一种基于工况自适应的滑行回收扭矩控制方法及装置与流程
本发明属于电动车控制,具体涉及一种基于工况自适应的滑行回收扭矩控制方法及装置。
背景技术:
1、目前,出于节能减排的要求和运营成本的考虑,电动车的应用越来越广泛。电动车在公交车、运输车和私家小轿车中所占的比例越来越大;还有一种应用于矿场、港口等地区的新能源特种车,正在逐步取代传统的特种车。但目前新能源特种车的主要痛点仍为续驶里程问题带来的电池成本、重量以及充电时长等一系列问题。为进一步提升能量利用率和续驶里程,在车辆滑行过程中,让电机进入发电模式,输出负扭矩,进行能量回收,在特定工况下,通过合理的能量回收扭矩控制能使续驶里程提升20%,同时进一步降低了机械制动的使用频率,提升了气泵等机械制动相关部件的寿命。
2、新能源特种车考虑电驱动系统的体积、效率等因素,一般采用多档位设计,目前主流为4挡式amt的电驱动系统。在电驱动系统进行换挡操作时,存在动力中断的情况,在滑行回收过程中,如触发降档车速,车辆会出现减速感丢失、前冲、顿挫的情况,驾驶感受变差,并且降档使得滑行回收的效率变低。同时特种车辆在作业(牵引车载货和空载、环卫车清扫)时,随着作业场景和时间的不同,车辆的质量变化、行驶工况中的坡度变化、进入滑行回收时的档位不同、当前能量管理系统的可回收功率等不同均会对滑行回收扭矩的控制产生影响。如果忽略这些工况和车辆参数的变化,按照固定的回收map进行能量回收,不仅无法有效回收能量,还会导致舒适度变差的问题。
3、现有技术一般设置多档位可调的操作开关方式提供给驾驶员,驾驶员自行判断当前工况进行人工调节滑行回收扭矩强度。一般要求驾驶员在重载下坡时开启强回收模式,在平路红绿灯时根据前向预估距离开启合适的回收强度,在上坡下关闭滑行回收等。但这种设置对驾驶员的要求较高,由于特种车辆的驾驶员往往有多年的传统车辆驾驶经验,对于这类新能源特种车特有的开关模式,驾驶员需在能理解新能源车辆能量回收特点基础上才能最大化程度利用能量回收系统。因此在实际使用中发现,驾驶员往往只采用默认回收档位或关闭能量回收,使得新能源特种车辆的能量回收优势得不到充分发挥。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供一种基于工况自适应的滑行回收扭矩控制方法及装置。
2、为了实现上述目的,本发明采用以下技术方案。
3、第一方面,本发明提供一种基于工况自适应的滑行回收扭矩控制方法,包括在整车控制器中执行的以下步骤:
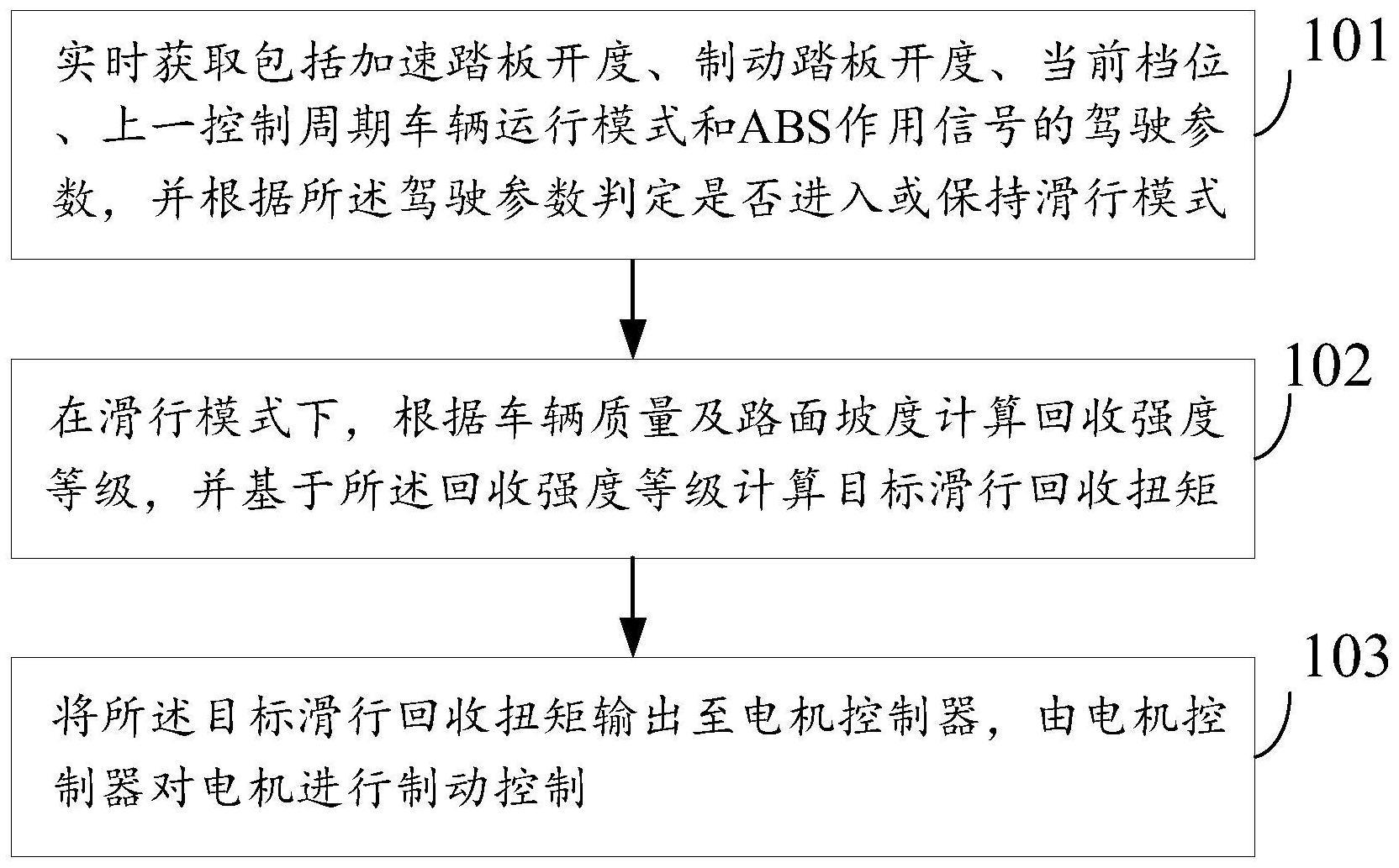
4、实时获取车辆包括加速踏板开度、制动踏板开度、当前档位、上一控制周期车辆运行模式和abs作用信号的驾驶参数,并根据所述驾驶参数判定是否进入或保持滑行模式;
5、在滑行模式下,根据车辆质量及路面坡度计算回收强度等级,并基于所述回收强度等级计算目标滑行回收扭矩;
6、将所述目标滑行回收扭矩输出至电机控制器,由电机控制器对电机进行制动控制。
7、进一步地,车辆运行模式包括:驱动模式,制动模式,巡航模式,滑行模式。
8、更进一步地,判定是否进入或保持滑行模式的方法包括:若以下5个条件同时满足,则进入或保持滑行模式:
9、条件1,加速踏板开度为零;
10、条件2,制动踏板开度为零;
11、条件3,档位为d挡;
12、条件4,上一控制周期车辆运行模式为驱动模式;
13、条件5,abs未起作用。
14、进一步地,回收强度等级的计算方法包括:
15、获取车辆质量和路面坡度;
16、基于车辆质量确定车辆质量等级;
17、基于路面坡度确定路面坡度等级;
18、根据车辆质量等级和路面坡度等级计算回收强度等级。
19、更进一步地,基于车辆质量确定车辆质量等级的方法包括:
20、若0<m<30%*mmax,则车辆质量等级为轻载;
21、若30%*mmax≤m≤70%*mmax,则车辆质量等级为中载;
22、若m>70%*mmax,则车辆质量等级为重载;
23、其中,m为车辆质量,mmax为车辆满载质量;
24、基于路面坡度确定路面坡度等级的方法包括:
25、若α<-10%*αmax,则路面坡度等级为上坡;
26、若-10%*αmax≤α<30%*αmax,则路面坡度等级为小坡;
27、若30%*αmax≤α≤70%*αmax,则路面坡度等级为中坡;
28、若α>70%*αmax,则路面坡度等级为大坡;
29、其中,α为路面坡度,αmax为最大坡度;
30、根据车辆质量等级和路面坡度等级计算回收强度等级的方法包括:设定轻载、中载和重载的车辆质量等级值x分别为0、1、2;
31、设定上坡、小坡、中坡和大坡的路面坡度等级值y分别为0、1、2、3;按下式计算回收强度等级值:
32、
33、式中,lv为回收强度等级值。
34、进一步地,目标滑行回收扭矩的计算方法包括:
35、基于车辆满载质量mmax、最大坡度αmax、最大滑行减速度amax计算车辆最大需求制动力fmax,公式如下:
36、fmax=mmax×amax+mmax×g×sinαmax-fw-ff (2)
37、式中,fw为车辆空气阻力,ff为车辆滚动阻力,fw、ff基于经验公式计算;
38、根据车辆最大需求制动力计算最大回收强度滑行扭矩tmax,公式如下:
39、
40、式中,r为车轮滚动半径,iq为主减速器速比,it为变速箱速比,η为传动效率;
41、根据最大回收强度滑行扭矩和回收强度等级计算目标滑行回收扭矩treq,公式如下:
42、
43、式中,lv为回收强度等级值,lv-max为回收强度等级值的最大值。
44、进一步地,所述方法还包括:当车辆运行模式为滑行模式时,若目标滑行回收扭矩大于0,禁止换挡操作;否则,允许变速箱控制器根据换挡控制逻辑进行换挡。
45、进一步地,所述方法还包括对目标滑行回收扭矩进行距离修正和车速修正,方法如下:
46、从障碍物检测系统获取前方障碍物与车辆的距离d,按下式计算距离修正系数f1:
47、
48、式中,d1、d2分别为近距离阈值和远距离阈值,dmax为障碍物检测系统的最大探测距离;
49、获取车辆速度v,按下式计算车速修正系数f2:
50、
51、式中,v1、v2分别为低速阈值和高速阈值;
52、按下式对目标滑行回收扭矩进行修正:
53、
54、式中,为修正后的目标滑行回收扭矩。
55、更进一步地,若计算得到的目标滑行回收扭矩大于最大回收扭矩限制值tlimit,则将目标滑行回收扭矩设定为tlimit;tlimit为机械轴反拖限制扭矩、能量管理可回收功率下的限制扭矩以及电机最大制动限制扭矩的最小值。
56、第二方面,本发明提供一种基于工况自适应的滑行回收扭矩控制装置,包括:
57、模式判定模块,用于实时获取车辆包括加速踏板开度、制动踏板开度、当前档位、上一控制周期车辆运行模式和abs作用信号的驾驶参数,并根据所述驾驶参数判定是否进入或保持滑行模式;
58、扭矩计算模块,用于在滑行模式下,根据车辆质量及路面坡度计算回收强度等级,并基于所述回收强度等级计算目标滑行回收扭矩;
59、扭矩输出模块,用于将所述目标滑行回收扭矩输出至电机控制器,由电机控制器对电机进行制动控制。
60、与现有技术相比,本发明具有以下有益效果。
61、(1)本发明同时考虑了车辆质量和路面坡度对滑行回收扭矩控制的影响,并通过合理的区间划分降低了质量和坡度参数的敏感度;
62、(2)本发明通过控制变速箱的换挡操作,避免了滑行回收过程中的降档,提升了滑行回收效率的同时,增强了滑行回收过程的驾驶体验感;
63、(3)本发明在下坡时仍能提供较为舒适的滑行减速度,相较于现有匀速滑行下坡技术,提高了车辆在不同作业场景的制动安全性;
64、(4)本发明综合考虑车速、前向障碍物检测、扭矩限制等车辆参数,提供了一种易于实现的自适应滑行回收扭矩控制方法。
- 还没有人留言评论。精彩留言会获得点赞!