重型车辆的预警处理方法、设备及存储介质与流程
本技术涉及高级驾驶辅助,尤其涉及一种重型车辆的预警处理方法、设备及存储介质。
背景技术:
1、由于重型车辆驾驶室较高,驾驶员视野有限,因此在车辆前部存在一定驾驶员视野盲区。
2、当车辆准备由静止启动时,若车辆前方盲区存在低速横穿的行人或骑行者时,由于前方驾驶员视野盲区的存在,导致驾驶员不能及时发现重型车辆对于横穿行人或骑行者的碰撞风险,造成严重的交通事故,此类场景经常出现在车辆在等路口等待红绿灯后启动的情况;另外,当车辆以低速向前行驶时,由于前方驾驶员视野和精力有限,驾驶员可能无法准确及时地发现前方静止或低速同向运动的行人或骑行者,此时车辆的自动紧急制动系统由于车速较低的缘故通常会处于功能不可用状态,从而使得重型车辆与前方同向行驶的行人或骑行者造成严重的前向碰撞风险。
3、目前针对重型车辆前向盲区的主动预警系统通常选择摄像头和雷达作为传感器,但在报警提醒方面,现有技术还处于分别依据不同传感器的监测内容进行分别报警提醒的方式,而在传感器存在异常或监测不准确的情况下,会导致报警提醒不准确,甚至错失最佳报警时机。
技术实现思路
1、本技术提供一种重型车辆的预警处理方法、设备及存储介质,用以解决在报警提醒方面,现有技术还处于分别依据不同传感器的监测内容进行分别报警提醒的方式,而在传感器存在异常或监测不准确的情况下,会导致报警提醒不准确,甚至错失最佳报警时机的问题。
2、第一方面,本技术提供一种重型车辆的预警处理方法,包括:
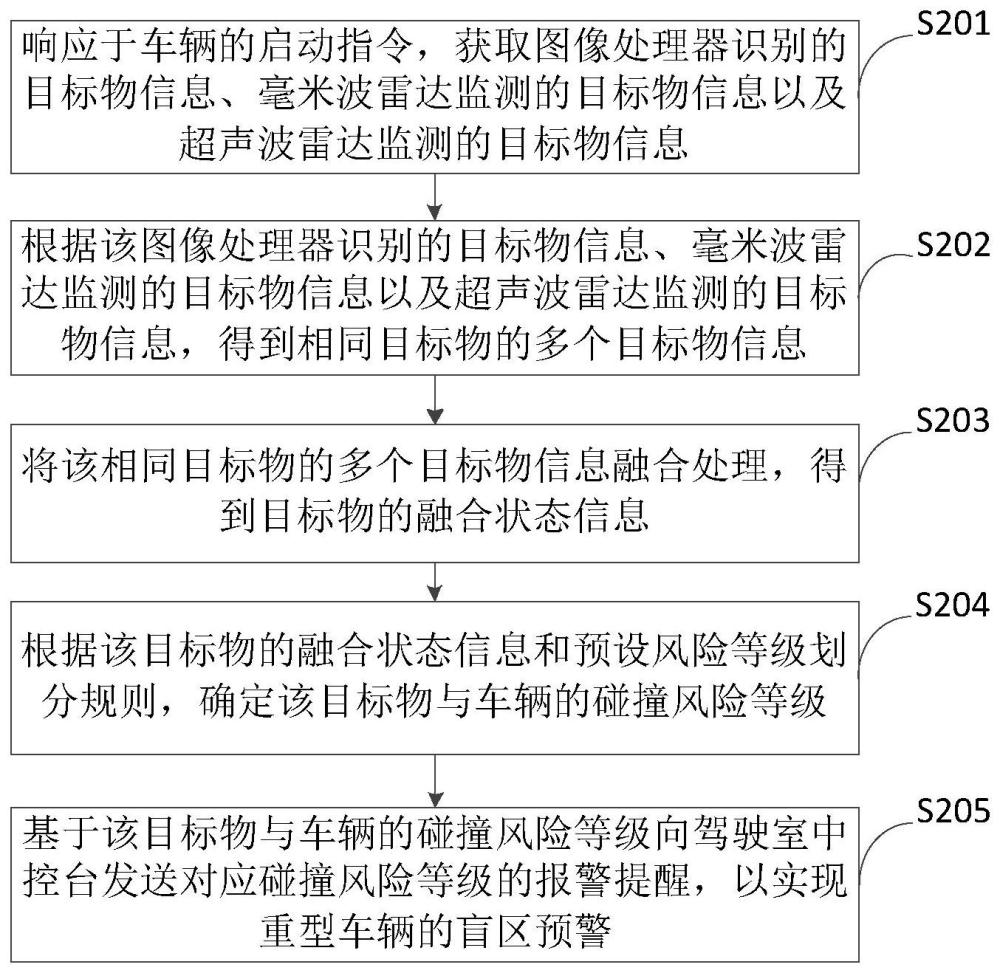
3、响应于车辆的启动指令,获取图像处理器识别的目标物信息、毫米波雷达监测的目标物信息以及超声波雷达监测的目标物信息;其中,所述目标物信息用于表示与当前车辆行驶相关的障碍物状态信息;
4、根据所述图像处理器识别的目标物信息、毫米波雷达监测的目标物信息以及超声波雷达监测的目标物信息,得到相同目标物的多个目标物信息,并将所述相同目标物的多个目标物信息融合处理,得到目标物的融合状态信息;
5、根据所述目标物的融合状态信息和预设风险等级划分规则,确定所述目标物与车辆的碰撞风险等级,并基于所述目标物与车辆的碰撞风险等级向驾驶室中控台发送对应碰撞风险等级的报警提醒,以实现重型车辆的盲区预警;其中,所述预设风险等级划分规则中存储有目标物的融合状态信息与碰撞风险等级的对应关系。
6、在一种可能的设计中,所述将所述相同目标物的多个目标物信息融合处理,得到目标物的融合状态信息,包括:
7、根据所述相同目标物的多个目标物信息中图像处理器识别的目标物信息cm、毫米波雷达监测的目标物信息cl以及超声波雷达监测的目标物信息cc,采用如下公式:
8、cj=αmcm+αlcl+αccc
9、计算目标物的融合状态信息cj;
10、其中,αm为图像处理器的信息置信度,与车辆所处的光照环境相关;αl为毫米波雷达的信息置信度,与车辆速度以及目标物的类型相关;αc为超声波雷达的信息置信度,与目标物的类型相关。
11、在一种可能的设计中,分别采用如下公式:
12、
13、
14、
15、获取所述图像处理器的信息置信度αm、毫米波雷达的信息置信度αl以及超声波雷达的信息置信度αc;
16、其中,v为基于车辆状态监测系统获取的车辆速度。
17、在一种可能的设计中,所述获取图像处理器识别的目标物信息、毫米波雷达监测的目标物信息以及超声波雷达监测的目标物信息之后,所述方法还包括:
18、获取所述图像处理器的状态监测信息;其中,所述状态监测信息包括摄像头正常、异常或光照状态异常;
19、若所述状态监测信息为摄像头异常,则将所述摄像头异常的状态监测信息发送至驾驶室中控台,以提醒及时检查故障;
20、若所述状态监测信息为光照状态异常,则关闭摄像头和图像处理器。
21、在一种可能的设计中,所述根据所述目标物的融合状态信息和预设风险等级划分规则,确定所述目标物与车辆的碰撞风险等级,包括:
22、若所述目标物的融合状态信息为其它车辆或者静止物,且目标物与本车辆存在安全距离,则确定所述目标物与车辆的碰撞风险等级为一级预警;
23、若所述目标物的融合状态信息为行人或骑行者,且目标物与本车辆同向近距离行驶,则确定所述目标物与车辆的碰撞风险等级为二级预警;
24、若所述目标物的融合状态信息为行人或骑行者,且目标物在本车辆盲区范围内,则确定所述目标物与车辆的碰撞风险等级为三级预警;
25、其中,三级预警的紧急程度大于二级预警的紧急程度,二级预警的紧急程度大于一级预警的紧急程度。
26、在一种可能的设计中,所述获取图像处理器识别的目标物信息之前,所述方法还包括:
27、获取车辆状态信息,以根据所述车辆状态信息获取图像处理器识别的目标物信息;其中,所述目标物信息与所述车辆状态信息存在相对位置关系。
28、第二方面,本技术提供一种集线处理器,包括:
29、获取模块,用于响应于车辆的启动指令,获取图像处理器识别的目标物信息、毫米波雷达监测的目标物信息以及超声波雷达监测的目标物信息;其中,所述目标物信息用于表示与当前车辆行驶相关的障碍物状态信息;
30、处理模块,用于根据所述图像处理器识别的目标物信息、毫米波雷达监测的目标物信息以及超声波雷达监测的目标物信息,得到相同目标物的多个目标物信息,并将所述相同目标物的多个目标物信息融合处理,得到目标物的融合状态信息;
31、所述处理模块,还用于根据所述目标物的融合状态信息和预设风险等级划分规则,确定所述目标物与车辆的碰撞风险等级;其中,所述预设风险等级划分规则中存储有目标物的融合状态信息与碰撞风险等级的对应关系;
32、发送模块,用于基于所述目标物与车辆的碰撞风险等级向驾驶室中控台发送对应碰撞风险等级的报警提醒,以实现重型车辆的盲区预警。
33、第三方面,本技术提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
34、所述存储器存储计算机执行指令;
35、所述处理器执行所述存储器存储的计算机执行指令,以实现重型车辆的预警处理方法。
36、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现重型车辆的预警处理方法。
37、第五方面,本技术提供一种重型车辆的预警处理系统,包括:集线处理器,固定于车辆的驾驶室中控台内部,用于实现重型车辆的预警处理方法;
38、摄像头,固定于车辆的前风挡玻璃处,用于采集车辆前方盲区范围内的图像数据;
39、图像处理器,固定于车辆的驾驶室中控台内部,用于处理摄像头采集的图像数据;
40、毫米波雷达,固定于车辆的前保险杠上方,用于采集车辆盲区范围内的障碍物信息;
41、多个超声波雷达,分别固定于车辆的前保险杠和车辆外侧的左右角的多个监测点处,用于采集车辆盲区范围内多个监测点的障碍物信息;
42、显示器,固定于车辆的驾驶室中控台上,用于展示盲区范围内的图像信息和/或报警提示信息;
43、车辆状态监测系统,固定于车辆的驾驶室中控台内部,用于处理车辆中各状态监测传感器采集的监测信号;
44、其中,所述集线处理器分别与所述图像处理器、毫米波雷达、超声波雷达、显示器以及车辆状态监测系统通信连接,所述图像处理器与所述摄像头通信连接。
45、第六方面,本技术提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现重型车辆的预警处理方法。
46、本技术提供的重型车辆的预警处理方法、设备及存储介质,通过响应于车辆的启动指令,获取图像处理器识别的目标物信息、毫米波雷达监测的目标物信息以及超声波雷达监测的目标物信息;根据所述图像处理器识别的目标物信息、毫米波雷达监测的目标物信息以及超声波雷达监测的目标物信息,得到相同目标物的多个目标物信息,并将所述相同目标物的多个目标物信息融合处理,得到目标物的融合状态信息;根据所述目标物的融合状态信息和预设风险等级划分规则,确定所述目标物与车辆的碰撞风险等级,并基于所述目标物与车辆的碰撞风险等级向驾驶室中控台发送对应碰撞风险等级的报警提醒,以实现重型车辆的盲区预警,相对于现有技术中在报警提醒方面还处于分别依据不同传感器的监测内容进行分别报警提醒的方式,而在传感器存在异常或监测不准确的情况下,会导致报警提醒不准确,甚至错失最佳报警时机的缺陷,本技术实现多种传感器监测数据的融合,提高监测准确性,降低异常情况监测不准确导致的报警异常或措施报警时机的概率。
- 还没有人留言评论。精彩留言会获得点赞!