单驱动关节的轮腿式陆空两栖机器人及其控制方法
本发明涉及机器人领域与航空,具体是一种单驱动关节的轮腿式陆空两栖机器人及其控制方法。
背景技术:
1、近年来,国内外学者们开始热衷于陆空两栖机器人的研究。轮腿式陆空两栖机器人兼具飞行能力和地面运动能力,与其他类型的陆空两栖机器人相比,其多地形适应能力更强、灵活性更高、操作更加简单。随着时代的发展,由于单纯的无人机存在着高能耗和操作空间有限的缺点,已经不能满足人们在复杂环境下执行多种作业的需求,因此需要发展新型的混合式多栖无人机。在陆空两栖机器人的发展方面,主要有被动轮式、主动轮式、足式等。
2、被动轮式的多栖无人机大都是将旋翼的拉力作为其陆地运动模式下的驱动力,在机身外侧或者旋翼外侧加装可滚动的轮毂,以实现地面运动。例如hytaq双模态移动机器人,其利用四轴飞行器实现飞行能力,并通过圆柱形笼式外壳获得地面运动的能力。类似的还有sytab陆空双模态无人机,在其旋翼外围采用被动球轮结构,增加运动灵活性的同时也起到防碰撞的效果。此外,还有geminiⅱ一个在底部装有单个被动轮的混合陆空两栖飞行器,在旋翼拉力的帮助下可实现地面运动。从对现有的一些被动式陆空两栖机器人进行总结分析发现,它们在地面运动模式下可操控性不高,由于需要旋翼提供动力,因此也只能做一些简单的地面动作,灵活性不高,本质上还不是完全的陆空两栖机器人。
3、主动轮式多栖无人机由于其地面模式运动不需要靠旋翼产生的拉力作为其驱动力,不仅能够减小更多的能量消耗,还能应对更多的复杂环境以进行更多的作业需求。例如多模态移动机器人morphobot,可以实现飞行、翻滚、爬行、蹲伏、平衡、等诸多功能,多变的结构可以适应各种复杂环境,应对多种任务,但是其整体尺寸较大,复杂多变的结构也给操纵带来了一定的困难,降低了其执行任务时的灵活性。还有混合陆空双模态机器人doublebee,其采用了双主动轮和矢量双旋翼的配置,能够穿越非结构化环境,飞越障碍物和在障碍物底下移动,以及行驶在粗糙地形中,但是它的整体尺寸较大,重量较重,且俯仰姿态的变化需要旋翼拉力平衡,腿部没有可伸缩的关节,仅靠双主动轮无法应对崎岖的道路,必须要借助旋翼拉力平衡姿态。还有一种可重构混合四旋翼flying star,在机身上有一个舵机控制着伸展机构,以实现旋翼向下折叠的结构变化,延伸角为0~55°,前面两个电机带有后出轴并且连接着齿轮,经过减速后输出到主动轮,当在地面运动时可以折叠旋翼以满足其需求,在穿越狭窄空间时亦可折叠旋翼,减小展长。由于其主动轮的特殊构成,不能重载,地面模式下可操作性不高,不能满足复杂地形的要求,且地面运动时旋翼电机负载增加,存在无用的能量消耗。甚至还有一些是将四轮驱动车底盘与多旋翼结合的陆空两栖机器人,也可以实现地面模式下的主动运动,但是其结构较为笨拙、冗余。
4、足式多栖机器人则更像是仿人机器人,例如足式多栖机器人leonardo,它的飞行功能由四旋翼实现,地面运动由两个可伸缩的多关节腿实现,可以执行行走、走钢丝、滑滑板等对稳定性和协调性有着高要求的动作,但是足式结构必然带来移动缓慢、操作困难的缺点,现阶段的发展还没有达到执行特定任务的要求。
技术实现思路
1、本发明为了解决现有技术的问题,提供了一种单驱动关节的轮腿式陆空两栖机器人及其控制方法,降低了能量损耗,延长了续航时间,可应用于道路交通监管与指挥、灾后受损房屋内的搜救、野外未知矿洞、地质的探索、隐蔽侦察、驻点长时侦察等任务场景中,在未来具有重要的意义和价值。
2、本发明提供了一种单驱动关节的轮腿式陆空两栖机器人,包括主机身模组、左倾转旋翼动力模组、右倾转旋翼动力模组、左伸缩轮腿关节动力模组、右伸缩轮腿关节动力模组和电子设备;
3、所述左倾转旋翼动力模组和右倾转旋翼动力模组沿主机身模组两侧镜像对称分布,包括旋翼组件、倾转组件、舵机组件,其中倾转组件与主机身模组固定连接,舵机组件包括通过花键连接的舵机与舵臂,舵机安装在倾转组件上,舵臂与旋翼组件连接,舵机通过舵臂驱动整个旋翼组件绕倾转组件倾转;
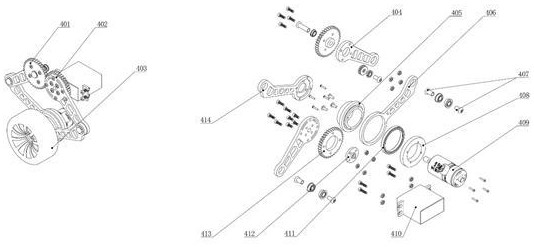
4、所述左伸缩轮腿关节动力模组和右伸缩轮腿关节动力模组沿主机身模组两侧镜像对称分布,包括车轮、无刷电机、第一电机支撑套、第二电机支撑套、后小腿、前小腿、主动摇杆、被动摇杆、主动齿轮、被动齿轮、舵盘、腿部舵机,所述无刷电机安装在前小腿上,车轮安装在无刷电机的输出轴上;所述第一电机支撑套和第二电机支撑套同轴安装在无刷电机上,后小腿同轴安装在第一电机支撑套的外圈轴承上;所述被动摇杆一端通过轴承与后小腿连接,另一端通过轴承与被动齿轮连接,被动齿轮与主机身模组固定连接并与主动齿轮啮合;所述主动摇杆一端通过轴承与前小腿连接,另一端通过轴承与主动齿轮连接,主动齿轮同轴安装有舵盘,腿部舵机固定安装在主机身模组上,腿部舵机通过舵盘驱动主动齿轮转动,从而带动从动齿轮,共同驱动伸缩轮腿关节动力模组整体进行上下伸缩运动。
5、进一步改进,所述主机身模组包括机体框架以及安装在机体框架前侧的前挡板、后侧的后挡板、顶部的加固板、内部的隔板、底部的传感器支架,其中,隔板上固定有安装板。
6、进一步改进,所述旋翼组件具体包括电机座、无刷电机和螺旋桨,无刷电机安装在电机座上,螺旋桨同轴安装在无刷电机上,电机座通过碳管与倾转组件连接并绕轴自由转动。
7、进一步改进,所述倾转组件包括倾转固定机架、倾转组固定件、连接板,舵机组件包括舵机、舵臂、舵机固定架,舵机安装在倾转固定机架的舵机槽中,舵臂安装在所述电机座的舵臂安装孔位内,舵机固定架安装在舵机外面并与倾转固定机架连接;所述连接板与所述倾转固定机架连接,倾转组固定件与所述连接板连接。
8、进一步改进,所述电子设备包括飞控、开发板、电子调速器、电池、接收机、电源模块、gps定位模块,所述飞控用于自动控制飞行器的稳定飞行,所述开发板用于接收和发送飞控发送给地面运动部件的信息,所述电子调速器用于给无刷电机供电和调整转速,所述电池用于为整架飞行器的动力系统和控制系统供电,所述接收机用于接收遥控器的信号,所述电源模块用于测量电池的电压电流以及给飞控和开发板供电,所述gps定位模块用于接收gps卫星信息,并为飞行器定位和导航。
9、本发明还提供了一种单驱动关节的轮腿式陆空两栖机器人的控制方法,包括飞行模式、地面模式和过渡模式;
10、所述飞行模式包括前后移动控制、升降运动控制、滚转运动控制和偏航运动控制;
11、所述机器人在飞行模式下,前后移动的控制方法是指,左俯仰舵机和右俯仰舵机同步前后倾转,驱动左右动力模块产生纵向水平分力,使飞行器前后移动;所述升降运动的控制方法是指,左右旋翼电机同步增减动力,使飞行器在竖直方向上产生加速度,进而实现升降运动;所述滚转运动的控制方法是指,左右旋翼电机差速增减动力,产生滚转力矩,使机身逐渐向一侧倾斜,实现滚转运动;滚转运动将产生横向水平分力,进而带动飞行器实现横向移动;所述偏航运动的控制方法是指,左俯仰舵机和右俯仰舵机向相反方向差动偏转,驱动左右动力模块分别产生相反方向的水平分力,进而实现偏航运动。
12、所述地面模式包括前后移动控制、转向运动控制、升降运动控制和滚转运动控制;
13、所述机器人在地面模式下,前后移动的控制方法是指,使机体前后倾转小角度,足部电机为使姿态保持在机械中指零度就需要产生向前或向后的加速度,从而使机器人前后运动;所述转向运动是指,左右足部电机差速旋转,形成一个差动力,进而实现转向运动;所述升降运动的控制方法是指,左右关节舵机同步旋转,使机器人在竖直方向上产生加速度,进而实现升降运动;所述滚转运动的控制方法是指,左右关节舵机不同步旋转,从而产生滚转力矩,使机身逐渐向一侧倾斜,实现滚转运动。
14、所述过渡模式包括从地面运动模式转变为空中飞行模式以及从空中飞行模式转变为地面运动模式。
15、所述机器人在过渡模式下,陆空转换的控制方法是指,在地面运动模式下解锁旋翼电机,推动油门加大拉力起飞离地后,进入高度检测模式,通过安装在机体框架底部的激光测距传感器检测机器人与地面的距离,当检测到距离大于0.2m时关闭地面运动模式下的四个执行器作用,推动拨杆关闭高度检测,进入完全的空中飞行模式;所述空陆转换的控制方法是指,当机器人处于空中飞行模式时,减小控制旋翼电机的油门,当距离地面到一定小的距离时,推动拨杆进入降落检测模式,当检测距地面高度小于0.2m打开地面运动模式下四个执行器作用,且随高度的减小四个执行器的权重因子k越来越大,执行器的作用越来越强,直到降落到地面,推动拨杆关闭降落检测功能,进入完全的地面运动模式。
16、本发明有益效果在于:
17、1.机器人的地面运动部分只有四个执行器,其中关节伸缩运动仅有两个舵机控制,解决了动力冗余的问题,降低了能量损耗,延长了续航时间;
18、2.机器人的控制运动部分使用矢量双旋翼结构,相较于传统的四旋翼具有更高的动力效率;
19、3.机器人实现了地面模式和空中模式的跨模态运动控制,扩大了机器人的使用范围;
20、4.减少了执行器的数量,减小了机器人的体积,简化了机械结构和控制算法,便于检查和维护,提升了机器人结构的安全性和可靠性;
21、5.设计了带有齿轮传动的单驱动伸缩关节结构,传动效率较高;
22、6.机器人可应用于道路交通监管与指挥、灾后受损房屋内的搜救、野外未知矿洞、地质的探索、隐蔽侦察、驻点长时侦察等任务场景中,在未来具有重要的意义和价值。
- 还没有人留言评论。精彩留言会获得点赞!