车辆控制方法、车辆及介质与流程
本技术涉及车辆控制,尤其涉及车辆控制方法、车辆及介质。
背景技术:
1、随着车辆技术的发展,越来越多的辅助驾驶功能被开发出来,比如并线辅助、上坡辅助、自动驻车、单踏板模式等功能。
2、在现有技术中,自动驻车作为一个相对成熟的传统辅助功能,激活条件是需要驾驶员踩下制动踏板后经过综合判断才能激活并被启动。具体来说,在检测到驾驶员踩下制动踏板后,还需要进一步判断车辆是否真的停止。只有当确定车辆真的停止(也就是车辆的行驶速度接近零的时候)的情况下才能启动自动驻车功能。在判断车辆是否静止的时候,通常是利用轮速传感器检测,然而,仅仅依靠轮速传感器所得到的检测结果不够精准,难以满足实际需求。
技术实现思路
1、本技术实施例提供车辆控制方法、车辆及介质,用以提升车辆自动驻车功能稳定性的方案。
2、第一方面,本技术实施例提供一种车辆控制方法,包括:
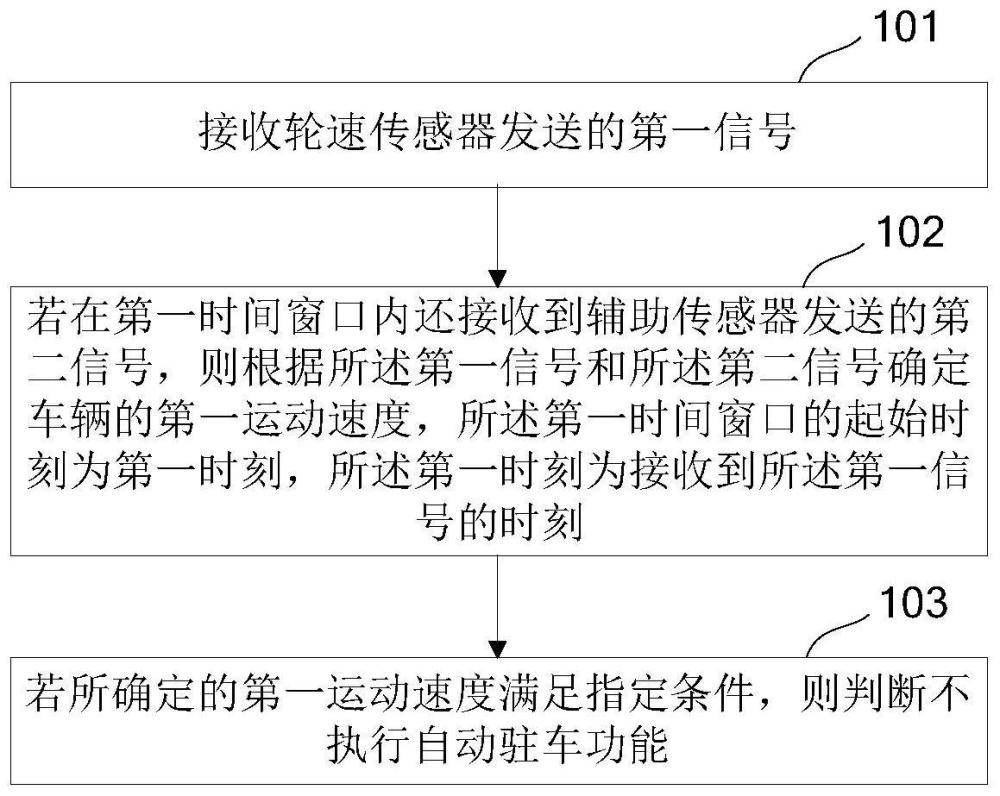
3、接收轮速传感器发送的第一信号;
4、若在第一时间窗口内还接收到辅助传感器发送的第二信号,则根据所述第一信号和所述第二信号确定车辆的第一运动速度,所述第一时间窗口的起始时刻为第一时刻,所述第一时刻为接收到所述第一信号的时刻;
5、若所确定的第一运动速度满足指定条件,则判断不执行自动驻车功能。
6、车辆处于静止状态(可能静止在平面或者斜坡),当驾驶员踩下加速踏板的时候,自动驻车功能退出。由于此时车辆移动速度可能很慢,无法及时检测到车辆运动速度或者车辆轮速,因此,在接收到车辆轮速传感器的第一信号之后,进一步等待是否接收到辅助传感器提供的第二信号。若接收到第二信号,进一步利用第一信号和第二信号来计算车辆移动过程中的第一运动速度,以便利用第一运动速度判断车辆是否发生移动。具体来说,判断第一运动速度是否满足指定条件(比如,第一运动速度大于某个速度阈值)则可知车辆处于运动状态,将不再执行自动驻车功能。通过上述方式,利用来自不同传感器的信号(也就是第一信号和第二信号)快速判断车辆是否发生移动,使得判断结果更加准确、更加及时。
7、可选地,上述方法可以应用于支持单踏板模式的车辆。在启用单踏板模式功能的时候,通过上述方法能够从根本上保证自动驻车功能稳定激活、稳定退出。
8、可选地,所述辅助传感器包括:加速度传感器、陀螺仪中至少一种,以用于辅助检测车辆运动状态。
9、在实际应用中,单独利用轮速传感器虽然能够检测车辆轮速,但是需要在一段时间内才能够判断车辆是否发生运动。因此,可以利用辅助传感器来辅助判断车辆是否运动,综合不同传感器判断更加灵敏、准确。
10、可选地,接收轮速传感器发送的第一信号之后,所述方法还包括:
11、若在第二时间窗口内接收到所述轮速传感器发送的第三信号,则根据所述第一信号和所述第三信号确定车辆的第二运动速度;
12、若所述第一运动速度和所述第二运动速度满足所述指定条件,则判断不执行自动驻车功能。
13、为了避免判断错误,或者为了提升车辆速度判断准确率,可以在第二时间窗口继续等待接收轮速传感器的第三信号,进而,利用第一信号和第三信号计算得到第二运动速度。当第一运动速度和第二运动速度都满足指定条件的时候,则禁止执行自动驻车功能。通过利用计算得到的两个运动速度综合判断车辆是否真正运动,并且两个速度分别依据不同传感器、不同信号计算得到的,避免单一传感器不稳定或者出现偏差对速度判断结果造成的不利影响。
14、可选地,确定车辆的第二运动速度之后,还包括:比较所述第一运动速度和所述第二运动速度大小,根据比较结果从所述第一运动速度和所述第二运动速度中确定大运动速度;若所述大运动速度满足所述指定条件,则判断不执行自动驻车。在计算得到两个运动速度之后,可以从中选择一个较大的大运动速度,进而判断较大运动速度是否满足指定条件,若满足,则认为不能执行自动驻车。通过综合判断车辆是否运动,当判断运动后则禁止启动自动驻车。
15、可选地,接收所述轮速传感器发送的第一信号之后,还包括:若没有接收到所述第二信号,并且没有接收到所述第三信号,则执行自动驻车功能。
16、在实际应用中,若在接收到第一信号之后的一段时间内,没有接收到第二信号,也没有接收到第三信号,则认为车辆没有运动,则在解除自动驻车之后,再次迅速启动自动驻车。利用多个信号综合判断,提高判断准确率。
17、可选地,激活所述自动驻车功能之后,还包括:
18、在激活所述自动驻车功能的情况下,若接收到用户发出的自动驻车功能关闭指示时,启动电子驻车功能;
19、或者,当所述自动驻车功能开启时间超过时间阈值时,启动电子驻车功能,退出自动驻车功能;
20、或者,当主驾车门开启,并且主驾安全带解开时,启动电子驻车功能,退出自动驻车功能。
21、在实际应用中,若车辆有长期静止的需求,或者用户想要关闭自动驻车功能,则先启动电子驻车,而后再退出自动驻车功能,从而能有效防止关闭自动驻车功能后车辆出现不可控移动的问题。
22、可选地,所述若监测到加速踏板被触发,则退出自动驻车功能,包括:
23、在车辆驻车在平地路面时,若监测到加速踏板被触发,则退出所述自动驻车功能;
24、在车辆驻车在斜坡路面时,若监测到加速踏板被触发,并且车辆驱动力大于防溜坡驱动力时,退出所述自动驻车功能。
25、在实际应用中,车辆自动驻车功能激活时,车辆驻车在不同路面的情况下,退出自动驻车功能的条件不同。具体来说,当车辆驻车在斜坡路面的时候,为了防止车辆溜坡,在退出自动驻车功能的时候,需要确保车辆当前提供的驱动力大于防溜坡所需的驱动力。从而能够使得在退出自动驻车功能的时候车辆不会发生不可控移动。
26、第二方面,本技术实施例提供一种车辆,包括:车身和电源;
27、所述车身上安装有存储器、处理器;
28、所述存储器,用于存储一条或多条计算机指令;
29、所述处理器用于执行所述一条或多条计算机指令以用于执行第一方面方法中的步骤。
30、第三方面,本技术实施例提供一种计算机可读存储介质,计算机可读存储介质被执行时能够实现第一方面方法中的步骤。
31、本技术实施例提供的车辆控制方法、车辆及介质中,接收轮速传感器发送的第一信号;若在第一时间窗口内还接收到辅助传感器发送的第二信号,则根据所述第一信号和所述第二信号确定车辆的第一运动速度,所述第一时间窗口的起始时刻为第一时刻,所述第一时刻为接收到所述第一信号的时刻;若所确定的第一运动速度满足指定条件,则判断不执行自动驻车功能。通过上述方案,在用户踩下加速踏板(也就是加速踏板被触发)的情况下,会退出自动驻车功能,此时依靠车辆驱动力可以驱动车辆前进或者倒退运动。但是在有的情况下踩下(比如坡起情况下)用户踩下加速踏板后,车辆实际运动缓慢,无法及时检测到车辆运动速度,因此,综合利用第一信号、第二信号计算得到车辆的第一运动速度,这两个信号分别来自于不同传感器,避免单一传感器不稳定或者错误导致检测不准确,并且,利用辅助传感器第二信号相应速度更快。利用上述方案能够有效提升自动驻车功能解除时车辆运动稳定效果,避免误激活自动驻车功能情况出现。
- 还没有人留言评论。精彩留言会获得点赞!