一种多桥分布式电驱动轮式车辆的制作方法
本发明属于电驱动车辆,尤其涉及一种多桥分布式电驱动轮式车辆。
背景技术:
1、现有的多桥分布式电驱动轮式车辆,一般具有多个驱动桥,整车可以使用较大的驱动力,尤其是具有优良的爬障碍能力。该车型的每个车轮的扭矩独立可控,车辆动力性和通过性大幅提升,例如在电机扭矩匹配足够的情况下,可以实现0.8m垂直障碍的通过,可以实现原地转向功能。车辆在进行垂直障碍通过、原地转向等工况时,对驱动系统的需求共同表现为:车轮扭矩需求大、车速需求速度低、车姿变化大、车轮载荷变化情况大。车轮在进行上述垂直障碍通过、原地转向等工况时,由于地形突变和车姿瞬间突变,车轮轮胎面附着力大幅降低,甚至会与地面脱离,从而会造成车轮载荷骤降,同时由于此时的车轮的驱动扭矩极大,车轮转速将在大扭矩下瞬间提升。
2、其中,若车轮的驱动电机在大扭矩输出下突然卸载,可能导致出现驱动电机超速故障、过流故障等故障,一旦出现故障驱动电机将失去扭矩输出能力,直至切断低压进行故障复位。若车轮转速瞬间提升,车轮滑转率会瞬间增大,地面附着系数进一步降低,从而使车轮为车辆提供力矩进一步降低,可能造成车辆产生非期望横摆力矩,造成车辆方向失控。除此之外,车轮高速旋转将会出现“烧胎”现象,产生的橡胶颗粒碎屑将进一步减小地面附着系数,使轮胎可提供驱动扭矩将进一步降低。
3、因此,车辆在进行垂直障碍通过、原地转向等低速大扭矩工况时,车轮的滑转或飞转将可能造成车辆运行过程不流畅、卡顿,无法完成任务动作,甚至出现车辆失控。
4、现有的车辆的防滑驱动系统在垂直障碍、原地转向等低速大扭矩行驶的工况下,车轮滑转干预存在扭矩下拉慢且效果差的问题。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种具有驱动防滑控制系统的多桥分布式电驱动轮式车辆,用以解决现有车辆在垂直障碍通过、原地向等大扭矩低速工况下的车轮滑转干预存在扭矩下拉慢且效果差的问题。
2、本发明实施例提供了一种多桥分布电驱动轮式车辆,具有多个驱动桥,每个所述驱动桥包括两个车轮和两个驱动电机,每个所述车轮分别由一个所述驱动电机驱动,所述车辆还包括驱动防滑控制系统,其中,所述驱动防滑控制系统包括:
3、计算模块,根据实时车轮转速和实时车速计算各车轮的实时滑转率,并计算目标滑转率与所述实时滑转率之间的差值,获取各车轮的滑转率差值;
4、pi控制模块,输出电机扭矩命令值f至所述驱动电机以对其输出的驱动扭矩进行pi控制,从而使该驱动电机对应的车轮的实时滑转率降低;
5、模糊控制模块,基于所述滑转率差值,采用模糊控制规则确定所述pi控制模块的比例系数kp和积分系数ki;以及
6、防滑触发模块,当车轮的所述滑转率差值小于滑转率差值阈值,并且所述实时车速大于车速阈值时,所述防滑触发模块使所述pi控制模块向该车轮的驱动电机输出电机扭矩命令值f,以对该车轮进行驱动防滑控制。
7、基于上述车辆的进一步改进,当所述滑转率差值大于或等于滑转率差值阈值时,或者所述实时车速小于车速阈值时,所述防滑触发模块使所述pi控制模块停止向该车轮的驱动电机输出电机扭矩命令值f,以停止对该车轮进行驱动防滑控制。
8、基于上述车辆的进一步改进,所述pi控制模块根据如下公式计算所述电机扭矩命令值f:
9、f=f0+δf;
10、δf=kpe(t)+ki∫e(t)dt
11、式中,f0为初始电机扭矩命令值,e(t)为滑转率差值,t为时间,kp为比例系数,ki为积分系数。
12、基于上述车辆的进一步改进,所述模糊控制模块包括:正扭快速模糊控制子模块,
13、在电机扭矩命令值f大于预设的正扭矩下限值fk时,所述正扭快速模糊控制子模块采用正扭快速模糊控制规则确定比例系数kp和积分系数ki,以使所述电机扭矩命令值f减小,直至电机扭矩命令值f小于或等于预设的正扭矩下限值fk,或者停止对该车轮的驱动防滑控制时。
14、基于上述车辆的进一步改进,在所述正扭快速模糊控制规则中,基于所述滑转率差值和所述滑转率差值的变化率确定比例系数kp和积分系数ki;在所述滑转率差值的变化率不变时,比例系数kp和积分系数ki随着所述滑转率差值减小而增大。
15、基于上述车辆的进一步改进,所述模糊控制模块还包括:负扭预先模糊控制子模块,
16、当电机扭矩命令值f小于或等于预设的正扭矩下限值fk时,所述负扭预先模糊控制子模块采用负扭预先模糊控制规则输出比例系数kp和积分系数ki,以使所述电机扭矩命令值f降低至为负值,并在所述滑转率差值接近目标值并未达到目标值时使所述电机扭矩命令值f调整为正值,直至电机扭矩命令值f大于所述正扭矩下限值fk,或者停止对该车轮的驱动防滑控制时。
17、基于上述车辆的进一步改进,在负扭预先模糊控制规则中,基于所述滑转率差值和所述滑转率差值的变化率确定比例系数kp和积分系数ki;
18、在所述滑转率差值的变化率不变时,当所述滑转率差值小于负的第一预设值时,比例系数kp和积分系数ki均为正值并随着所述滑转率差值增大而减小;随着所述滑转率差值从第一预设值趋近于零值时,比例系数kp和积分系数ki随着所述滑转率差值增大而由正值减小至负值;当所述滑转率差值为零值时,比例系数kp和积分系数ki为正值;当所述滑转率差值为正值时,比例系数kp和积分系数ki为正值并随着所述滑转率差值增大而减小。
19、基于上述车辆的进一步改进,所述模糊控制模块采用如下公式计算pi控制的比例系数kp和积分系数ki:
20、kp=k'p+δkp
21、ki=k'i+δki;
22、其中,k'p、k'i为pi控制的初始比例系数和初始积分系数;δkp、δki为基于该车轮的滑转率差值采用模糊控制规则确定的比例系数修正值和积分系数修正值。
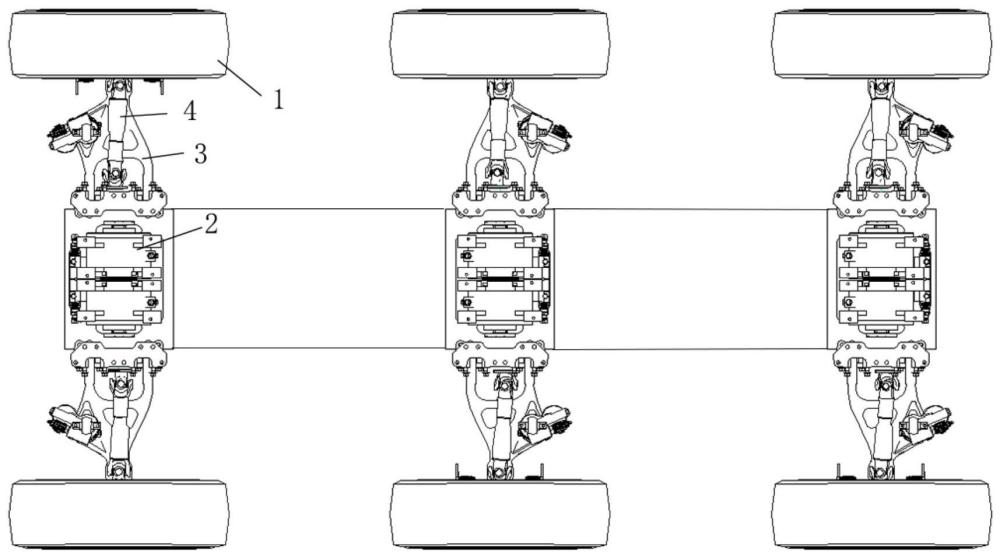
23、基于上述车辆的进一步改进,所述车轮分别通过悬架连接在车身底板上,所述驱动电机均设置车身底板上,所述驱动电机分别通过传动半轴与其对应的车轮连接以驱动所述车轮转动。
24、基于上述车辆的进一步改进,所述车辆包括2个、3个或4个所述驱动桥。
25、与现有技术相比,本发明至少可实现如下有益效果之一:
26、1、本发明中,对车辆的防滑驱动系统进行了改进,具体来说,通过滑转率差值和车速准确识别车辆在行驶工况下出现的车辆滑转情况,同时,通过模糊控制规则对pi控制的比例系数和积分系数进行调节,能够实现对车轮驱动扭矩的快速且平稳的控制,使车轮滑转率快速下降并稳定在合理范围内,从而提升了车辆在垂直障碍通过、原地向等大扭矩低速行驶工况下的行驶流畅性、稳定性和可操控性,避免因车轮滑转或飞转造成车辆运行过程不流畅、卡顿,无法完成任务动作甚至出现车辆失控的问题。
27、2、本发明的防滑驱动控制系统对该车轮进行驱动防滑控制时,采用双模糊控制规则实现调节pi控制的比例系数和积分系数。具体来说,具体来说,在电机扭矩命令值f大于正扭矩下限值fk时,通过正扭快速模糊控制规则确定比例系数和积分系数,使车速的扭矩快速下降;在电机扭矩命令值f小于或等于正扭矩下限值fk时,通过正扭快速模糊控制规则确定比例系数和积分系数,较大负扭矩值回拉修正为正扭矩值,换言之,本发明实施例中对该车轮进行驱动防滑控制时,采用双模糊控制规则实现调节pi控制的比例系数和积分系数。具体来说,在电机扭矩命令值f大于正扭矩下限值fk时,通过正扭快速模糊控制规则确定比例系数和积分系数,使车速的扭矩快速下降;在电机扭矩命令值f小于或等于正扭矩下限值fk时,通过负扭快速模糊控制规则确定比例系数和积分系数,先将扭矩继续快速下拉至较大负扭矩,并在滑转率差值接近目标且未达到目标时将较大负扭矩值回拉修正为正扭矩值。
28、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!