一种泊车路径的生成方法、装置、电子设备及存储介质与流程
本发明涉及路径规划领域,具体涉及一种泊车路径的生成方法、装置、电子设备及存储介质。
背景技术:
1、智能驾驶汽车的自动泊车系统需要一条从起点到终点的路径,这条路径需满足车辆的动力学约束,通常的做法是用reedssheep曲线连接起点和终点从而生成路径,reedssheep曲线是由j.areeds和l.a.sheep在1990年发表的论文中提出的,论文中证明了车辆从起点到终点最短路径一定是48种模式种的一种,reedssheep曲线里面有48种模式,任意的起点和终点都可以运用reedssheep曲线里面的48种模式的其中一种进行连接从而生成满足动力学约束的路径。
2、reedssheep曲线连接共有48种模式,但这些模式都以圆弧(c)开头和结尾。在实际的泊车路径中,水平车位的泊车路径大多是圆弧圆弧直线(ccs)结构,而垂直车位的路径多为直线圆弧直线(scs)结构。在泊车操作中,通常需要在有限的空间内进行,而reedssheep曲线连接所提供的所有路径都以圆弧开头和结尾,导致路径的形状不符合实际的泊车需求。
技术实现思路
1、有鉴于此,本发明实施例提供了一种泊车路径的生成方法、装置、电子设备及存储介质,以解决,reedssheep曲线连接的路径不适合实际泊车的需求的问题。
2、第一方面,本发明实施例提供了一种泊车路径的生成方法,其特征在于,所述方法包括:
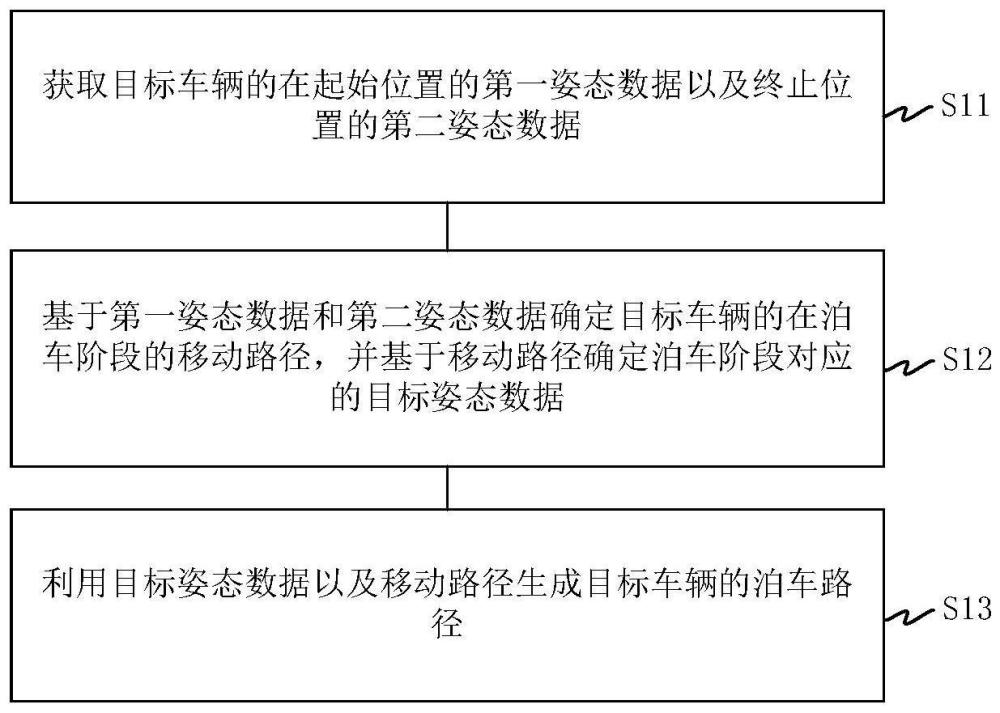
3、获取目标车辆的在起始位置的第一姿态数据以及终止位置的第二姿态数据;
4、基于所述第一姿态数据和所述第二姿态数据确定所述目标车辆的在泊车阶段的移动路径,并基于所述移动路径确定泊车阶段对应的目标姿态数据;
5、利用所述目标姿态数据以及所述移动路径生成所述目标车辆的泊车路径。
6、进一步的,所述获取目标车辆的在起始位置的第一姿态数据以及终止位置的第二姿态数据,包括:
7、确定所述目标车辆对应的起始位置坐标以及终止位置坐标;
8、基于所述起始位置坐标以及所述终止位置坐标构建平移向量;
9、利用旋转矩阵对平移向量进行旋转得到旋转向量,并确定所述旋转向量对应的方向角;
10、利用所述旋转向量确定所述第一姿态数据,以及利用所述旋转向量以及所述方向角确定所述第二姿态数据。
11、本技术实施例提供的方法可以准确地确定目标车辆的起始位置和终止位置,计算车辆的位移和移动方向,了解车辆在不同位置的姿态信息。为后续进行泊车路径规划提供了可靠的基础。
12、进一步的,所述利用所述旋转向量以及所述方向角确定所述第二姿态数据,包括:
13、获取所述目标车辆对应的车辆转弯半径;
14、对所述车辆转弯半径执行缩放操作,得到缩放后的车辆转弯半径;
15、基于所述旋转向量、车辆转弯半径以及所述方向角确定所述第二姿态数据。
16、进一步的,所述基于所述第一姿态数据和所述第二姿态数据确定所述目标车辆的在泊车阶段的移动路径,包括:
17、确定姿态数据与移动路径之间的关系公式;
18、利用所述关系公式,所述第一姿态数据以及所述第二姿态数据计算所述起始位置与终止位置之间的移动路径,其中,所述移动路径包括第一移动弧长,第二移动弧长以及直线长度,其中,所述第一移动弧长是从所述起始位置到转弯起始位置的弧长距离,所述第二移动弧长为所述转弯起始位置至转弯结束位置的弧长距离,所述直线长度为所述转弯结束位置对应的延长距离。
19、进一步的,所述基于所述移动路径确定泊车阶段对应的目标姿态数据,包括:
20、根据所述第一姿态数据以及所述第一姿态数据对应的移动路径确定第一中间姿态数据;
21、检测所述第一中间姿态数据对应的位置是否与所述终止位置一致;
22、若所述第一中间姿态数据对应的位置与终止位置不一致,则利用所述第一中间姿态数据对应的移动路径确定第二中间姿态数据;
23、若所述第二中间姿态数据对应的位置与所述终止位置一致,则将所述第一中间姿态数据以及所述第二中间姿态数据作为所述目标姿态数据。
24、本技术实施例提供的方法在自动泊车场景中,系统可以根据车辆的姿态数据和移动路径,逐步确定车辆的中间姿态和最终目标姿态,以实现准确的自动泊车操作。这有助于提高泊车的精度、可靠性和安全性,并提供更好的用户体验。
25、进一步的,所述利用所述目标姿态数据以及所述移动路径生成所述目标车辆的泊车路径,包括:
26、从所述目标姿态数据中提取中间位置;
27、通过所述移动路径连接所述中间位置与所述起始位置,以及所述中间位置与所述终止位置,得到所述泊车路径。
28、本技术实施例提供的方法可以根据目标姿态数据提取中间位置,并连接起始位置、中间位置和终止位置,得到完整的泊车路径。这有助于车辆准确、高效地完成泊车操作,提高泊车的精度和可靠性。
29、进一步的,所述方法还包括:
30、基于所述泊车路径生成控制指令;
31、发送所述控制指令至所述目标车辆的辅助驾驶系统,以使所述辅助驾驶系统基于所述泊车路径执行自动泊车操作。
32、本技术实施例提供的方法可以基于泊车路径生成控制指令,并将指令发送给车辆的辅助驾驶系统,使其执行自动泊车操作。这样可以实现高度自动化的泊车过程,提高泊车的准确性、效率和安全性,同时减轻驾驶员的操作负担。
33、第二方面,本发明实施例提供了一种泊车路径的生成装置,其特征在于,所述装置包括:
34、获取模块,用于获取目标车辆的在起始位置的第一姿态数据以及终止位置的第二姿态数据;
35、确定模块,用于基于所述第一姿态数据和所述第二姿态数据确定所述目标车辆的在泊车阶段的移动路径,并基于所述移动路径确定泊车阶段对应的目标姿态数据;
36、生成模块,用于利用所述目标姿态数据以及所述移动路径生成所述目标车辆的泊车路径。
37、第三方面,本发明实施例提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的方法。
38、第四方面,本发明实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的方法。
39、本技术实施例具有以下有益效果:
40、(1)本技术实施例提供的方法基于第一姿态数据和第二姿态数据确定目标车辆在泊车阶段的移动路径,可以根据车辆的起始状态和目标状态,推导出车辆在泊车过程中的移动轨迹。能够准确地描述车辆的运动路径。基于移动路径确定泊车阶段对应的目标姿态数据,实现了根据车辆的移动路径,推断出车辆在泊车过程中的具体姿态信息,以便后续更好地控制和监测车辆的泊车操作。最终根据目标车辆的姿态数据和移动路径,生成适合实际泊车需求的泊车路径。解决了reedssheep曲线连接路径不适合泊车需求的问题,提高了泊车路径的准确性,有利于自动泊车的安全。
41、(2)本技术实施例提供的方法在自动泊车场景中,系统可以根据车辆的姿态数据和移动路径,逐步确定车辆的中间姿态和最终目标姿态,以实现准确的自动泊车操作。这有助于提高泊车的精度、可靠性和安全性,并提供更好的用户体验。
42、(3)本技术实施例可以根据姿态数据和移动路径之间的关系公式,计算出适合实际泊车需求的移动路径,且移动路径的路径结构由第一移动弧长,第二移动弧长以及直线长度构成,提出了一种以圆弧开头直线结束的路径结构,相比现有的以圆弧开头圆弧结束的路径结构,本技术的移动路径能够更进一步的满足车辆在实际泊车需求。
43、(4)本技术实施例提供的方法可以基于泊车路径生成控制指令,并将指令发送给车辆的辅助驾驶系统,使其执行自动泊车操作。这样可以实现高度自动化的泊车过程,提高泊车的准确性、效率和安全性,同时减轻驾驶员的操作负担。
- 还没有人留言评论。精彩留言会获得点赞!