车辆控制方法、电子设备及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种车辆控制方法、电子设备及存储介质。
背景技术:
1、高精地图是服务于自动驾驶系统的专题地图,也称为自动驾驶地图、高分辨率地图,是面向自动驾驶汽车的一种新的地图数据范式。高精地图提供了更高精度、内容更为丰富的地图信息,包括且不限于道路网数据、车道网络数据、车道线以及交通标志等数据。智能驾驶车辆依靠自身的传感器获取周围环境信息,配合先进的处理器以及高精地图,可以将乘客安全舒适地导航到目标地点。目前自动驾驶领域高度依赖高精地图,但高精地图可能存在维护不及时的问题,进而可能导致自动驾驶系统无法及时更新道路信息,从而增加自动驾驶的潜在安全隐患。
技术实现思路
1、有鉴于此,本发明目的在于提供一种车辆控制方法、电子设备及存储介质,避免了第一地图更新不及时的问题,提高了变道决策的准确性和安全性。
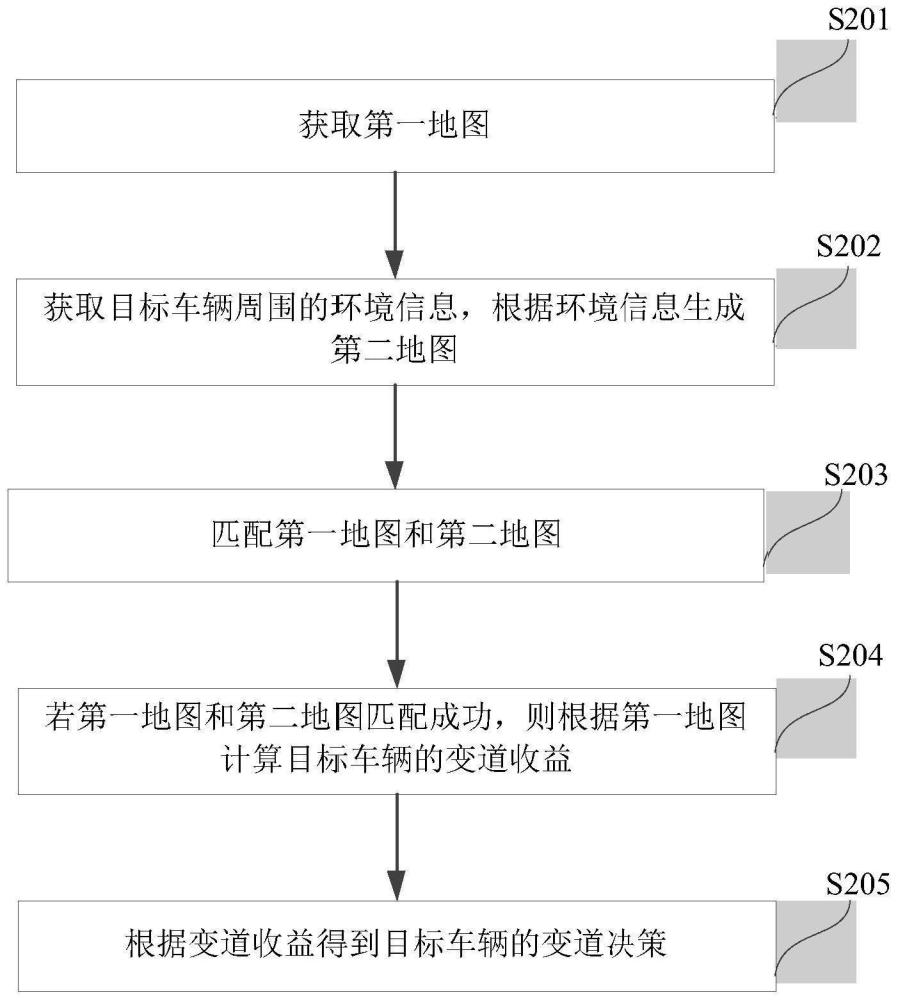
2、本申请提供一种车辆控制方法,包括:获取第一地图;
3、获取目标车辆周围的环境信息,根据所述环境信息生成第二地图;
4、匹配所述第一地图和所述第二地图;
5、若所述第一地图和所述第二地图匹配成功,则根据所述第一地图计算所述目标车辆的变道收益;
6、根据所述变道收益得到所述目标车辆的变道决策。
7、在一实施方式中,所述匹配所述第一地图和所述第二地图,包括:
8、逐帧匹配所述第一地图和所述第二地图;
9、根据所述第一地图和所述第二地图的匹配帧数输出匹配结果。
10、在一实施方式中,所述逐帧匹配所述第一地图和所述第二地图,包括:
11、确定预设空间内的第一车道和至少一第二车道,所述第一车道为所述目标车辆所在车道,所述第二车道为与所述第一车道相邻的车道;
12、计算所述第一车道的车道线在所述第一地图和所述第二地图中的第一偏差值,以及,计算所述第二车道的车道线在所述第一地图和所述第二地图中的第二偏差值;
13、根据所述第一偏差值和所述第二偏差值输出所述第一地图和所述第二地图在当前帧的匹配结果。
14、在一实施方式中,所述根据所述第一地图计算所述目标车辆的变道收益之前,所述方法还包括:
15、根据所述第一地图和所述目标车辆的位置信息分别统计所述第一车道和所述第二车道内的障碍物信息。
16、在一实施方式中,所述根据所述第一地图计算所述目标车辆的变道收益,包括:
17、根据所述目标车辆的第一变道收益、第二变道收益、第三变道收益、第四变道收益和第五变道收益中的一项或多项确定所述变道收益;
18、其中,所述第一变道收益根据所述第一车道的行车速度和所述第二车道的行车速度得出;
19、所述第二变道收益根据所述第二车道的障碍物与所述目标车辆的距离信息得出;
20、所述第三变道收益和所述第四变道收益根据所述目标车辆的驾驶习惯得出;
21、所述第五变道收益根据所述第一车道与所述第二车道之间的行车参考线得出。
22、在一实施方式中,所述根据所述变道收益得到所述目标车辆的变道决策之后,所述方法还包括:
23、若变道决策为执行变道,则基于所述第二地图生成变道轨迹;
24、控制目标车辆根据所述变道轨迹从所述第一车道行驶至所述第二车道。
25、在一实施方式中,所述变道收益得到所述目标车辆的变道决策之后,所述方法还包括:
26、重新匹配所述第一地图和所述第二地图;
27、若所述第一地图和所述第二地图匹配成功,则根据所述第一地图重新计算所述目标车辆的变道收益;
28、根据所述第二车道的变道收益确定是否变更所述目标车辆的变道决策。
29、本申请还提供一种车辆控制方法,包括:
30、获取第一地图;
31、获取目标车辆周围的环境信息,根据所述环境信息生成第二地图;
32、响应于变道指令,匹配所述第一地图和所述第二地图;
33、若所述第一地图和所述第二地图匹配成功,则根据所述第一地图计算所述目标车辆与匝道的距离信息和变道次数;
34、根据所述距离信息、所述变道次数和所述第二地图确定所述目标车辆的变道轨迹。
35、本申请还提供一种电子设备,所述电子设备包括存储器和处理器,所述处理器用于执行存储器中存储的计算机程序,以实现上述任意一项所述的车辆控制方法。
36、本申请还提供一种计算机可读存储介质,所述计算机可读存储介质在被处理器执行时,能实现上述的车辆控制方法。
37、本申请实施例提供的技术方案带来的有益效果是:
38、本发明的车辆控制方法、电子设备及计算机可读存储介质,通过结合第一地图和第二地图得到目标车辆的变道决策,避免了第一地图更新不及时的问题,提高了变道决策的准确性和安全性。
39、为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
技术特征:
1.一种车辆控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述匹配所述第一地图和所述第二地图,包括:
3.根据权利要求2所述的方法,其特征在于,所述逐帧匹配所述第一地图和所述第二地图,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述第一地图计算所述目标车辆的变道收益之前,所述方法还包括:
5.根据权利要求3所述的方法,其特征在于,所述根据所述第一地图计算所述目标车辆的变道收益,包括:
6.根据权利要求3所述的方法,其特征在于,所述根据所述变道收益得到所述目标车辆的变道决策之后,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述变道收益得到所述目标车辆的变道决策之后,所述方法还包括:
8.一种车辆控制方法,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括存储器和处理器,所述处理器用于执行存储器中存储的计算机程序,以实现根据权利要求1至8中任意一项所述的车辆控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质在被处理器执行时,能实现根据权利要求1至8任意一项所述的车辆控制方法。
技术总结
本发明提供一种车辆控制方法,包括:获取第一地图;获取目标车辆周围的环境信息,根据环境信息生成第二地图;匹配第一地图和第二地图;若第一地图和第二地图匹配成功,则根据第一地图计算目标车辆的变道收益;根据变道收益得到目标车辆的变道决策。本发明的车辆控制方法,通过结合第一地图和第二地图得到目标车辆的变道决策,解决了第一地图更新不及时的问题,提高了变道决策的准确性和安全性。
技术研发人员:李超
受保护的技术使用者:宁波路特斯机器人有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!