车辆碰撞风险评估方法和装置、无人车和存储介质与流程
本申请属于自动驾驶,具体涉及一种车辆碰撞风险评估方法和装置、无人车和存储介质。
背景技术:
1、碰撞风险评估是实现安全自动驾驶的关键一步,通过对车辆当前环境的感知,可以获取其周围潜在关联对象,并由此进行碰撞风险评估,从而识别车辆周围的威胁,因此,车辆碰撞风险评估方法的可靠和高效至关重要。
2、公开于该背景技术部分的信息仅仅旨在增加对本申请的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本申请的目的在于提供一种车辆碰撞风险评估方法,其用于解决当前车辆碰撞风险评估可靠性和实时性差的问题。
2、为实现上述目的,本申请提供了一种车辆碰撞风险评估方法,所述方法包括:
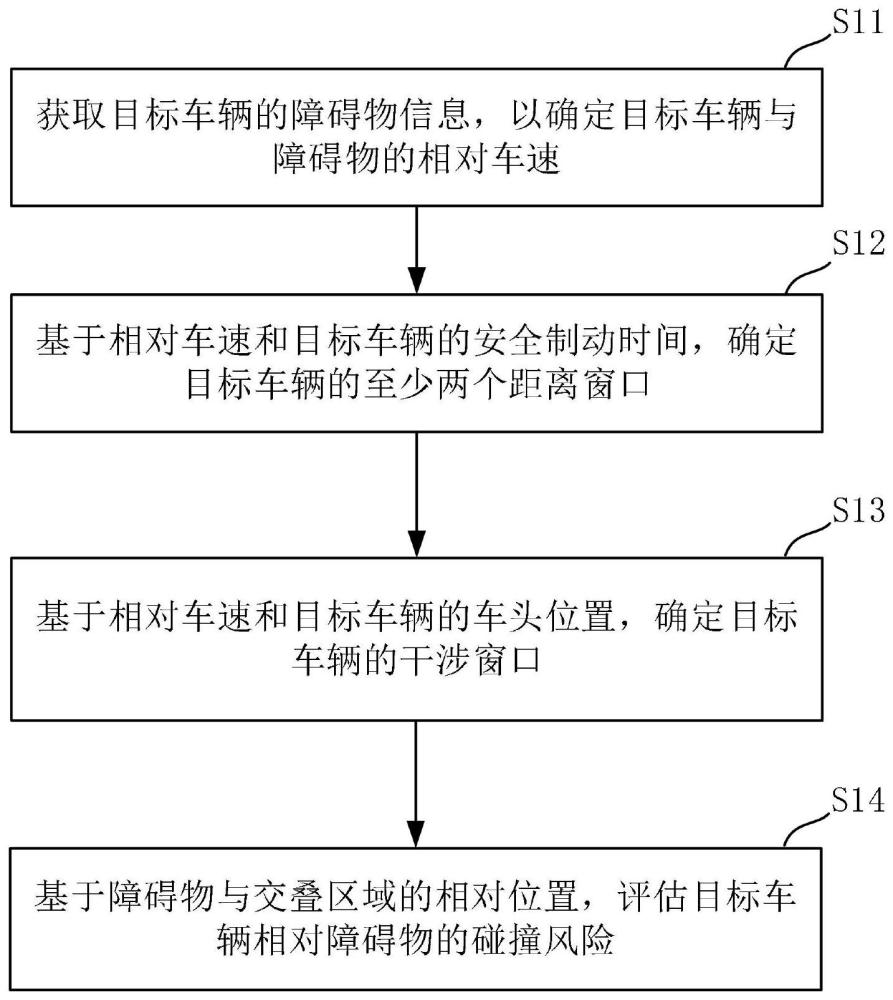
3、获取目标车辆的障碍物信息,以确定所述目标车辆与障碍物的相对车速;
4、基于所述相对车速和目标车辆的安全制动时间,确定所述目标车辆的至少两个距离窗口,其中,所述距离窗口纵向切分所述目标车辆的前方区域;
5、基于所述相对车速和目标车辆的车头位置,确定所述目标车辆的干涉窗口,其中,所述干涉窗口表示与以所述相对车速运动的目标车辆存在干涉的区域,所述干涉窗口与至少两个距离窗口分别具有交叠区域;
6、基于所述障碍物与交叠区域的相对位置,评估所述目标车辆相对障碍物的碰撞风险。
7、一实施例中,在所述障碍物的设定位置位于交叠区域中时,所述方法还包括:
8、判断所述干涉窗口与所述目标车辆所处车道边界是否具有目标干涉位置,其中,所述目标干涉位置为障碍物前方干涉窗口与目标车辆所处车道边界的最近干涉位置;若是,
9、基于所述目标干涉位置与障碍物的距离,修正所述目标车辆相对障碍物的碰撞风险。
10、一实施例中,所述方法还包括:
11、确定所述车道边界的约束类型,其中,所述约束类型包括硬约束和软约束;
12、基于所述约束类型,确定修正所述目标车辆相对障碍物碰撞风险的力度。
13、一实施例中,所述方法还包括:
14、获取所述目标车辆的预测轨迹,以确定所述障碍物和预测轨迹是否干涉,其中,所述目标车辆的预测轨迹基于目标车辆的感知设备和预设的预测模型获得;若是,
15、基于所述障碍物和预测轨迹的干涉位置相对于目标距离窗口的位置,确定修正所述目标车辆相对障碍物碰撞风险的力度,其中,所述目标距离窗口为所述障碍物的设定位置位于的距离窗口。
16、一实施例中,基于所述相对车速和目标车辆的安全制动时间,确定所述目标车辆的至少两个距离窗口,具体包括:
17、基于所述目标车辆的安全制动时间和预设时间参数,确定所述目标车辆的至少两个风险动态距离;
18、以所述至少两个风险动态距离纵向切分所述目标车辆的前方区域,确定所述目标车辆的至少三个距离窗口,其中,所述至少三个距离窗口的风险等级在远离所述目标车辆的方向上逐级降低。
19、一实施例中,基于所述相对车速和目标车辆的车头位置,确定所述目标车辆的干涉窗口,具体包括:
20、基于所述相对车速分解的相对横向车速和相对纵向车速之比,确定所述目标车辆的行驶方向系数;
21、基于所述目标车辆的车头位置和目标构造函数,确定所述目标车辆的两条行驶方向线,其中,所述两条行驶方向线之间区域限定所述干涉窗口,所述目标构造函数是以行驶方向系数为斜率的直线函数。
22、一实施例中,基于所述障碍物与交叠区域的相对位置,评估所述目标车辆相对障碍物的碰撞风险,具体包括:
23、在所述障碍物位于距离目标车辆最远的距离窗口时,确定所述目标车辆相对障碍物无碰撞风险;和/或,
24、在所述障碍物位于所述干涉窗口之外的区域时,确定所述目标车辆相对障碍物无碰撞风险。
25、一实施例中,所述目标车辆包括至少两个障碍物,所述方法具体包括:
26、评估所述目标车辆相对至少两个障碍物的碰撞风险;
27、选取所述目标车辆相对至少两个障碍物的最高碰撞风险,确定为所述目标车辆的当前碰撞风险。
28、本申请还提供一种车辆碰撞风险评估装置,包括:
29、获取模块,用于获取目标车辆的障碍物信息,以确定所述目标车辆与障碍物的相对车速;
30、第一确定模块,用于基于所述相对车速和目标车辆的安全制动时间,确定所述目标车辆的至少两个距离窗口,其中,所述距离窗口纵向切分所述目标车辆的前方区域;
31、第二确定模块,用于基于所述相对车速和目标车辆的车头位置,确定所述目标车辆的干涉窗口,其中,所述干涉窗口表示与以所述相对车速运动的目标车辆存在干涉的区域,所述干涉窗口与至少两个距离窗口分别具有交叠区域;
32、评估模块,用于基于所述障碍物与交叠区域的相对位置,评估所述目标车辆相对障碍物的碰撞风险。
33、本申请还提供一种无人车,包括:
34、至少一个处理器;以及
35、存储器,所述存储器存储指令,当所述指令被所述至少一个处理器执行时,使得所述至少一个处理器执行如上所述的车辆碰撞风险评估方法。
36、本申请还提供一种机器可读存储介质,其存储有可执行指令,所述指令当被执行时使得所述机器执行如上所述的车辆碰撞风险评估方法。
37、与现有技术相比,根据本申请的车辆碰撞风险评估方法,通过确定目标车辆与障碍物的相对车速,再分别结合安全制动时间和车头位置确定目标车辆的距离窗口和干涉窗口,这其中,距离窗口纵向切分目标车辆前方区域、干涉窗口则表示与以相对车速运动的目标车辆存在干涉的区域,这样,通过比较干涉窗口和距离窗口的交叠区域和障碍物的相对位置,可以快速实时地评估目标车辆相对该障碍物的碰撞风险,且可靠性较高。
38、在另一个方面,通过判断干涉窗口与目标车辆所处车道边界是否具有目标干涉位置,若是,则基于目标干涉位置与障碍物的距离,修正目标车辆相对障碍物的碰撞风险。这其中,考虑了干涉位置与障碍物的距离对目标车辆与障碍物发生碰撞可能的影响,进一步提升评估方法的可靠性。
39、在另一个方面,通过获取目标车辆的预测轨迹,以确定障碍物和预测轨迹是否干涉,若是,基于障碍物和预测轨迹的干涉位置相对于目标距离窗口的位置,确定修正目标车辆相对障碍物碰撞风险的力度。这其中,考虑了预测轨迹的指引,障碍物和预测轨迹的干涉位置越接近目标距离窗口,目标车辆在目标距离窗口内发生碰撞的可能性越高,进而以此修正碰撞风险等级,进一步提升评估方法的可靠性。
40、在另一个方面,可以同时评估目标车辆相对多个障碍物的碰撞风险,并选取其中的最高碰撞风险为目标车辆车辆的当前碰撞风险,目标车辆进而可以以该风险等级进行进一步的决策,提升了自动驾驶过程中决策的有效性。
技术特征:
1.一种车辆碰撞风险评估方法,其特征在于,所述方法包括:
2.根据权利要求1所述的车辆碰撞风险评估方法,其特征在于,在所述障碍物的设定位置位于交叠区域中时,所述方法还包括:
3.根据权利要求2所述的车辆碰撞风险评估方法,其特征在于,所述方法还包括:
4.根据权利要求2所述的车辆碰撞风险评估方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的车辆碰撞风险评估方法,其特征在于,基于所述相对车速和目标车辆的安全制动时间,确定所述目标车辆的至少两个距离窗口,具体包括:
6.根据权利要求1所述的车辆碰撞风险评估方法,其特征在于,基于所述相对车速和目标车辆的车头位置,确定所述目标车辆的干涉窗口,具体包括:
7.根据权利要求1所述的车辆碰撞风险评估方法,其特征在于,基于所述障碍物与交叠区域的相对位置,评估所述目标车辆相对障碍物的碰撞风险,具体包括:
8.根据权利要求1所述的车辆碰撞风险评估方法,其特征在于,所述目标车辆包括至少两个障碍物,所述方法具体包括:
9.一种车辆碰撞风险评估装置,其特征在于,包括:
10.一种无人车,包括:
11.一种机器可读存储介质,其存储有可执行指令,所述指令当被执行时使得所述机器执行如权利要求1至8任一项所述的车辆碰撞风险评估方法。
技术总结
本申请公开了一种车辆碰撞风险评估方法和装置、无人车和存储介质,其中该方法包括获取目标车辆的障碍物信息,以确定目标车辆与障碍物的相对车速;基于相对车速和目标车辆的安全制动时间,确定目标车辆的至少两个距离窗口,其中,距离窗口纵向切分目标车辆的前方区域;基于相对车速和目标车辆的车头位置,确定目标车辆的干涉窗口,其中,干涉窗口表示与以相对车速运动的目标车辆存在干涉的区域,干涉窗口与至少两个距离窗口分别具有交叠区域;基于障碍物与交叠区域的相对位置,评估目标车辆相对障碍物的碰撞风险。这样,可以对目标车辆当前所处环境的碰撞风险进行实时评估,且可靠性高。
技术研发人员:付一豪,姚志鹏,吕强,苗乾坤
受保护的技术使用者:新石器慧通(北京)科技有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!