一种六足机器人
本发明涉及机器人。
背景技术:
1、传统的移动机器人结构有轮式的、履带式的以及足式的。轮式机器人的轮式结构决定了它在平坦的地面运行比较快且比较稳定,但其缺点是在崎岖的路面运动效率非常低下。履带式机器人是对轮式机器人的进一步升级,可以在崎岖地面上缓慢运动,但是由于履带式机器人的机动性比较差,因此在崎岖地面车身容易晃动,依然无法解决稳定性的问题。
2、足式的机器人是仿造昆虫结构进行改良而成。例如公开号为cn 116101399b,公开日为2023年6月20日,专利名称为《一种智能六足机器人》的公开文献,公开了一种智能六足机器人,包括六足机器人,六足机器人有机器人壳体和设置在机器人壳体外侧的六条机械腿组成,所述机器人壳体顶部一侧设有可收纳全方位摄像头,且机器人壳体顶部一侧开设有收纳槽,所述机器人壳体内部开设有腔体,涉及六足机器人技术领域。
3、这类机器人不仅可以在崎岖地面进行灵活运动,还可以像昆虫一样在很多复杂环境进行工作,比如爬楼梯等等。在对机器人结构设计的前期,我们做了大量的分析,最终决定采取类似蚂蚁结构的六足机器人。
4、但目前的六足机器人结构稳定性和移动性能上存在不足,需要研发一种既能满足特殊路况形状需求,也能满足铺装路面高速移动的机器人结构。
技术实现思路
1、本发明所要解决的技术问题是实现一种适应性、机动性均衡的机器人结构。
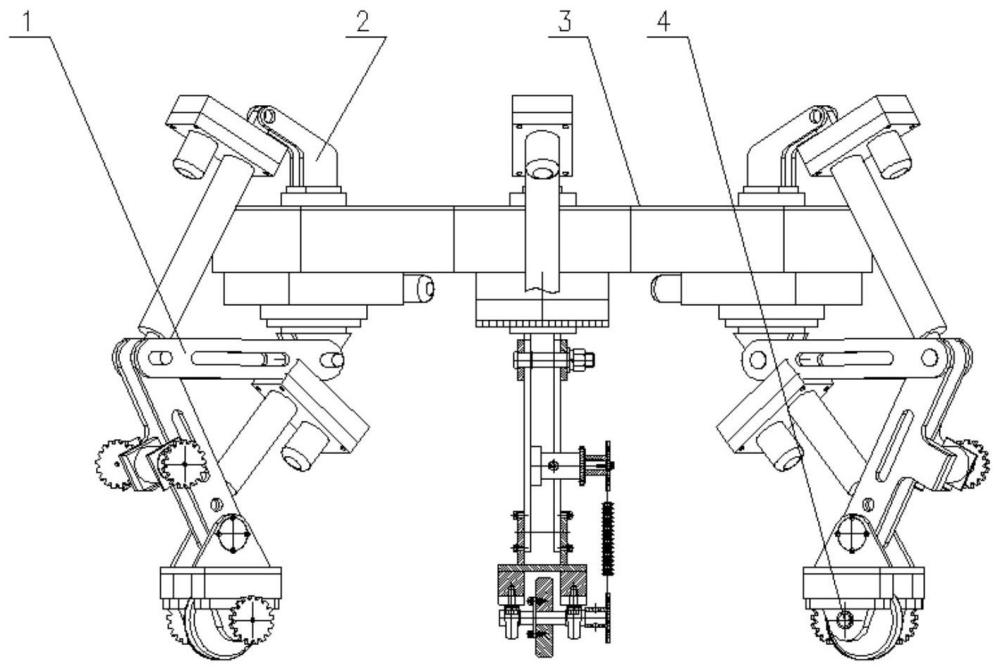
2、为了实现上述目的,本发明采用的技术方案为:一种六足机器人,机器人设有主体钢结构,所述主体钢结构的周边固定有六个支撑足,每个所述支撑足结构相同,所述支撑足顶部设有用于固定在主体钢结构上的支撑板,所述支撑板底面设有向下延伸的上支撑腿,所述上支撑腿下端通过上转轴与中间腿上端连接,所述中间腿下端通过下转轴与下支撑腿上端连接,所述下支撑腿的下端设有底座,所述底座上设有驱动轮。
3、所述上转轴向外延伸凸出有上驱动齿,所述上转轴向外延伸凸出有下驱动齿,所述中间腿上固定有两个独立的驱动电机,所述驱动电机驱动动力齿轮转动,两个动力齿轮分别通过皮带连接上驱动齿和下驱动齿,两个所述驱动电机通过驱动上转轴和下转轴转动使上支撑腿和下支撑腿相对中间腿摆动。
4、所述驱动轮向外延伸凸出有从动齿轮,所述下支撑腿上设有行动电机,所述行动电机的输出轴上固定有主动齿轮转动,所述主动齿轮通过皮带连接从动齿轮。
5、所述主体钢结构边缘设有支撑腿升降装置,每个所述支撑足固定在独立的支撑腿升降装置上。
6、所述上支撑腿和支撑板之间设有转轴,所述中间腿与伸缩杆一端固接,所述伸缩杆另一端连接主体钢结构上的支撑腿摆动装置。
7、所述主体钢结构整体呈六边形的扁平结构,所述支撑腿升降装置分别固定在主体钢结构六个边的中间位置。
8、所述转轴、上转轴和下转轴上均设有角度传感器,所述角度传感器连接并输出感应信号至控制器。
9、所述支撑腿升降装置上设有升降位置传感器,所述升降位置传感器连接并输出感应信号至控制器。
10、所述主体钢结构上固定有电池、控制器、运载舱和感知导航器件。
11、本发明采用导电滑环的设计,防止因为通过崎岖地面造成的履带方向偏转以及履带小车不能自由转动的问题,实现机器人360。无死角转动,适应各种复杂的地形,采用挂胶履带的设计,更换不同种类的履带模块以应对履带的损伤与不同的地形;采用改进的步履式动力设计,通过调整大小臂的电动推杆可以实现机器人的角度调整,补偿地形凸凹高度差,进而能够在倾斜地形正常行驶。
技术特征:
1.一种六足机器人,机器人设有主体钢结构,所述主体钢结构的周边固定有六个支撑足,每个所述支撑足结构相同,其特征在于:所述支撑足顶部设有用于固定在主体钢结构上的支撑板,所述支撑板底面设有向下延伸的上支撑腿,所述上支撑腿下端通过上转轴与中间腿上端连接,所述中间腿下端通过下转轴与下支撑腿上端连接,所述下支撑腿的下端设有底座,所述底座上设有驱动轮。
2.根据权利要求1所述的六足机器人,其特征在于:所述上转轴向外延伸凸出有上驱动齿,所述上转轴向外延伸凸出有下驱动齿,所述中间腿上固定有两个独立的驱动电机,所述驱动电机驱动动力齿轮转动,两个动力齿轮分别通过皮带连接上驱动齿和下驱动齿,两个所述驱动电机通过驱动上转轴和下转轴转动使上支撑腿和下支撑腿相对中间腿摆动。
3.根据权利要求2所述的六足机器人,其特征在于:所述驱动轮向外延伸凸出有从动齿轮,所述下支撑腿上设有行动电机,所述行动电机的输出轴上固定有主动齿轮转动,所述主动齿轮通过皮带连接从动齿轮。
4.根据权利要求1、2或3所述的六足机器人,其特征在于:所述主体钢结构边缘设有支撑腿升降装置,每个所述支撑足固定在独立的支撑腿升降装置上。
5.根据权利要求4所述的六足机器人,其特征在于:所述上支撑腿和支撑板之间设有转轴,所述中间腿与伸缩杆一端固接,所述伸缩杆另一端连接主体钢结构上的支撑腿摆动装置。
6.根据权利要求5所述的六足机器人,其特征在于:所述主体钢结构整体呈六边形的扁平结构,所述支撑腿升降装置分别固定在主体钢结构六个边的中间位置。
7.根据权利要求6所述的六足机器人,其特征在于:所述转轴、上转轴和下转轴上均设有角度传感器,所述角度传感器连接并输出感应信号至控制器。
8.根据权利要求7所述的六足机器人,其特征在于:所述支撑腿升降装置上设有升降位置传感器,所述升降位置传感器连接并输出感应信号至控制器。
9.根据权利要求8所述的六足机器人,其特征在于:所述主体钢结构上固定有电池、控制器、运载舱和感知导航器件。
技术总结
本发明揭示了一种六足机器人,机器人设有主体钢结构,所述主体钢结构的周边固定有六个支撑足,每个所述支撑足结构相同,所述支撑足顶部设有用于固定在主体钢结构上的支撑板,所述支撑板底面设有向下延伸的上支撑腿,所述上支撑腿下端通过上转轴与中间腿上端连接,所述中间腿下端通过下转轴与下支撑腿上端连接,所述下支撑腿的下端设有底座,所述底座上设有驱动轮。采用改进的步履式动力设计,通过调整大小臂的电动推杆可以实现机器人的角度调整,补偿地形凸凹高度差,进而能够在倾斜地形正常行驶。
技术研发人员:陈宇,夏吴雨,曹良磊
受保护的技术使用者:安徽信息工程学院
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!