电动四轮车的驱动装置及其控制方法和存储介质与流程
本发明涉及电动车辆,具体涉及一种电动四轮车的驱动装置及其控制方法和存储介质。
背景技术:
1、电动汽车由于具有零污染、零排放的技术优势,对于解决石油能源危机与空气污染具有重要的现实意义。
2、例如,扫路机就是一种电动四轮车,有的扫路机采用纯电动电驱系统,可降低车辆对电机驱动系统的功率需求,在保证整车动力性的同时,提升整车驱动经济性。
3、在相关现有技术中,以扫路机为例,扫路机一般采用的驱动电机是单桥驱动,峰值扭矩较小,使得扫路机过坡坎时费力。
技术实现思路
1、有鉴于此,本发明提供了一种电动四轮车的驱动装置,以解决现有技术中存在的过坡坎费力的技术问题。
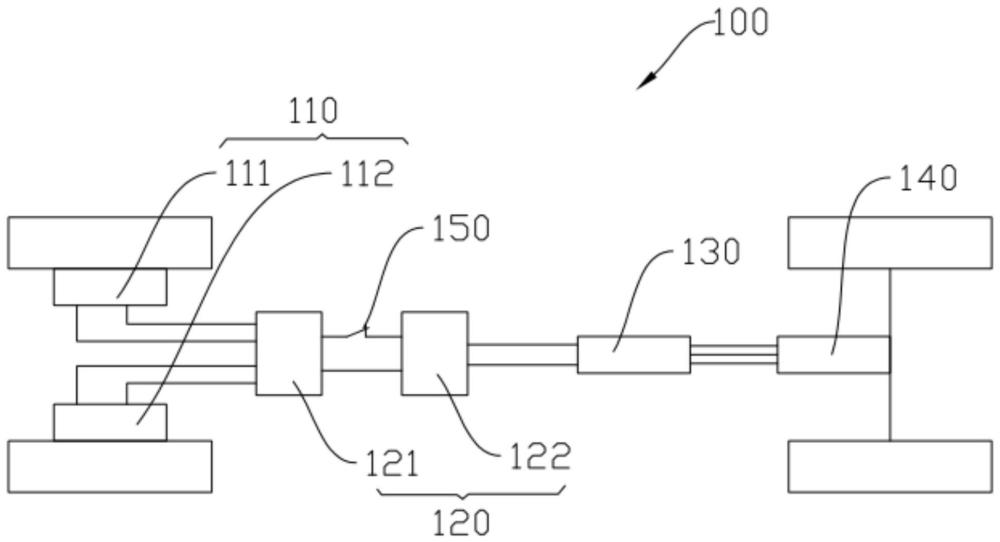
2、为了解决上述问题,本发明提供了一种电动四轮车的驱动装置,包括:前桥驱动模块;后桥驱动模块;控制模块,与所述前桥驱动模块和所述后桥驱动模块分别通信连接;动力电池,与所述前桥驱动模块和所述后桥驱动模块分别电性连接;控制面板,设有与路况对应的控制模式开关,所述控制模式开关与所述控制模块通信连接;其中,所述控制模式开关启动时,所述控制模块控制所述前桥驱动以与路况对应的第一工作模式动作,且所述控制模块控制所述后桥驱动以与路况对应的第二工作模式动作,所述第一工作模式包括随动模式、驱动模式或充电模式,所述第二工作模式为驱动模式。
3、在一种可选的实施方式中,所述动力电池包括:第一电池组,与所述前桥驱动模块电性连接;第二电池组,与所述后桥驱动模块电性连接,且所述第二电池组与所述第一电池组并联,所述第二电池组与所述第一电池组之间通过控制电路连接,所述控制电路上设有继电开关。
4、在一种可选的实施方式中,所述控制模式开关设置为三个,其中两个所述控制模式开关分别对应的路况为平路,另一个所述控制模式开关对应的路况为坡坎。
5、为了解决上述问题,本发明提供了一种电动四轮车的驱动装置的控制方法,包括:获取路况信息;根据所述路况信息启动对应的控制模式开关,以控制前桥驱动模块与所述路况信息对应的第一工作模式动作,且控制后桥驱动模块与所述路况信息对应的第二工作模式动作;其中,所述第一工作模式包括随动模式、驱动模式或充电模式,所述第二工作模式为驱动模式。
6、在一种可选的实施方式中,所述路况信息包括平路,在平路路况下,控制动力电池为所述后桥驱动模块供电,且控制所述前桥驱动模式处于随动模式,计算出所述后桥驱动模块的第一驱动扭矩,计算公式如下:
7、
8、η:驱动电机效率,u:动力电池当前电压,i:动力电池允许放电电流,
9、n:驱动电机转速,
10、α:油门踏板开度,torquemax:驱动电机峰值转矩,
11、drivetorque1:第一驱动扭矩;
12、控制所述后桥驱动模块以所述第一驱动扭矩动作,以使得所述后桥驱动模块驱动整车。
13、在一种可选的实施方式中,控制所述后桥驱动模块驱动整车,具体还包括:当车速与最高车速之间的差值小于车速差距预设值,所述后桥驱动模块的第二驱动扭矩为当前电机反馈扭矩,计算公式如下:
14、
15、drivetorquefbk:驱动电机反馈扭矩,v:车速,vmax:最高车速,
16、drivetorque2:第二驱动扭矩。
17、在一种可选的实施方式中,控制所述后桥驱动模块驱动整车,具体还包括:在车辆制动时,对驱动电机发送第三驱动扭矩,计算公式如下:
18、
19、η:驱动电机效率,u:动力电池当前电压,
20、i1:动力电池允许放电电流,n:驱动电机转速,
21、drivetorque3:第三驱动扭矩。
22、在一种可选的实施方式中,在平路路况下,控制第一电池组和第二电池组断开连接,以使得所述前桥驱动模块向所述第一电池组充电,所述第二电池组向后桥驱动模块供电。
23、在一种可选的实施方式中,所述前桥驱动模块包括左轮轮边电机和右轮轮边电机,所述后桥驱动模块包括驱动电机,所述电动四轮车的驱动装置的控制方法还包括:获取左轮轮边电机扭矩分配系数、右轮轮边电机扭矩分配系数和驱动电机扭矩分配系数,计算如下:
24、nmin=min(n1,n2,n3);
25、nmin:电机最小转速;
26、mi=(ni-nmin)
27、当mi<=δ,则判断该电机超速打滑;
28、γi=kp×|ni-nmin|+ki×∫|ni-nmin|dt+kd×|ni-nmin|/dt
29、ni:电机转速,δ:超速阈值,γi:扭矩分配系数;
30、根据左轮轮边电机扭矩分配系数、右轮轮边电机扭矩分配系数和驱动电机扭矩分配系数获取对应的左轮轮边电机扭矩、右轮轮边电机扭矩和驱动电机扭矩,计算如下:
31、drivetorque7=drivetorque4-γ1
32、drivetorque8=drivetorque5-γ2
33、drivetorque9=drivetorque2-γ3
34、γ1:左轮轮边电机扭矩分配系数,γ2:右轮轮边电机扭矩分配系数,
35、γ3:驱动电机扭矩分配系数,drivetorque7:左轮轮边电机扭矩,
36、drivetorque8:右轮轮边电机扭矩,drivetorque9:驱动电机扭矩。
37、在一种可选的实施方式中,所述路况信息还包括坡坎,在坡坎路况下,所述控制方法包括:控制所述前桥驱动模块处于驱动状态;控制第一电池组和第二电池组断开连接,以使得所述第一电池组对所述前桥驱动模块供电,所述第二电池组对所述后桥驱动模块供电;
38、计算出所述前桥驱动模块对应的第四驱动扭矩和所述后桥驱动模块对应的第五驱动扭矩如下:
39、轮边电机驱动扭矩
40、轮边电机驱动扭矩
41、η:驱动电机效率,u:动力电池当前电压,i:动力电池允许放电电流,
42、n:驱动电机转速,
43、α:油门踏板开度,torquemax4:轮边电机峰值转矩,
44、torquemax5:驱动电机峰值转矩。
45、为了解决上述问题,本发明提供了一种存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现任一项所述的电动四轮车的驱动装置的控制方法的步骤。
46、本发明具有以下优点:
47、1、采用分布式驱动方式,通过根据路况来匹配不同的驱动模式,可以满足电动四轮车的多种行走路况。
48、2、通过根据路况和扭矩分配控制方法来控制前驱动模块、后驱动模块的驱动扭矩,使得电动四轮车能够更顺畅地过坡坎。
49、3、通过回收模式可以大幅提高整车能量回收率,车辆在驱动行走时也可以进行能量回收,更加节能,可以减小整车电量配置,降低整车成本。
50、4、相比于液压驱动,更加静音,整体驱动效率更高。
- 还没有人留言评论。精彩留言会获得点赞!