车辆避障碰撞检测方法、装置、计算机设备和存储介质与流程
本申请涉及自动驾驶,特别是涉及一种车辆避障碰撞检测方法、装置、计算机设备和存储介质。
背景技术:
1、自动驾驶技术,依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动操作下,自动安全地控制车辆行驶。轨迹规划作为自动驾驶技术的关键技术之一,可以在车路协同的基础上规划出有效的车辆行驶路径,通常是根据高精地图信息利用全局路径规划方法,规划出一条从起点到终点的路径。当道路前方存在碰撞目标时,车辆会基于感知系统实时获取车辆行驶前方出现的例如车辆、路障等碰撞目标的具体信息,利用局部路径规划方法,规划出一条为避免与碰撞目标发生碰撞需要行驶的路线。
2、然而,由于车辆和危险碰撞目标可能时刻处于运动的状态,其速度、加速度和位置等关键信息也会随时间变化,现有技术中通常只进行实时碰撞检测以及避障路径规划,而不考虑在避障过程中,由于危险碰撞目标的动态变化导致碰撞,大大降低避障的安全性。
3、因此,相关技术中亟需一种能够保证并提高车辆避障安全性的方式。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够保证并提高车辆避障安全性的车辆避障碰撞检测方法、装置、计算机设备和计算机可读存储介质。
2、第一方面,本申请提供了一种车辆避障碰撞检测方法。所述方法包括:
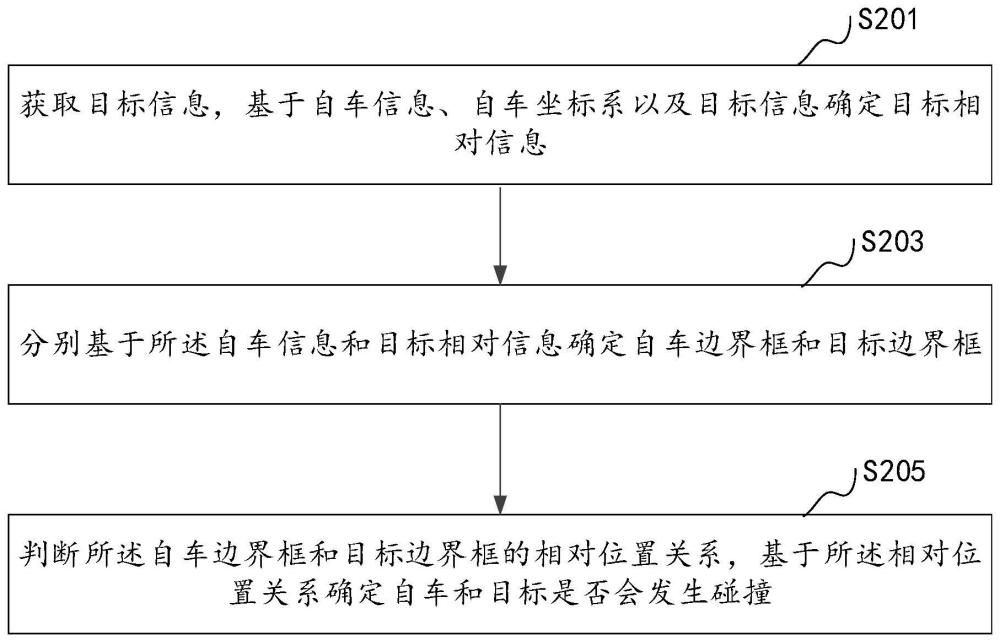
3、获取目标信息,基于自车信息、自车坐标系以及目标信息确定目标相对信息;
4、分别基于所述自车信息和目标相对信息确定自车边界框和目标边界框;
5、判断所述自车边界框和目标边界框的相对位置关系,基于所述相对位置关系确定自车和目标是否会发生碰撞。
6、可选的,在本申请的一个实施例中,所述目标信息包括目标位置和目标航向角,所述基于自车信息、自车坐标系以及目标信息确定目标相对信息包括:
7、基于自车信息和自车坐标系建立参考坐标系;
8、基于所述参考坐标系和目标信息确定目标相对位置和目标相对航向角。
9、可选的,在本申请的一个实施例中,所述分别基于自车信息和目标相对信息确定自车边界框和目标边界框包括:
10、基于所述参考坐标系和自车信息以及目标相对信息分别表示自车边界点和目标边界点;
11、基于所述自车边界点和目标边界点确定自车边界框和目标边界框。
12、可选的,在本申请的一个实施例中,所述判断所述自车边界框和目标边界框的相对位置关系,基于所述相对位置关系确定自车和目标是否会发生碰撞包括:
13、分别判断目标边界框的四条边是否与自车边界框相交,若相交,则自车与目标会发生碰撞;
14、若不相交,则判断自车边界框和目标边界框是否存在包含关系。
15、可选的,在本申请的一个实施例中,所述分别判断目标边界框的四条边是否与自车边界框相交包括:
16、若所述四条边与参考坐标系垂直,则判断所述四条边的横、纵坐标是否在自车边界框的横、纵坐标范围内。
17、可选的,在本申请的一个实施例中,所述分别判断目标边界框的四条边是否与自车边界框相交还包括:
18、若所述四条边不与参考坐标系垂直,则基于四条边构建直线方程,判断所述四条边的横坐标与自车边界框的横坐标是否存在交集,若存在交集,则基于交集和直线方程判断四条边的纵坐标是否在自车边界框的纵坐标范围内。
19、可选的,在本申请的一个实施例中,所述判断自车边界框和目标边界框是否存在包含关系包括:
20、确定所述目标边界框到坐标轴的距离,若所述距离不大于目标长度或目标宽度,则自车边界框和目标边界框存在包含关系。
21、第二方面,本申请还提供了一种车辆避障碰撞检测装置。所述装置包括:
22、信息获取模块,用于获取目标信息,基于自车信息、自车坐标系以及目标信息确定目标相对信息;
23、边界框确定模块,用于分别基于所述自车信息和目标相对信息确定自车边界框和目标边界框;
24、碰撞检测模块,用于判断所述自车边界框和目标边界框的相对位置关系,基于所述相对位置关系确定自车和目标是否会发生碰撞。
25、第三方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行上述各个实施例所述方法的步骤。
26、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述各个实施例所述方法的步骤。
27、上述车辆避障碰撞检测方法、装置、计算机设备和存储介质,首先,获取目标信息,基于自车信息以及目标信息确定目标相对信息,其中,所述目标信息包括目标位置和目标航向角,之后,分别基于所述自车信息和目标相对信息确定自车边界框和目标边界框,最后,判断所述自车边界框和目标边界框的相对位置关系,基于所述相对位置关系确定自车和目标是否会发生碰撞。也就是说,在进行车辆避障规划时,可以在规划之前或规划中,基于同一时刻的自车信息和目标信息,通过判断自车和目标之间的位置关系,确定自车和目标之间是否会发生碰撞,保证了车辆避障过程中的安全性,进一步提高了车辆自动驾驶的安全性。
技术特征:
1.一种车辆避障碰撞检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述目标信息包括目标位置和目标航向角,所述基于自车信息、自车坐标系以及目标信息确定目标相对信息包括:
3.根据权利要求2所述的方法,其特征在于,所述分别基于自车信息和目标相对信息确定自车边界框和目标边界框包括:
4.根据权利要求1所述的方法,其特征在于,所述判断所述自车边界框和目标边界框的相对位置关系,基于所述相对位置关系确定自车和目标是否会发生碰撞包括:
5.根据权利要求4所述的方法,其特征在于,所述分别判断目标边界框的四条边是否与自车边界框相交包括:
6.根据权利要求4所述的方法,其特征在于,所述分别判断目标边界框的四条边是否与自车边界框相交还包括:
7.根据权利要求4所述的方法,其特征在于,所述判断自车边界框和目标边界框是否存在包含关系包括:
8.一种车辆避障碰撞检测装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种车辆避障碰撞检测方法、装置、计算机设备和存储介质。所述方法包括:首先,获取目标信息,基于自车信息、自车坐标系以及目标信息确定目标相对信息,之后,分别基于所述自车信息和目标相对信息确定自车边界框和目标边界框,最后,判断所述自车边界框和目标边界框的相对位置关系,基于所述相对位置关系确定自车和目标是否会发生碰撞。也就是说,在进行车辆避障规划时,可以在规划之前或规划中,基于同一时刻的自车信息和目标信息,通过判断自车和目标之间的位置关系,确定自车和目标之间是否会发生碰撞,保证了车辆避障过程中的安全性,进一步提高了车辆自动驾驶的安全性。
技术研发人员:彭帅,李小刚,邹欣,潘文博,刘叶叶
受保护的技术使用者:福思(杭州)智能科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!