一种分布式电动汽车横摆稳定性控制系统
本发明涉及车辆主动安全控制,特别是涉及一种分布式电动汽车横摆稳定性控制系统。
背景技术:
1、采用基于轮毂电机驱动的分布式驱动电动汽车可有效降低排放污染,获得更高的能量利用率,有利于缓解能源短缺、环境污染问题。由于轮毂电机有独立可控,传动效率高,扭矩响应精确迅速的特点,使得基于轮毂电机驱动的分布式驱动电动汽车更有可能实现一些高性能、先进车辆动力学控制,通过合理控制各个轮毂电机,可以使基于轮毂电机的分布式驱动电动汽车拥有比传统汽车更加优秀的行驶稳定性与安全性。横摆稳定性控制可以跟踪横摆角速度理想值的同时抑制质心侧偏角变大,减少车辆失稳情况的发生,同时当车辆发生失稳时及时纠正,使车辆从非稳定区域转回稳定区域。但是现有的横摆稳定性控制方法对变化工况的鲁棒性较差,未实现对车辆横、纵向运动以及路面情况的综合考虑。因此如何综合考虑车辆横、纵向运动以及路面情况以提升横摆稳定性控制方法对变化工况的鲁棒性问题亟待解决。为此,本发明提出了一种分布式电动汽车横摆稳定性控制系统。
技术实现思路
1、本发明的目的在于提供一种分布式电动汽车横摆稳定性控制系统,以解决上述背景技术中所面临的问题。
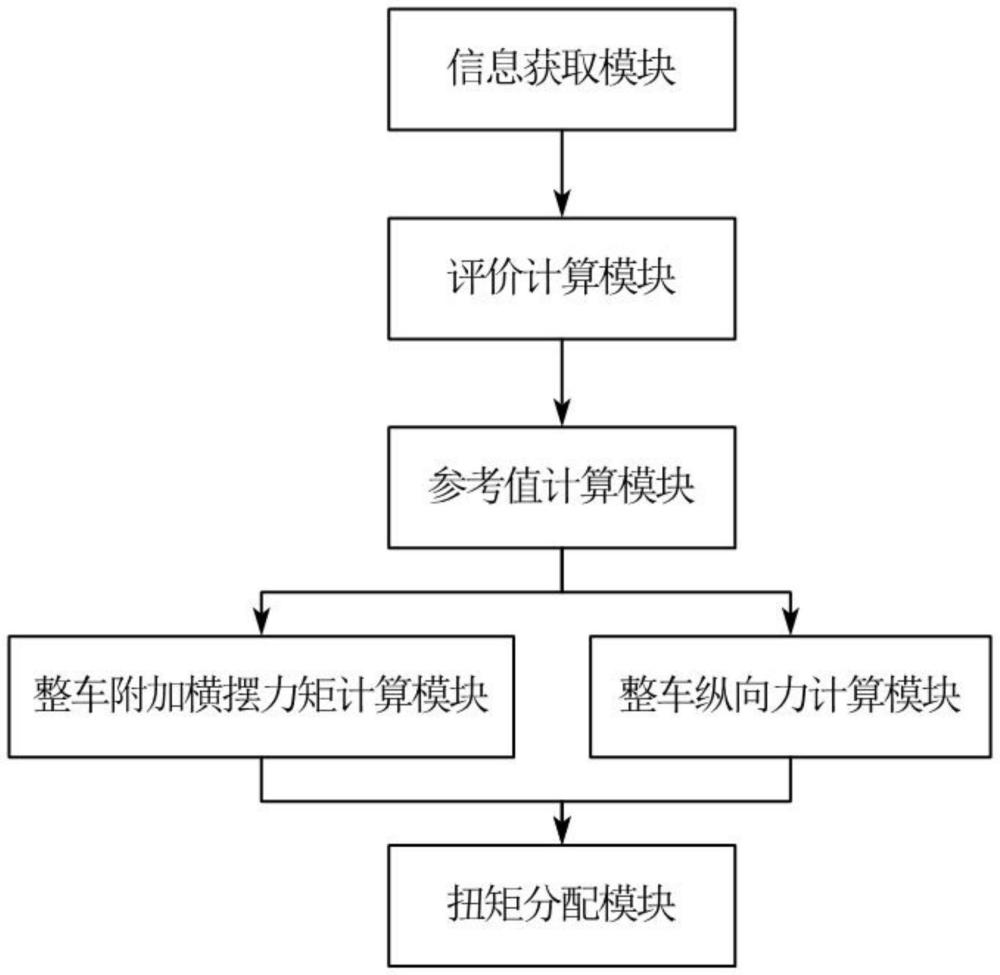
2、为实现上述目的,本发明提供如下技术方案:一种分布式电动汽车横摆稳定性控制系统,包括信息获取模块、评价计算模块、参考值计算模块、整车附加横摆力矩计算模块、整车纵向力计算模块、扭矩分配模块。
3、所述信息获取模块用于获取第一类参数、第二类参数和第三类参数;
4、所述第一类参数包括车辆纵向车速vx、车辆纵向加速度ax和车辆各车轮轮速wi,i=fl,fr,rl,rr,分别表示左前轮、右前轮、左后轮、右后轮;
5、所述第二类参数包括车辆侧向速度vy、车辆前轮转角占、车辆侧向加速度ay、车辆质心侧偏角β、车辆横摆角速度γ和车辆载荷转移率ltr;
6、所述第三类参数包括车辆所在路面的纵向坡度p1、车辆所在路面的道路曲率ρ、车辆所在路面的横向坡度p2和车辆所在路面的路面附着系数μ;
7、所述评价计算模块用于依据第一类参数计算第一类参数评价因子j1,依据第二类参数计算第二类参数评价因子j2,依据第三类参数计算第三类参数评价因子j3;
8、所述第一类参数评价因子j1如下式所示:
9、j1=j1(vx,ax,w1,w2,w3,w4),
10、所述第二类参数评价因子j2如下式所示:
11、j2=j2(vy,ay,γ,δ,β,ltr),
12、所述第三类参数评价因子j3如下式所示:
13、j3=j3(p1,p2,ρ,μ),
14、所述第一类参数评价因子j1用于反映车辆的纵向运动情况,所述第二类参数评价因子j2用于反映车辆的横向运动情况,所述第三类参数评价因子j3用于反映车辆当前所在的路面情况;
15、所述评价计算模块用于依据所述第一类参数评价因子j1、第二类参数评价因子j2以及第三类参数评价因子j3计算工况状态评价因子j;
16、所述工况状态评价因子j用于综合反映车辆当前所在的路面情况和车辆的运动情况;
17、所述参考值计算模块用于依据所述第一类参数中的车辆纵向车速vx、第二类参数中的车辆前轮转角δ和第三类参数中的车辆所在路面的路面附着系数μ计算质心侧偏角参考值βd和横摆角速度参考值γd;
18、所述整车附加横摆力矩计算模块用于依据所述质心侧偏角参考值βd、横摆角速度参考值γd、第一类参数中的车辆纵向车速vx和第二类参数中的车辆前轮转角δ建立系统稳态方程、误差模型、预测方程、性能函数及约束条件,进行二次规划求解,计算整车附加横摆力矩δm;
19、所述整车纵向力计算模块用于设定参考车速vref,并依据第一类参数中的车辆纵向车速vx和设定的参考车速vref计算整车期望总纵向力fx;
20、所述扭矩分配模块用于依据状态评价因子j判断并选择整车附加横摆力矩δm和整车期望总纵向力fx的扭矩分配模式,计算实现稳定性控制的各车轮期望扭矩tij,ij=fl,fr,rl,rr,分别表示左前轮、右前轮、左后轮、右后轮。
21、所述依据第一类参数计算第一类参数评价因子j1,具体包括:
22、依据以下公式可计算第一类参数评价因子j1:
23、
24、式中,α1,α2,α3,α4为加权系数,α1+α2+α3+α4=1。
25、所述依据第二类参数计算第二类参数评价因子j2,具体包括:
26、依据以下公式可计算第二类参数评价因子j2:
27、
28、式中,α5,α6,α7为加权系数,α5+α6+α7=1。
29、所述依据第三类参数计算第三类参数评价因子j3,具体包括:
30、依据以下公式可计算第三类参数评价因子j3:
31、
32、式中,α8,α9为加权系数,α8+α9=1。
33、所述依据第一类参数评价因子j1、第二类参数评价因子j2以及第三类参数评价因子j3计算工况状态评价因子j,具体包括:
34、
35、式中,αz为第一类参数评价因子j1对应的工况状态评价因子j计算加权值,αc第二类参数评价因子j2对应的工况状态评价因子j计算加权值,αl为第三类参数评价因子j3对应的工况状态评价因子j计算加权值,αz+αc+αl=1。
36、所述参考值计算模块用于依据所述第一类参数中的车辆纵向车速vx、第二类参数中的车辆前轮转角δ和第三类参数中的车辆所在路面的路面附着系数μ计算质心侧偏角参考值βd和横摆角速度参考值γd,具体包括:
37、质心侧偏角参考值βd为:
38、
39、横摆角速度参考值γd为:
40、
41、式中,a表示车辆前轴到质心的距离,b表示车辆后轴到质心的距离,为稳定性因素,l表示轴距,m表示车辆质量,k1、k2分别为前后轴侧偏刚度,g表示重力加速度。
42、所述整车附加横摆力矩计算模块,具体包括:
43、稳态方程计算单元,用于依据所述质心侧偏角参考值βd、横摆角速度参考值γd、第一类参数中的车辆纵向车速vx和第二类参数中的车辆前轮转角δ以及汽车二自由度模型到系统稳态方程:
44、
45、式中,iz表示车辆绕z轴转动惯量;
46、误差模型计算单元,用于计算状态量为质心侧偏角误差δβ和横摆角速度误差δγ,控制量为整车附加横摆力矩δm的误差模型:
47、
48、式中,u=δm,δm表示整车附加横摆力矩;
49、预测方程计算单元,用于将误差模型离散化得到预测方程:
50、x(k+1)=akx(k)+bku(k),
51、式中:ak=a·ts+i,bk=b·ts,ts为采样时间,k为当前采样时刻,k+1为下一采样时刻;
52、性能函数及约束条件构建单元,用于根据状态量、控制量以及控制量约束构建优化问题的性能函数和约束条件:
53、性能函数表达式如下:
54、
55、式中,np,nc分别为预测步长和控制步长;x(k+i|k)为k时刻预测的k+i时刻的状态量,u(k+i|k)为k时刻预测的k+i时刻的控制量,q和r分别代表系统状态量和控制量的权重系数矩阵;
56、约束条件为控制器输出值,即整车附加横摆力矩的值,表示为:
57、umin≤u(k+i|k)≤umax,i=0,1,…nc-1,
58、式中:umin,umax分别表示控制器输出u的最小值以及最大值;
59、二次规划求解单元,将上述优化问题转化为二次规划问题并求解,得到整车附加横摆力矩δm。
60、所述扭矩分配模块,具体包括:
61、分配模式选择单元和扭矩分配单元;
62、分配模式选择单元,用于依据工况状态评价因子j选择扭矩分配单元的分配模式;扭矩分配单元包括三级分配模式:第一级扭矩分配模式、第二级扭矩分配模式、第三级扭矩分配模式;通过设计分配模式选择单元的第一级扭矩分配模式控制因子γ1、第二级扭矩分配模式控制因子γ2、第三级扭矩分配模式控制因子γ3来实现分配模式的切换选择,其中0<γ1<γ2<γ3;当工况状态评价因子j介于0<γ1时,分配模式选择单元选择扭矩分配单元的分配模式为第一级扭矩分配模式;当工况状态评价因子j介于γ1<γ2时,分配模式选择单元选择扭矩分配单元的分配模式为第二级扭矩分配模式;当工况状态评价因子j介于γ2<γ3时,分配模式选择单元选择扭矩分配单元的分配模式为第三级扭矩分配模式;
63、扭矩分配单元,用于依据分配模式选择单元选择的扭矩分配单元的分配模式、整车附加横摆力矩δm和整车期望总纵向力fx计算各车轮期望扭矩tij,ij=fl,fr,rl,rr,分别表示左前轮、右前轮、左后轮、右后轮。
64、所述扭矩分配单元,具体包括:
65、第一级扭矩分配模式,用于当分配模式选择单元选择扭矩分配单元的分配模式为第一级扭矩分配模式时,依据整车附加横摆力矩δm和整车期望总纵向力fx计算各车轮期望扭矩tij,ij=fl,fr,rl,rr,分别表示左前轮、右前轮、左后轮、右后轮;
66、其中,各车轮期望扭矩tij为:
67、
68、式中,fl,fr,rl,rr,分别表示左前轮、右前轮、左后轮、右后轮,r表示车轮有效半径,d表示轮距;
69、第二级扭矩分配模式,用于当分配模式选择单元选择扭矩分配单元的分配模式为第二级扭矩分配模式时,依据整车附加横摆力矩δm和整车期望总纵向力fx计算各车轮期望扭矩tij,ij=fl,fr,rl,rr,分别表示左前轮、右前轮、左后轮、右后轮;
70、其中,各车轮期望扭矩tij为:
71、
72、式中:hcg表示车辆质心高度,ax表示车辆的纵向加速度;
73、第三级扭矩分配模式,用于当分配模式选择单元选择扭矩分配单元的分配模式为第三级扭矩分配模式时,依据整车附加横摆力矩δm和整车期望总纵向力fx计算各车轮期望扭矩tij,ij=fl,fr,rl,rr,分别表示左前轮、右前轮、左后轮、右后轮;
74、其中,各个车轮期望纵向力fxij可以通过求解以下二次规划优化问题得到:
75、
76、式中:minjd表示优化问题的目标函数,ij=fl,fr,rl,rr,分别表示左前轮、右前轮、左后轮、右后轮,cij表示各个车轮的利用率权重系数,fzij表示各个车轮的垂直载荷;
77、进而通过以下公式可得到各车轮期望扭矩tij:
78、tij=fxij·r,
79、式中:r表示轮胎有效半径。
80、所述各个车轮的利用率权重系数cij,具体包括:
81、左前轮、右前轮利用率权重系数分别为cfl=cfr=1;
82、依据以下公式可计算右后轮、左后轮的利用率权重系数crr,crl:
83、
84、式中,δγ为横摆角速度误差。
85、与现有技术相比,本发明的有益效果:
86、本发明提供的一种分布式电动汽车横摆稳定性控制系统,可通过信息获取模块获取第一类参数、第二类参数和第三类参数;通过评价计算模块计算第一类参数评价因子以反映车辆的纵向运动情况、计算第二类参数评价因子以反映车辆的横向运动情况、计算第三类参数评价因子以反映车辆当前所在的路面情况,计算工况状态评价因子以综合反映车辆当前所在的路面情况和车辆的运动情况。
87、本发明的扭矩分配模块包括分配模式选择单元和扭矩分配单元,扭矩分配单元包括三级扭矩分配模式:第一级扭矩分配模式、第二级扭矩分配模式、第三级扭矩分配模式;通过设计分配模式选择单元的第一级扭矩分配模式控制因子、第二级扭矩分配模式控制因子、第三级扭矩分配模式控制因子来实现分配模式的切换选择。
88、扭矩分配模块根据状态评价因子判断并选择整车附加横摆力矩δm和整车期望总纵向力fx的扭矩分配模式,计算实现稳定性控制的各车轮期望扭矩。
- 还没有人留言评论。精彩留言会获得点赞!