一种缓解车辆动态制动危险的控制方法及控制系统与流程
本发明涉及线控制动系统,特别涉及一种缓解车辆动态制动危险的控制方法及控制系统。
背景技术:
1、在线控制动系统领域,车辆的动态安全是一个非常关键的问题,特别是在电子机械制动系统emb中,由于与驾驶员完全解耦,安全性更受到关注;当emb系统在制动过程中现有电路发生故障后,emb系统可能会保持当前的制动力导致车轮发生锁死,造成车辆产生横摆力矩,影响行车安全。在直线行驶的情况下,单个前轮有残余制动力甚至抱死,会发生车辆跑偏,进而造成车辆自动转向;当转向时两个前轮有残余制动力甚至抱死,会出现推头现象;当转向时两个后轮有残余制动力甚至抱死,会出现甩尾现象;当全部车轮抱死,会出现转向失败的问题。因此,在实际制动时,一方面要保持动态中的车辆能够有效的制动,另外一方面在任意车轮制动系统失效后,残余的制动力还能自动消除,避免使车轮一直处于不可控制的危险制动状态。
2、现有技术的设计方向是在单轮制动系统中采用冗余设计,其目的是保证该制动器不失效;即当主电路发生故障后,备份电路接替主电路进行工作,达到安全的目的。但传统的设计方法会导致整个系统空间占用率过大,电路设计复杂且成本高,同时使用功耗高。因此,本申请研制了一种缓解车辆动态制动危险的控制方法,以解决现有技术中存在的问题。
技术实现思路
1、本发明目的是:提供一种缓解车辆动态制动危险的控制方法及控制系统,采用非冗余设计的反转电路模块控制机制,独立于现有主电路模块控制机制,以解决现有技术中整个系统空间占用率过大,成本高,以及使用功耗高的问题。
2、本发明的技术方案是:一种缓解车辆动态制动危险的控制方法,包括:
3、emb系统的主电路模块发生异常,发出制动失效信息或失效无法发出信号,其中,制动失效信息通过can通讯反馈至域控制器;
4、域控制器接收或判断异常信息,并发出帧信号用于激活对应emb系统内的反转电路模块,使所述反转电路模块介入控制,并同时触发集成于所述反转电路模块内的延时电路模块;
5、所述反转电路控制电机反转,并通过所述延时电路模块使所述电机在预设时间内切断电流关闭。
6、优选的,所述主电路模块常态工作时,所述反转电路模块处于非通电状态;
7、所述主电路模块发出制动失效信息或失效无法发出信号时,所述反转电路模块被激活并处于通电状态。
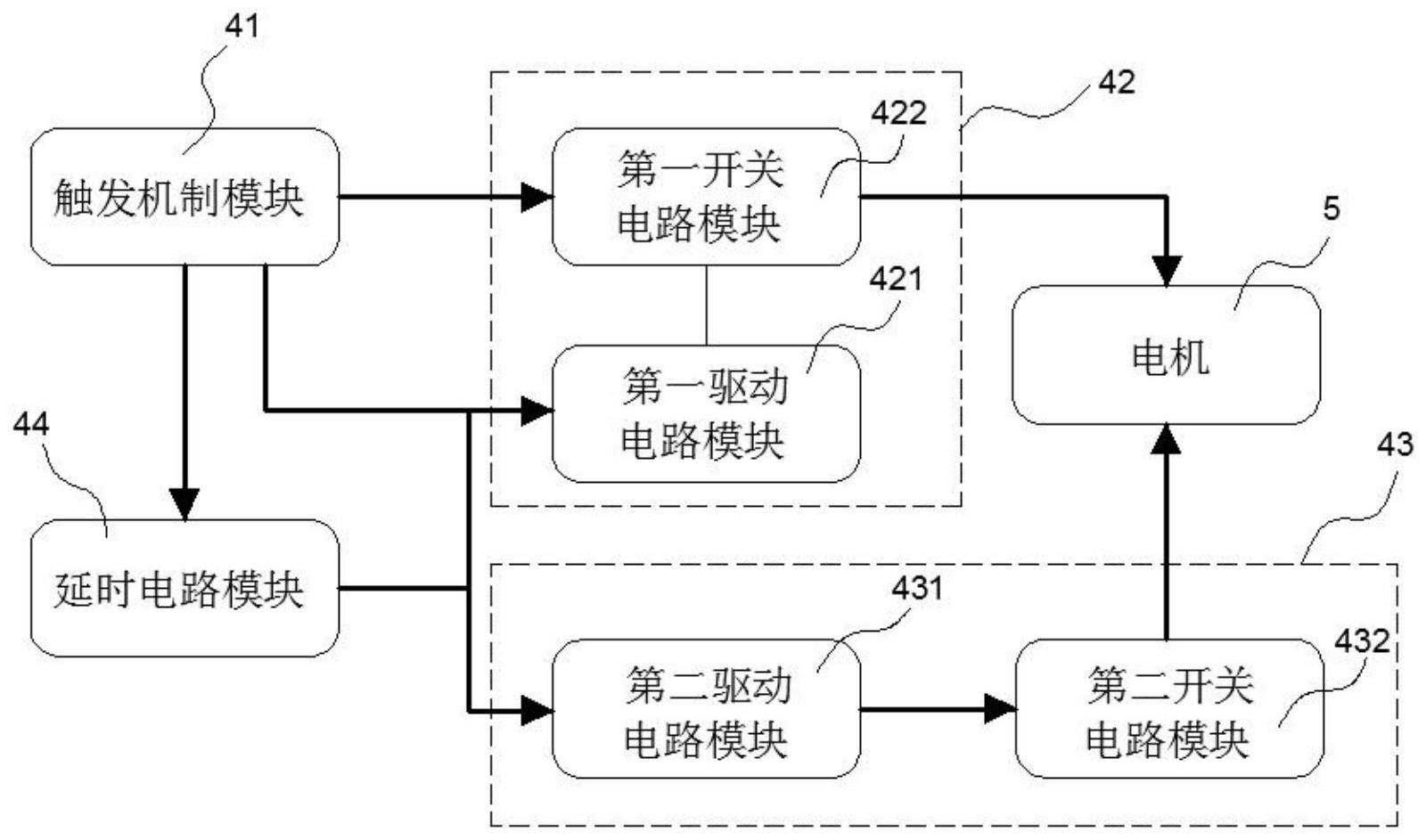
8、优选的,所述反转电路通过植入其内部的触发机制模块进行激活,触发两组电路模块工作,并驱动所述电机反转;
9、所述电路模块包括驱动电路模块及开关电路模块,所述驱动电路模块接收所述触发机制模块的信号,并控制所述开关电路模块,使所述开关电路模块控制所述电机工作。
10、优选的,所述延时电路模块从所述反转电路模块被激活通电时开始计时,并在设定时间后发送信号关闭所述驱动电路模块,致使所述开关电路模块被关闭。
11、本申请还公开了一种缓解车辆动态制动危险的控制系统,包括域控制器,以及分布式的emb系统;所述域控制器与所述emb系统通过can网络进行通讯。
12、优选的,所述emb系统包括主电路模块及反转电路模块;
13、所述反转电路模块用于控制电机,并驱动其反转;所述反转电路模块包括触发机制模块、第一开关电路模块、第二开关电路模块、第一驱动电路模块、第二驱动电路模块,以及延时电路模块;其中,第一驱动电路模块、第一开关电路模块构成第一电路模块;第二驱动电路模块、第二开关电路模块构成第二电路模块。
14、优选的,所述延时电路模块、第一驱动电路模块、第二驱动电路模块分别与所述触发机制模块信号连接,接收所述触发机制模块的响应信号;所述延时电路模块还与所述第一驱动电路模块、第二驱动电路模块信号连接,反馈控制终止信号;
15、所述第一开关电路模块与所述第一驱动电路模块信号连接,形成控制电机工作的第一路信号;所述第二开关电路模块与所述第二驱动电路模块信号连接,形成控制电机工作的第二路信号。
16、与现有技术相比,本发明的优点是:
17、(1)本申请针对车辆分布式的emb系统,设计出自动识别任意车轮制动系统失效的机制,并且通过域控制器及时解除该失效轮的制动力,以避免干扰整车的运动,达到可靠、安全的目的。
18、(2)采用非冗余设计的反转电路模块控制机制,独立于现有主电路模块控制机制,降低电路复杂度和成本,减小了体积;同时,由于主电路模块与反转电路模块相对独立设置,反转电路模块在正常情况下处于关闭状态,只在制动失效的情况下被唤醒,介入控制,进而增设的反转电路模块几乎零功耗。
19、(3)反转电路模块是否介入,由域控制器进行决策和控制,提高可靠性,并且根据整车的动态和制动的状态,决定介入的时机;并在介入时结合延时电路模块,控制解锁终止,保证可靠性。
20、(4)反转电路模块由触发机制模块、第一电路模块、第二电路模块,以及延时电路模块组成,结构设计简单,成本低;结合相对独立控制的主电路模块,整个控制系统空间占用率小。
技术特征:
1.一种缓解车辆动态制动危险的控制方法,其特征在于,包括:
2.根据权利要求1所述的一种缓解车辆动态制动危险的控制方法,其特征在于:所述主电路模块常态工作时,所述反转电路模块处于非通电状态;
3.根据权利要求2所述的一种缓解车辆动态制动危险的控制方法,其特征在于:所述反转电路通过植入其内部的触发机制模块进行激活,触发两组电路模块工作,并驱动所述电机反转;
4.根据权利要求3所述的一种缓解车辆动态制动危险的控制方法,其特征在于:所述延时电路模块从所述反转电路模块被激活通电时开始计时,并在设定时间后发送信号关闭所述驱动电路模块,致使所述开关电路模块被关闭,控制所述电机停止工作。
5.一种缓解车辆动态制动危险的控制系统,其特征在于:采用如权利要求1-4任一项所述的缓解车辆动态制动危险的控制方法进行控制,包括域控制器,以及分布式的emb系统;所述域控制器与所述emb系统通过can网络进行通讯。
6.根据权利要求5所述的一种缓解车辆动态制动危险的控制系统,其特征在于:所述emb系统包括主电路模块及反转电路模块;
7.根据权利要求6所述的一种缓解车辆动态制动危险的控制系统,其特征在于:所述延时电路模块、第一驱动电路模块、第二驱动电路模块分别与所述触发机制模块信号连接,接收所述触发机制模块的响应信号;所述延时电路模块还与所述第一驱动电路模块、第二驱动电路模块信号连接,反馈控制终止信号;
技术总结
本发明涉及线控制动系统技术领域,具体涉及一种缓解车辆动态制动危险的控制方法及控制系统,当EMB系统的主电路模块发生异常,发出制动失效信息或失效无法发出信号,域控制器通过CAN通讯接收信息或判断异常信息,并发出帧信号用于激活对应EMB系统内的反转电路模块,使反转电路模块介入控制,并同时触发集成于反转电路模块内的延时电路模块;反转电路控制电机反转,并通过延时电路模块在预设时间内切断电机电流,关闭控制电路。控制系统包括域控制器以及分布式的EMB系统,通过CAN网络通讯。本申请针对分布式的EMB系统,设计出自动识别任意车轮制动系统失效的机制,并通过域控制器及时解除该失效轮的制动力,以避免干扰整车的运动,达到可靠、安全的目的。
技术研发人员:贺启富,杨昆
受保护的技术使用者:苏州坐标系智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!