一种旁车道切入车辆的识别方法及系统与流程
本发明涉及自适应巡航功能,具体涉及一种旁车道切入车辆的识别方法及系统。
背景技术:
1、现有自适应巡航功能主要是通过传感器和感知融合系统给出的最近在径车辆来实现对目标的距离保持和跟停等功能,但是现有的自适应巡航功能普遍缺少对旁车道切入车辆的关注,若旁车道车辆切入本车道后再选为最近在径车辆,就会导致自车控制不及时,进而引发制动晚和强制动等情况,车辆舒适性较差和安全性较差。
技术实现思路
1、有鉴于此,本发明实施例提供一种旁车道切入车辆的识别方法及系统,以解决自适应巡航功能普遍缺少对旁车道切入车辆的关注而导致的车辆舒适性较差和安全性较差等问题。
2、为实现上述目的,本发明实施例提供如下技术方案:
3、本发明实施例第一方面公开一种旁车道切入车辆的识别方法,所述方法包括:
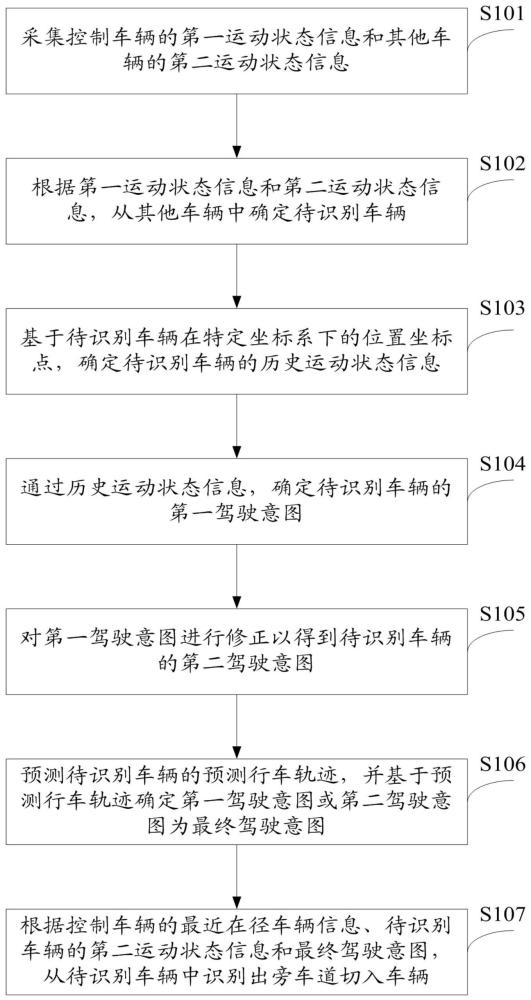
4、采集控制车辆的第一运动状态信息和其他车辆的第二运动状态信息,所述第一运动状态信息至少包含速度和偏航角速度,所述第二运动状态信息至少包含相对横向位置、相对纵向位置、航向角和道线信息;
5、根据所述第一运动状态信息和所述第二运动状态信息,从所述其他车辆中确定待识别车辆;
6、基于所述待识别车辆在特定坐标系下的位置坐标点,确定所述待识别车辆的历史运动状态信息,所述特定坐标系为以所述控制车辆为原点的坐标系;
7、通过所述历史运动状态信息,确定所述待识别车辆的第一驾驶意图,所述第一驾驶意图为向左变道、向右变道或保持车道;
8、对所述第一驾驶意图进行修正以得到所述待识别车辆的第二驾驶意图,所述第二驾驶意图为向左变道、向右变道或保持车道;
9、预测所述待识别车辆的预测行车轨迹,并基于所述预测行车轨迹确定所述第一驾驶意图或所述第二驾驶意图为最终驾驶意图;
10、根据所述控制车辆的最近在径车辆信息、所述待识别车辆的所述第二运动状态信息和所述最终驾驶意图,从所述待识别车辆中识别出旁车道切入车辆。
11、优选的,所述根据所述第一运动状态信息和所述第二运动状态信息,从所述其他车辆中确定待识别车辆,包括:
12、根据所述第一运动状态信息和所述第二运动状态信息,确定所述其他车辆的绝对速度,及确定所述其他车辆与所述控制车辆的相对横向距离和相对纵向距离;
13、若所述其他车辆的绝对速度不为0,且,若所述其他车辆与所述控制车辆的相对横向距离小于横向距离阈值,且,若所述其他车辆与所述控制车辆的相对纵向距离小于纵向距离阈值,确定所述其他车辆为待识别车辆;
14、若所述其他车辆的绝对速度为0,和/或,若所述其他车辆与所述控制车辆的相对横向距离大于等于所述横向距离阈值,和/或,若所述其他车辆与所述控制车辆的相对纵向距离大于等于所述纵向距离阈值,确定所述其他车辆不是待识别车辆。
15、优选的,所述基于所述待识别车辆在特定坐标系下的位置坐标点,确定所述待识别车辆的历史运动状态信息,包括:
16、获取所述待识别车辆的历史行车轨迹,所述历史行车轨迹至少包含:所述待识别车辆在当前时刻和其他时刻下的位置坐标点和航向角;
17、计算所述控制车辆在单位采样时间内行驶的横向距离、纵向距离和航向角变化;
18、基于所述控制车辆在单位采样时间内行驶的横向距离、纵向距离和航向角变化,将所述历史行车轨迹中其他时刻的位置坐标点和航向角转换到特定坐标系下;
19、利用转换到所述特定坐标系下的所述历史行车轨迹中的其他时刻的位置坐标点和航向角,确定所述待识别车辆的历史运动状态信息,所述历史运动状态信息至少包含历史纵向位置、历史横向位置和历史航向角。
20、优选的,所述通过所述历史运动状态信息,确定所述待识别车辆的第一驾驶意图,包括:
21、获取所述待识别车辆所在车道的车道中心线方程y=c0+c1*x+c2*x2+c3*x3,c0为所述控制车辆到所述待识别车辆所在车道的车道中心线的横向距离,c1为斜率,c2为曲率,c3为曲率变化率;
22、基于所述车道中心线方程和所述历史运动状态信息,结合dθt=1:n=headinghist-atan(y't=1:n)和dyt=1:n=yhist-yt=1:n,计算识别分量,yhist和headinghist分别为所述待识别车辆的历史横向位置和历史航向角,t=1表示当前时刻,t=n表示所述历史运动状态信息的末尾时刻,所述识别分量包含:所述待识别车辆的航向角与道线角度的航向角偏差dθt=1:n,及所述待识别车辆与所述待识别车辆所在车道的车道中心线的横向距离偏差dyt=1:n;
23、对所述识别分量进行归一化处理;
24、计算归一化处理后的所述识别分量与左变道边界椭圆的两个焦点的距离之和,得到第一值;以及计算归一化处理后的所述识别分量与右变道边界椭圆的两个焦点的距离之和,得到第二值;
25、若所述第一值大于指定阈值,确定所述待识别车辆的第一驾驶意图为向左变道;
26、若所述第二值大于所述指定阈值,确定所述待识别车辆的第一驾驶意图为向右变道;
27、若所述第一值和所述第二值不大于所述指定阈值,确定所述待识别车辆的第一驾驶意图为保持车道。
28、优选的,所述对所述第一驾驶意图进行修正以得到所述待识别车辆的第二驾驶意图,包括:
29、对于所述待识别车辆与所述待识别车辆所在车道的车道中心线的横向距离偏差,将所述横向距离偏差按照时间顺序分为m段;
30、当所述第一驾驶意图为向左变道时,若m段所述横向距离偏差依序递减,则确定所述待识别车辆的第二驾驶意图为向左变道;若m段所述横向距离偏差未依序递减,则确定所述第二驾驶意图为保持车道;
31、当所述第一驾驶意图为向右变道时,若m段所述横向距离偏差依序递增,则确定所述待识别车辆的第二驾驶意图为向右变道;若m段所述横向距离偏差未依序递增,则确定所述第二驾驶意图为保持车道。
32、优选的,所述对于所述待识别车辆与所述待识别车辆所在车道的车道中心线的横向距离偏差,将所述横向距离偏差按照时间顺序分为m段,包括:
33、对于所述待识别车辆与所述待识别车辆所在车道的车道中心线的横向距离偏差dyt=1:n,通过将所述横向距离偏差按照时间顺序分为m段,每一段横向距离偏差包含n/m个点。
34、优选的,所述预测所述待识别车辆的预测行车轨迹,并基于所述预测行车轨迹确定所述第一驾驶意图或所述第二驾驶意图为最终驾驶意图,包括:
35、对所述待识别车辆的横向位置采用匀速运动模型递推,及对所述待识别车辆的纵向位置采用匀加速运动模型递推,得到所述待识别车辆的预测行车轨迹,所述预测行车轨迹包含多个未来轨迹点;
36、计算所述预测行车轨迹中最后一个未来轨迹点与所述控制车辆所在车道的道线的横向距离;
37、若所述最后一个未来轨迹点在所述控制车辆所在车道内,且若所述最后一个未来轨迹点与所述控制车辆所在车道的道线的横向距离大于距离阈值,确定所述第一驾驶意图为最终驾驶意图;
38、若所述最后一个未来轨迹点不在所述控制车辆所在车道内,或者,若所述最后一个未来轨迹点与所述控制车辆所在车道的道线的横向距离小于等于所述距离阈值,确定所述第二驾驶意图为最终驾驶意图。
39、优选的,所述根据所述控制车辆的最近在径车辆信息、所述待识别车辆的所述第二运动状态信息和所述最终驾驶意图,从所述待识别车辆中识别出旁车道切入车辆,包括:
40、当不存在最近在径车辆、所述待识别车辆处于所述控制车辆的右车道、所述待识别车辆的所述最终驾驶意图为向左变道,确定所述待识别车辆为旁车道切入车辆;
41、当不存在最近在径车辆、所述待识别车辆处于所述控制车辆的左车道、所述待识别车辆的所述最终驾驶意图为向右变道,确定所述待识别车辆为旁车道切入车辆;
42、当存在最近在径车辆,基于所述待识别车辆的相对纵向位置计算所述待识别车辆与所述控制车辆之间的纵向距离,及计算所述最近在径车辆与所述控制车辆之间的纵向距离;
43、若所述待识别车辆处于所述控制车辆的右车道、所述待识别车辆的所述最终驾驶意图为向左变道、所述待识别车辆与所述控制车辆之间的纵向距离小于所述最近在径车辆与所述控制车辆之间的纵向距离,确定所述待识别车辆为旁车道切入车辆;
44、若所述待识别车辆处于所述控制车辆的左车道、所述待识别车辆的所述最终驾驶意图为向右变道、所述待识别车辆与所述控制车辆之间的纵向距离小于所述最近在径车辆与所述控制车辆之间的纵向距离,确定所述待识别车辆为旁车道切入车辆。
45、优选的,所述从所述待识别车辆中识别出旁车道切入车辆之后,还包括:
46、将识别旁车道切入车辆的识别结果输出给自适应巡航功能。
47、本发明实施例第二方面公开一种旁车道切入车辆的识别系统,所述系统包括:
48、采集单元,用于采集控制车辆的第一运动状态信息和其他车辆的第二运动状态信息,所述第一运动状态信息至少包含速度和偏航角速度,所述第二运动状态信息至少包含相对横向位置、相对纵向位置、航向角和道线信息;
49、第一确定单元,用于根据所述第一运动状态信息和所述第二运动状态信息,从所述其他车辆中确定待识别车辆;
50、第二确定单元,用于基于所述待识别车辆在特定坐标系下的位置坐标点,确定所述待识别车辆的历史运动状态信息,所述特定坐标系为以所述控制车辆为原点的坐标系;
51、第三确定单元,用于通过所述历史运动状态信息,确定所述待识别车辆的第一驾驶意图,所述第一驾驶意图为向左变道、向右变道或保持车道;
52、修正单元,用于对所述第一驾驶意图进行修正以得到所述待识别车辆的第二驾驶意图,所述第二驾驶意图为向左变道、向右变道或保持车道;
53、预测单元,用于预测所述待识别车辆的预测行车轨迹,并基于所述预测行车轨迹确定所述第一驾驶意图或所述第二驾驶意图为最终驾驶意图;
54、识别单元,用于根据所述控制车辆的最近在径车辆信息、所述待识别车辆的所述第二运动状态信息和所述最终驾驶意图,从所述待识别车辆中识别出旁车道切入车辆。
55、基于上述本发明实施例提供的一种旁车道切入车辆的识别方法及系统,该方法包括:采集控制车辆的第一运动状态信息和其他车辆的第二运动状态信息;根据第一运动状态信息和第二运动状态信息,从其他车辆中确定待识别车辆;基于待识别车辆在特定坐标系下的位置坐标点,确定待识别车辆的历史运动状态信息;通过历史运动状态信息,确定待识别车辆的第一驾驶意图;对第一驾驶意图进行修正以得到待识别车辆的第二驾驶意图;预测待识别车辆的预测行车轨迹,并基于预测行车轨迹确定第一驾驶意图或第二驾驶意图为最终驾驶意图;根据控制车辆的最近在径车辆信息、第二运动状态信息和最终驾驶意图,从待识别车辆中识别出旁车道切入车辆。本方案通过提前对旁车道切入车辆进行识别,使自适应巡航功能可以提前针对旁车道切入车辆采取相应策略,从而提高车辆舒适性和安全性。
- 还没有人留言评论。精彩留言会获得点赞!