵向控制系统采用位置-速度-姿态等多回路串级的控制方法,根据当前状态和期望状态之间的偏差实时调节执行机构,纵向控制系统包括位置闭环pid控制器和速度闭环pid控制器,首先位置闭环pid控制器以位置误差作为输入并输出速度补偿量,之后速度闭环pid控制器以速度误差作为输入并输出加速度补偿量,最后以期望加速度为目标得到当前状态下车辆需要产生的加速度控制量。
4.根据权利要求2所述的一种基于质量估计的无人物流车横纵向协调控制方法,其特征在于,所述横向控制系统基于模型预测算法设计,包括采用通过车辆质量实际值m建立的无人物流车二自由度动力学模型作为控制系统预测模型,考虑到执行器的可行性,对车辆的输出量和控制增量进行约束,通过持续优化求解控制量车辆前轮转角,附加变量期望横摆角速度实现无人物流车的横向稳定性控制,保证车辆准确跟踪目标路径。
技术总结
本发明涉及一种基于质量估计的无人物流车横纵向协调控制方法,针对无人驾驶智能车辆横纵向动力学之间的关联特性,设计无人驾驶车辆路径跟踪的横纵向协调控制系统。采用扩展卡尔曼滤波算法对车辆质量进行精确的识别,运用模型预测算法与双重比例‑积分‑微分算法实现对油门开度、制动压力及前轮转角的协调控制,保证路径跟踪控制的性能,该横纵向协调控制方法能够在无人驾驶物流车载重量变化下,在期望速度下稳定进行期望路径的跟踪,保证跟踪过程中的横向稳定性,提高车辆的动力性以及安全性。
技术研发人员:高建平,杨一鸣,刘攀,常永强,杜国国,苏志军,彭方方,刘铭,李玉如
受保护的技术使用者:河南科技大学
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!