一种面向智能驾驶的分布式驱制动一体化控制系统及故障处理方法
本发明涉及一种驱制动一体化控制系统及故障处理方法,特别涉及一种面向智能驾驶的分布式驱制动一体化控制系统及故障处理方法。
背景技术:
1、目前,电动化、网联化、智能化是新能源汽车产业未来发展的主要方向,智能网联式汽车将在国内广泛运行,高级自动驾驶汽车的发展前景十分广阔,同时l3级及以上的自动驾驶也对汽车底盘系统提出了新的、更高的要求,需要汽车底盘系统具有“布局灵活性、架构兼容性、控制集成性”的特点,而智能底盘系统将驾驶员操纵机构与底盘各子系统执行机构间的机械连接解耦,通过电信号控制底盘执行动作,具有响应更迅速、跟随更精确、控制更稳定的特点,是契合l3级及以上自动驾驶系统性能需求的最佳平台,因此,自动驾驶与智能底盘是相辅相成、相得益彰的关系。
2、2022年发布的乘用车电动汽车智能底盘路线图,规定了乘用车智能底盘路径,智能底盘正朝着执行器分布化、控制集成化的方向发展,并且2025年要实现x、y方向驱制动协同一体化控制,为满足上述需求,驱动系统构型正由集中驱动向分布式驱动发展,而轮毂电机(iwm)为分布式驱动的终极构型,可以增加整车动力系统布置的灵活性,并且其具有更高的转矩响应速度和响应精度,对提高车辆操纵性和稳定性具有重要意义,还可以实现机电协同制动以获得更高的能量回收效率并发挥轮毂电机制动潜力;同时制动系统也正在由传统液压制动系统朝着线控制动系统发展,实现四轮制动的独立控制,而电子机械制动系统(emb)为线控制动的终极构型,其结构更简洁明了,完全取消液压制动单元,踏板信号与执行器之间完全靠电子信号传输,制动响应速度更快,并且可以联合底盘其他系统实现车辆底盘的集成控制,是真正意义的全线控制动系统。因此,在上述智能驾驶与智能底盘的发展背景下,针对轮毂电机(iwm)+电子机械制动系统(emb)的分布式底盘终极构型,需要设计合理的控制系统以发挥轮毂电机(iwm)和电子机械制动系统(emb)的分布式驱制动的性能优势,并且设计合理的驱制动一体化协同控制算法以实现分布式底盘的驱制动一体化控制。
3、为了解决上述问题,本发明拟设计一种面向智能驾驶的分布式驱制动一体化控制系统,并且针对所提出控制系统的关键模块—驱动制动一体化控制单元提出一种面向驱制动一体化控制的控制策略架构,同时为了发挥该控制策略架构关键模块—机电协同制动控制模块的制动能量回收优势和轮毂电机制动潜力,设计一种协同制动控制策略,最后为保证车辆制动安全性,提出一种针对驱制动一体化控制单元及通讯失效的故障处理方法。
技术实现思路
1、本发明的主要目的是为了设计合理的控制系统以发挥轮毂电机和电子机械制动系统的分布式驱制动的性能优势,并且设计合理的驱制动一体化协同控制算法以实现分布式底盘的驱制动一体化控制;
2、本发明的另一个目的是提供一种针对驱制动一体化控制单元及通讯失效的故障处理方法。
3、本发明为了达到上述目的、解决上述问题,而提供的一种面向智能驾驶的分布式驱制动一体化控制系统及故障处理方法。
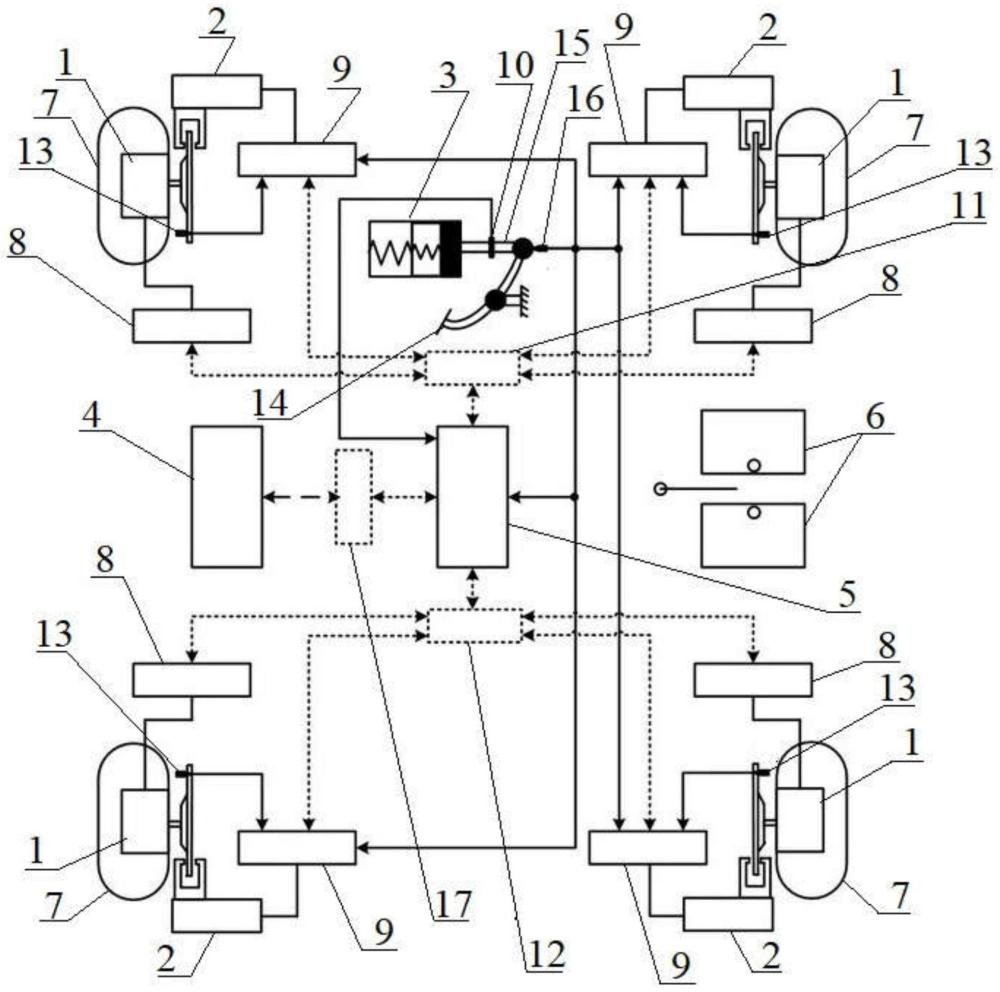
4、本发明提供的面向智能驾驶的分布式驱制动一体化控制系统包括有轮毂电机、电子机械制动系统、制动踏板感觉模拟器、自动驾驶系统控制单元、驱制动一体化控制单元和供电蓄电池,其中轮毂电机设置有四个,四个轮毂电机分别装配在车体四个驱动轮的轮毂内,每个轮毂电机均连接有轮毂电机控制单元,电子机械制动系统也设置有四个,四个电子机械制动系统分别装配在车体四个驱动轮的刹车钳上,每个电子机械制动系统均连接有电子机械制动控制单元,制动踏板感觉模拟器上的推杆装配有推杆力传感器,推杆力传感器与驱制动一体化控制单元相连接,推杆力传感器能够把采集的数据实时传输给驱制动一体化控制单元,自动驾驶系统控制单元与驱制动一体化控制单元相连接,驱制动一体化控制单元上还连接有第一can通讯模块和第二can通讯模块,其中第一can通讯模块分别与车体前方两个驱动轮上装配的轮毂电机控制单元和电子机械制动控制单元相连接,第二can通讯模块分别与车体后方两个驱动轮上装配的轮毂电机控制单元和电子机械制动控制单元相连接,供电蓄电池分别与前述电子机械制动控制单元和电子机械制动系统相连并给电子机械制动控制单元和电子机械制动系统提供电力。
5、车体四个驱动轮的四个轮毂上分别装配有轮速传感器,每个轮速传感器均与该轮毂刹车钳上装配的电子机械制动控制单元相连接,轮速传感器能够把采集的数据实时传输给电子机械制动控制单元。
6、制动踏板感觉模拟器上装配的制动踏板装置与推杆之间的连接处设置有开关信号传感器,开关信号传感器分别与车体四个驱动轮刹车钳上装配的电子机械制动控制单元相连接,开关信号传感器能够把采集的数据实时传输给四个驱动轮刹车钳上装配的电子机械制动控制单元,从而使电子机械制动控制单元控制电子机械制动系统的工作,开关信号传感器还与驱制动一体化控制单元相连接,开关信号传感器能够把采集的数据实时传输给驱制动一体化控制单元。
7、自动驾驶系统控制单元与驱制动一体化控制单元之间的连接线路上装配有网关模块。
8、供电蓄电池装配有两块。
9、上述的轮毂电机、电子机械制动系统、制动踏板感觉模拟器、自动驾驶系统控制单元、驱制动一体化控制单元、供电蓄电池、轮毂电机控制单元、电子机械制动控制单元、推杆力传感器、轮速传感器、开关信号传感器和网关模块均为现有设备的组装,因此,具体型号和规格没有进行赘述。
10、本发明提供的面向智能驾驶的分布式驱制动一体化控制系统工作原理如下:
11、本发明提供的面向智能驾驶的分布式驱制动一体化控制系统中装配的制动踏板装置与制动踏板感觉模拟器机械连接,制动踏板装置用于驾驶员输入制动意图,制动踏板感觉模拟器用于提供驾驶员制动感觉;并且在两者之间安装推杆力传感器,推杆力传感器用于采集制动踏板推杆力进而识别驾驶员制动意图;另外制动踏板装置还与开关信号传感器连接,开关信号传感器用于采集制动踏板开关信号进而识别驾驶员是否进行制动;推杆力传感器和开关信号传感器能够形成相互备份,并且推杆力传感器与开关信号传感器均与驱制动一体化控制单元进行硬线连接,驱制动一体化控制单元主要作用是通过解析推杆力传感器与开关信号传感器的信号进而通过算法识别驾驶员驾驶意图,然后再综合自动驾驶系统控制单元输入的自动驾驶系统的驾驶意图,通过内部算法计算并输出各个驱动轮iwm和emb的目标制动力矩;此外开关信号传感器还分别与四个驱动轮上装配的电子机械制动控制单元进行硬线连接,使得这四个轮端电子机械制动控制单元均能够接收驾驶员制动踏板开关信号,用于后续的故障处理功能;每个驱动轮上装配的电子机械制动控制单元均与该驱动轮上的电子机械制动系统进行硬线连接,四个电子机械制动控制单元将从驱制动一体化控制单元接收的目标电子机械制动力矩转换为目标夹紧力,并控制与其连接的电子机械制动系统进行响应,四个电子机械制动系统分别将各自内部的霍尔传感器信号反馈给与其连接的电子机械制动控制单元;每个驱动轮上装配的电子机械制动控制单元还分别与该驱动轮上装配的轮速传感器硬线连接,用于接收四个驱驱动轮上的轮速传感器的轮速信号,用于后续故障处理功能;此外四个驱动轮上装配的轮毂电机均连接有轮毂电机控制单元,四个轮毂电机控制单元将分别控制与其连接的轮毂电机响应从驱制动一体化控制单元接收的目标电机制动力矩,四个轮毂电机分别将内置轮速传感器的轮速信号反馈给与之连接的轮毂电机控制单元;两块供电蓄电池分别为四个驱动轮上的电子机械制动系统提供两路供电冗余,当任意一路供电失效时,电子机械制动系统仍然能够进行正常制动。
12、从通讯角度描述上述系统的连接关系和功用,自动驾驶系统控制单元与驱制动一体化控制单元通过网关模块进行通讯,自动驾驶系统控制单元通过以太网将其制动意图相关信号发送至网关模块,网关模块将其转成can通讯信号并发送至驱制动一体化控制单元;驱制动一体化控制单元分别连接有第一can通讯模块和第二can通讯模块,驱制动一体化控制单元支持两路can通讯,驱制动一体化控制单元通过两路can通讯分别发送电子机械制动力矩和电机制动力矩至四个驱动轮上的电子机械制动控制单元和轮毂电机控制单元。
13、正常工作时,自动驾驶系统控制单元通过对周围道路环境及行驶环境的感知,决策出对车辆的制动控制意图信号并输入至驱制动一体化控制单元,同时驾驶员通过自身对道路及环境的判断踩制动踏板,推杆力传感器和开关信号传感器将采集的传感器信号输入至驱制动一体化控制单元,驱制动一体化控制单元综合处理自动驾驶系统和驾驶员的制动意图,并根据内部算法计算出各个驱动轮的电子机械制动力矩和电机制动力矩并分别输出至四个驱动轮上装配的电子机械制动控制单元和轮毂电机控制单元,四个驱动轮上装配的电子机械制动控制单元和轮毂电机控制单元接收信号后使每个驱动轮上的电子机械制动系统与轮毂电机进行精确响应,此外,针对车辆的防抱死制动功能,各驱动轮上装配的轮毂电机通过硬线将内部轮速传感器信号反馈至各驱动轮上的轮毂电机控制单元,各驱动轮上的轮毂电机控制单元将各自轮的轮速信号通过can通讯输入至驱制动一体化控制单元,驱制动一体化控制单元对轮速信号进行分析,判断车辆是否有抱死趋势,当某一驱动轮处于抱死状态时,驱制动一体化控制单元发送该驱动轮需要减小制动力矩至该驱动轮的轮毂电机控制单元,通过控制轮毂电机的目标力矩实现防抱死功能。
14、驱制动一体化控制单元主要作用是接收自动驾驶和驾驶员的驾驶意图,通过内部算法计算并输出各个驱动轮iwm和emb的目标转矩,驱制动一体化控制单元为一种分层控制策略架构,该控制策略架构包括三个模块:人机共驾协调模块、纵侧向稳定性控制模块和机电协同制动控制模块,人机共驾协调模块主要接收驾驶员输入的制动踏板推杆力frod和方向盘转角信号δsw以及自动驾驶系统输入的目标减速度信号axa和目标前轮转角信号δfa,该模块的作用是对驾驶员和自动驾驶的驾驶意图进行识别,然后通过驾驶一致性分析和驾驶风险评估制定驾驶员和自动驾驶的驾驶权重分配规则,最后根据规则计算并输出综合目标减速度axd和目标前轮转角δfd至纵侧向稳定性控制模块,纵侧向稳定性控制模块对车辆当前稳定性进行分析,根据不同的稳定区间制定不同的控制策略,根据输入的目标减速度和目标前轮转角计算并输出纵向总需求制动力σfx和总需求横摆力矩σmz至机电协同制动控制模块,机电协同制动控制模块综合考虑各个驱动轮emb和iwm的工作性能、工作状态以及工作极限等因素,在保证制动效能的前提下以提高制动能量回收效果和发挥轮毂电机制动潜力为目标,计算出各个驱动轮emb的目标电子机械制动力矩tembi、iwm的目标电机再生制动力矩tr-iwmi、iwm的目标电机耗电制动力矩tc-iwmi并输出至各个驱动轮的电子机械制动控制单元和轮毂电机控制单元。
15、为了发挥基于iwm和emb的底盘分布式驱制动系统的制动能量回收优势并且发挥iwm的制动潜力,提出一种协同制动控制策略,该功能位于第二方面所提控制策略架构的机电协同制动控制模块,基于轮毂电机和emb的机电协同制动控制策略流程如下:
16、s1:首先接收纵侧向稳定性控制模块输入的总需求制动力和横摆力矩信号;
17、s2:计算各个驱动轮的需求制动力矩;
18、s3:计算各个驱动轮轮毂电机所能提供的最大再生制动力矩;
19、s4:计算各个驱动轮轮毂电机所能提供的最大耗电制动力矩;
20、s5:计算各个驱动轮emb所能提供的最大机械制动力矩;
21、s6:求解各个驱动轮所需目标轮毂电机再生制动力矩、目标轮毂电机耗电制动力矩和目标emb制动力矩;
22、s7:将上述目标制动力矩分别输出至各个驱动轮轮毂电机控制单元和电子机械制动控制单元。
23、以左前轮为例,步骤s6流程如下:
24、s6a:当电池soc大于阈值90%,并且车速大于5km/h时,此时电机能够进行再生制动,当左前轮轮毂电机所能提供最大再生制动力矩大于该驱动轮需求制动力矩时,则该驱动轮目标轮毂电机再生制动力矩等于该驱动轮需求制动力矩,目标轮毂电机耗电制动力矩和目标emb制动力矩均为0;
25、s6b:当左前轮需求制动力矩大于该驱动轮轮毂电机所能提供最大再生制动力矩时,则该驱动轮目标轮毂电机再生制动力矩等于该驱动轮轮毂电机所能提供最大再生制动力矩,该驱动轮目标emb制动力矩等于该驱动轮需求制动力矩减去该驱动轮目标轮毂电机再生制动力矩,目标轮毂电机耗电制动力矩为0;
26、s6c:当电池soc大于阈值90%,并且车速大于5km/h时,此时电机无法进行再生制动,进行耗电制动模式,当左前轮轮毂电机所能提供最大耗电制动力矩大于该驱动轮需求制动力矩时,则该驱动轮目标轮毂电机耗电制动力矩等于该驱动轮需求制动力矩,目标轮毂电机再生制动力矩和目标emb制动力矩均为0;
27、s6d:当左前轮需求制动力矩大于该驱动轮轮毂电机所能提供最大耗电制动力矩时,则该驱动轮目标轮毂电机耗电制动力矩等于该驱动轮轮毂电机所能提供最大耗电制动力矩,该驱动轮目标emb制动力矩等于该驱动轮需求制动力矩减去该驱动轮目标轮毂电机耗电制动力矩,目标轮毂电机再生制动力矩为0。
28、车辆在正常行驶过程中,驱制动一体化控制单元承担识别制动意图并输出控制目标的任务,并通过can通讯发送至各驱动轮电子机械制动控制单元和轮毂电机控制单元,最终实现车辆协同制动控制,当驱制动一体化控制单元或者can通讯失效时,为满足智能驾驶汽车的安全要求,仍需要车辆能够平稳停车。
29、当驱制动一体化控制单元失效时,驾驶员和自动驾驶的驾驶指令无法得到实现,车辆降级至故障驾驶状态,各个驱动轮电子机械制动控制单元使用开关信号传感器硬线输入的制动踏板开关信号,左前轮轮速传感器硬线输入的左前轮轮速信号,右前轮轮速传感器硬线输入的右前轮轮速信号,左后轮轮速传感器硬线输入的左后轮轮速信号,以及右后轮轮速传感器硬线输入的右后轮轮速信号,此时车辆控制目标是使车辆可以安全平稳的停下来,尽可能保证车辆的行驶安全性。
30、本发明提供的面向智能驾驶的分布式驱制动一体化控制系统的故障处理方法,其方法包括的步骤如下:
31、第一步、各驱动轮上装配的电子机械制动控制单元识别到驱制动一体化控制单元失效的信号,开启故障驾驶功能;
32、第二步、判断开关信号传感器的信号是否为踩下,若开关信号传感器的信号不为踩下状态,则各驱动轮上的电子机械制动控制单元不干预车辆行驶;
33、第三步、当电子机械制动控制单元识别到开关信号传感器的信号为踩下状态,继续根据各轮轮速判断各驱动轮是否处于抱死状态,如果驱动轮未处于抱死状态,各驱动轮电子机械制动控制单元分别给各自驱动轮的电子机械制动系统发送分段夹紧指令,设置各轮目标夹紧力在0至1s内为5000n,1至2s内为10000n,2至3s内为15000n,3至4s内为20000n;
34、第四步、当某一车轮发生处于抱死状态时,该所抱死车轮的电子机械制动控制单元激活内部的防抱死制动控制算法对该车轮进行调节实现防抱死制动控制;
35、第五步、当第一can通讯模块失效时,左前驱动轮和右前驱动轮上的电子机械制动控制单元无法接收驱制动一体化控制单元发送的目标电子机械制动力矩信号,左前驱动轮和右前驱动轮上的轮毂电机控制单元无法接收驱制动一体化控制单元发送的目标电机再生制动力矩信号,此时左后驱动轮和右后驱动轮上的电子机械制动控制单元仍然能够接收到驱制动一体化控制单元通过第二can通讯模块发送的目标电子机械制动力矩信号,左后驱动轮和右后驱动轮上的轮毂电机控制单元仍然能够接收到驱制动一体化控制单元通过第二can通讯模块发送的目标电机再生制动力矩信号,此时当驾驶员踩下制动踏板时,车辆的后轴仍然具有正常行车制动功能,同时前轴使用开关信号传感器硬线输入的制动踏板开关信号,左前驱动轮上的轮速传感器硬线输入的左前轮轮速信号,右前驱动轮上的轮速传感器硬线输入的右前轮轮速信号,具体第一can通讯模块故障处理流程如下:
36、步骤一、两前驱动轮的电子机械制动控制单元识别到第一can通讯模块失效的信号,开启故障驾驶功能;
37、步骤二、两前驱动轮的电子机械制动控制单元判断开关信号传感器的信号是否为踩下,若开关信号传感器不是踩下状态,则前轴两驱动轮的电子机械制动控制单元不干预车辆行驶;
38、步骤三、当前轴两个电子机械制动控制单元识别到开关信号传感器为踩下状态,继续根据两个车轮轮速判断其是否处于抱死状态,如果未处于抱死状态,前轴两驱动轮的电子机械制动控制单元分别给各自驱动轮的电子机械制动系统发送分段夹紧指令,设置各驱动轮的目标夹紧力在0至1s内为5000n,1至2s内为10000n,2至3s内为15000n,3至4s内为20000n;
39、步骤四、当前轴某一驱动轮发生处于抱死状态时,该驱动轮的电子机械制动控制单元置内部的防抱死制动控制算法使能对该驱动轮进行调节实现防抱死制动控制;
40、当后轴驱动轮处于抱死状态时,为保证驱动轮控制一致性,驱制动一体化控制单元置内部防抱死控制算法使能信号为0,同时置电子机械制动控制单元内部的防抱死制动控制算法使能信号为1,对后轴的驱动轮进行调节实现防抱死制动控制;
41、第六步、当第二can通讯模块失效时,对于前后轴的控制正好与第一can通讯模块失效时相反,当第一can通讯模块和第二can通讯模块同时失效时,前后轴电子机械制动控制单元和轮毂电机控制单元均收不到驱制动一体化控制单元的目标力矩信号,对于前后轴车轮的控制与驱制动一体化控制单元失效时的控制方式相同。
42、本发明的有益效果:
43、本发明提供的面向智能驾驶的分布式驱制动一体化控制系统及故障处理方法是针对iwm+emb底盘分布式驱制动系统提出一种面向智能驾驶的分布式驱制动一体化控制系统,能够更好的发挥出iwm+emb分布式底盘的优势和性能潜力,满足智能驾驶和智能底盘技术“布局灵活性、架构兼容性、控制集成性良好”的需求;本发明针对所提出的分布式驱制动一体化控制系统的关键模块—驱制动一体化控制单元,提出一种面向分布式驱制动一体化控制的控制策略架构,为其他科研人员探索该系统的详细控制算法提供有益指导意义;本发明针对所提出面向分布式驱制动一体化控制的控制策略架构的关键策略模块—机电协同制动控制模块,提出一种协同制动控制策略,可以尽可能的发挥该系统的制动能量回收效果,提升车辆节能性;本发明针对驱制动一体化控制单元或can通讯失效提出的故障处理方法,可以更好的满足智能驾驶的行车安全要求,实现制动功能备份,保证车辆行驶安全性。
- 还没有人留言评论。精彩留言会获得点赞!