一种电动汽车行驶时的平坦路面快速识别方法
本发明属于电动汽车行车制动力分配控制,具体涉及一种电动汽车行驶时的平坦路面快速识别方法。
背景技术:
1、电动汽车行驶在平坦与坡道路面上时,其前后桥的载荷分配存在较为明显的差异,如果在车辆制动时对于不同坡度的道路不加以区别对待,则必然会影响制动力分配系统的控制效能,从而影响车辆行驶时的安全性和经济性。为保证电动汽车的制动效果,执行快速精确的平坦路面识别是解决问题的关键。近期的部分现有技术针对道路坡度估计大多采用了由车载gnss定位模块、加速度计、陀螺仪等传感器测量车身姿态,或者基于卡尔曼滤波算法对整车质量和道路坡度进行计算的方式,例如中国专利申请cn202211448013.6、cn202111417841.9、cn202111526176.7、cn201810548335.5等。但这些现有技术仍存在、整车质量与道路坡度估计不准确或者算法实时性不能满足要求的问题,因此仅利用误差较大的坡度估计值来判断汽车当前行驶道路是否平坦的方法不可靠。此外,现有技术中所使用的各类传感器也常需要额外加装,增加了不小的设备成本。因此,如何在整车质量未知的前提下提供一种更为精确、实时性强且低成本的平坦路面识别方法,是本领域中迫切需要解决的技术问题。
技术实现思路
1、有鉴于此,针对本领域中存在的技术问题,本发明提供了一种电动汽车行驶时的平坦路面快速识别方法,具体包括以下步骤:
2、步骤一、针对电动汽车建立车辆纵向动力学模型,并在预定工况下采集车辆运行中包括驱动电机的输出转矩tm、制动主缸压力p、左右非驱动轮的轮速ωrl和ωrr在内的运行参数;
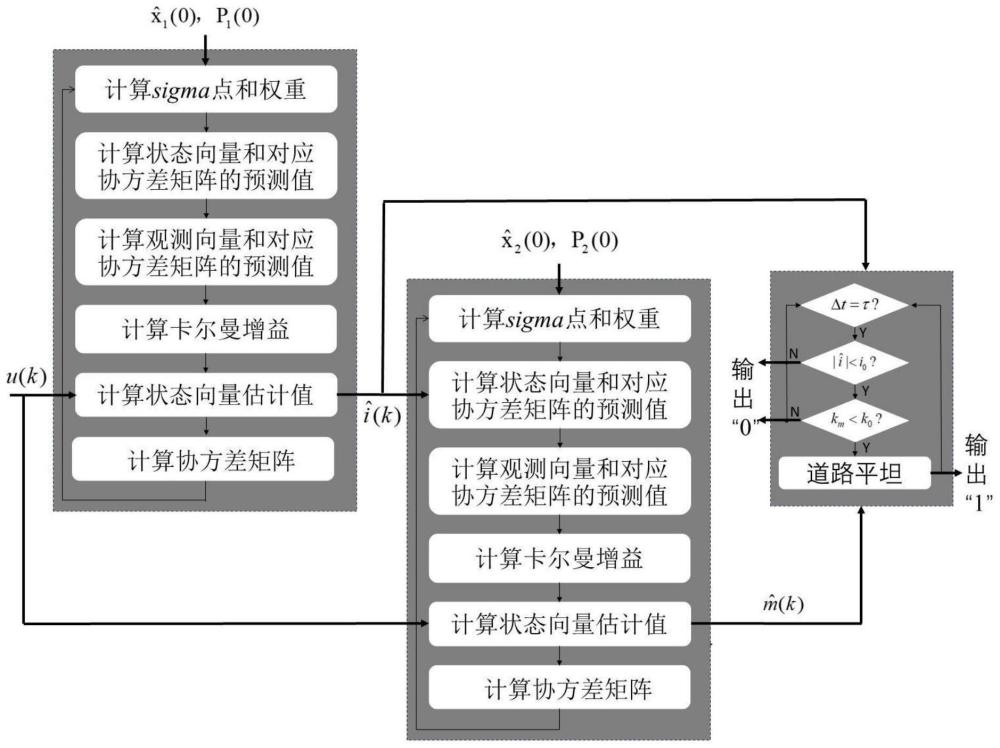
3、步骤二、以纵向车速u、整车质量m和道路坡度i作为状态向量,纵向车速u同时作为观测向量,分别建立系统的状态方程与观测方程;基于所建立的车辆纵向动力学模型以及所采集的运行参数,执行无迹卡尔曼滤波算法得到各时刻的道路坡度估计值
4、步骤三、以纵向车速u和整车质量m作为状态向量,纵向车速u同时作为观测向量,分别建立系统的状态方程与观测方程;基于所建立的车辆纵向动力学模型、所采集的运行参数以及步骤二中的坡度估计值执行无迹卡尔曼滤波算法得到各时刻的整车质量估计值并计算整车质量估计结果随时间的变化率km;
5、步骤四、将步骤二和步骤三的结果分别与设定的道路坡度估计阈值i0和整车质量估计值变化率阈值k0进行比较,识别出车辆当前所在的道路是否为平坦路面。
6、进一步地,步骤一中所述的车辆纵向动力学模型具体基于包括:传动系总传动比ig、传动系总机械效率η、车轮滚动半径r、液压制动力比例系数kp、空气阻力系数cd、迎风面积a、轮胎滚动阻力系数f及旋转质量换算系数δ在内的车辆参数建立;参考纵向车速u具体利用采集的左右非驱动轮的轮速计算得到:
7、
8、运行参数采集与测试的工况选择在大气温度为5℃~32℃,大气压力为91kpa~104kpa,相对湿度小于95%,高于路面0.7m处的平均风速小于3m/s的非雨、雪天气条件下进行;测试车辆在平直道路上由静止起步,路面坚硬、平整、干净并保证附着系数满足要求。
9、进一步地,步骤二中具体定义状态向量为x1(t)=[u(t),m(t),i(t)]t,观测向量为z1(t)=u(t),其中t为连续时间变量;所建立的状态方程具体采用以下形式:
10、
11、式中,
12、
13、所建立的观测方程具体采用以下形式:
14、
15、其中,q1(k-1)为k-1时刻系统的过程噪声;r1(k)为k时刻系统的观测噪声;δt为计算步长,ρ为空气密度,g为重力加速度;
16、执行无迹卡尔曼滤波算法得到各时刻的道路坡度估计值的具体流程包括:
17、i.计算各sigma点χ1,1、χ1,i+1、χ1,i+4,以及相应的权重w1,1、w1,i+1、w1,i+4:
18、
19、
20、
21、
22、
23、
24、其中,κ为任意常数;表示矩阵方根的第i列;
25、ii.计算状态向量和对应协方差矩阵的预测值:
26、
27、
28、其中,q1为过程噪声协方差矩阵;
29、iii.计算观测向量和对应协方差矩阵的预测值:
30、
31、
32、其中,r1为观测噪声协方差矩阵
33、iv.计算卡尔曼增益:
34、
35、
36、v.计算状态向量估计值:
37、
38、vi.计算协方差矩阵:
39、
40、进一步地,步骤三中具体定义状态向量为x2(t)=[u(t),m(t)]t,观测向量为z2(t)=u(t),其中t为连续时间变量;所建立的状态方程具体采用以下形式:
41、
42、式中,
43、
44、所建立的观测方程具体采用以下形式:
45、
46、其中,q2(k-1)为k-1时刻系统的过程噪声;r2(k)为k时刻系统的观测噪声;δt为计算步长,ρ为空气密度,g为重力加速度;
47、执行无迹卡尔曼滤波算法得到各时刻的整车质量估计值的具体流程包括:
48、i.计算各sigma点χ2,1、χ2,i+1、χ2,i+3,以及相应的权重w2,1、w2,i+1、w2,i+3:
49、
50、
51、
52、
53、
54、
55、其中,κ为任意常数;表示矩阵方根的第i列;
56、ii.计算状态向量和对应协方差矩阵的预测值:
57、
58、
59、其中,q2为过程噪声协方差矩阵;
60、iii.计算观测向量和对应协方差矩阵的预测值:
61、
62、
63、其中,r2为观测噪声协方差矩阵
64、iv.计算卡尔曼增益:
65、
66、
67、v.计算状态向量估计值:
68、
69、vi.计算协方差矩阵:
70、
71、进一步地,整车质量估计结果随时间的变化率km具体基于以下公式计算:
72、
73、进一步地,步骤四中识别道路是否为平坦路面的具体过程包括:
74、(1)设定道路坡度估计值的阈值i0以及整车质量估计值时间变化率的阈值k0;
75、(2)每间隔一定时间τ(τ=nδt)采集一次道路坡度估计值和整车质量估计值随时间的变化率km,并依次与相应的阈值比较;
76、(3)若满足则执行步骤(4),否则返回执行步骤(2)并输出信号“0”;
77、(4)若满足km<k0,则判定当前道路为平坦路面并输出信号“1”,否则返回执行步骤(2)并输出信号“0”。
78、上述本发明所提供的电动汽车行驶时的平坦路面快速识别方法,仅利用由车辆底盘can网络可采集的驱动电机输出转矩、制动主缸压力和非驱动轮的轮速三类信号,即可快速而又准确的识别平坦路面,相比现有技术摆脱了对gnss定位模块、加速度计、陀螺仪等传感器的依赖,显著降低了成本。该方法在基于双无迹卡尔曼滤波算法的道路坡度、整车质量估计中对估计初值不敏感,因而能够更可靠地估计两个参数。利用这两个参数的估计结果,本发明可根据车辆行驶在平坦或者坡道路面上的特征差异实时地识别出平坦路面,从而能够为制动力分配等汽车动力学控制系统的开发提供必要先验知识。
- 还没有人留言评论。精彩留言会获得点赞!