电动自行车的辅助电子制动方法和系统与流程
本发明涉及电动自行车的控制,尤其是涉及电动自行车的辅助电子制动方法和系统。
背景技术:
1、汽车的abs系统是车辆进行制动时,若前后轮的转速差过大发生打滑时对抱死轮进行点刹制动。与之相比,电动自行车的后轮是轮毂电机,可以作为电机进行动力输出,也可以作为发电机进行能量回收,产生制动效果。
2、传统电动自行车的前轮制动力为机械制动力,后轮制动力为机械制动力和电机电气制动力;当进行制动时,容易发生制动力不均衡,从而导致打滑。
技术实现思路
1、有鉴于此,本发明的目的在于提供电动自行车的辅助电子制动方法和系统,当制动力分配不均时,通过调节电机的动力输出控制刹车时的两个轮子的转速差,实现刹车时的车辆稳定,防止打滑。
2、第一方面,本发明实施例提供了电动自行车的辅助电子制动方法,所述方法包括:
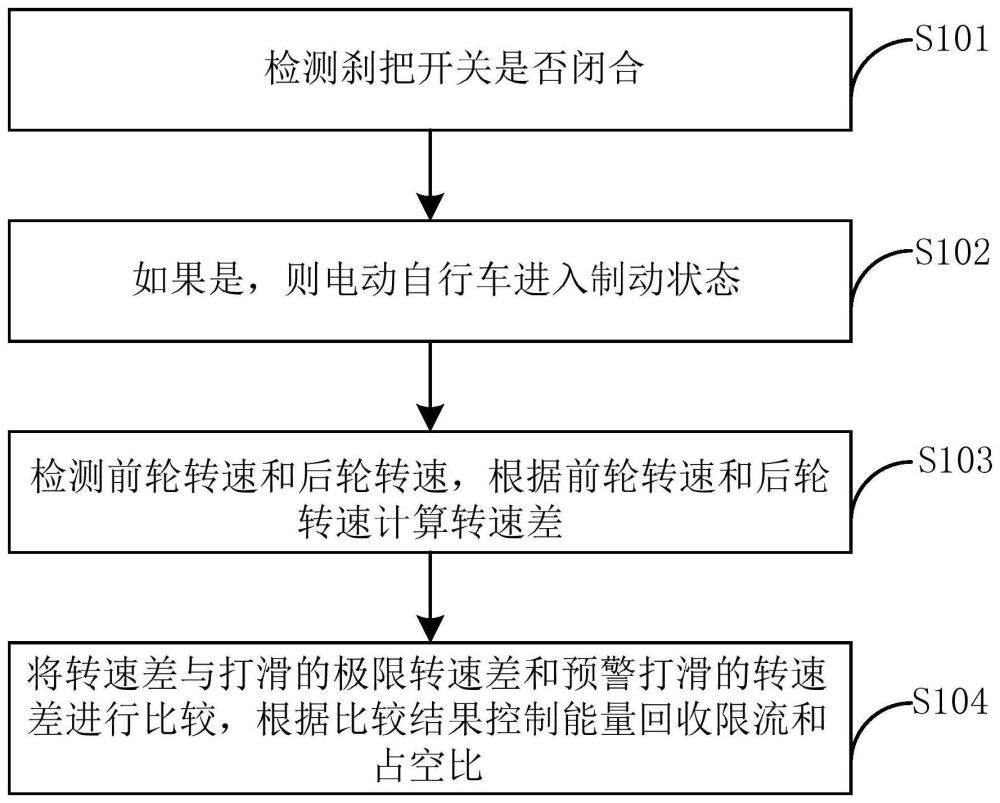
3、检测刹把开关是否闭合;
4、如果是,则所述电动自行车进入制动状态;
5、检测前轮转速和后轮转速,根据所述前轮转速和所述后轮转速计算转速差;
6、将所述转速差与打滑的极限转速差和预警打滑的转速差进行比较,根据比较结果控制能量回收限流和占空比。
7、进一步的,将所述转速差与打滑的极限转速差和预警打滑的转速差进行比较,根据比较结果控制能量回收限流和占空比,包括:
8、在所述前轮转速小于所述后轮转速的情况下,如果所述转速差大于0且小于或等于所述预警打滑的转速差,则控制器的所述能量回收限流随所述转速差增大;
9、如果所述转速差大于所述预警打滑的转速差且小于或等于所述打滑的极限转速差,则所述控制器的所述能量回收限流达到最大限流,且三相短路的所述占空比随所述转速差增大;
10、如果所述转速差大于所述打滑的极限转速差,则所述控制器的所述三相短路的占空比达到最大。
11、进一步的,将所述转速差与打滑的极限转速差和预警打滑的转速差进行比较,根据比较结果控制能量回收限流和占空比,包括:
12、在所述前轮转速大于所述后轮转速的情况下,如果所述转速差大于0且小于或等于所述预警打滑的转速差,则控制器的所述能量回收限流随所述转速差减小;
13、如果所述转速差大于所述预警打滑的转速差且小于或等于所述打滑的极限转速差,则所述控制器的正向驱动的占空比随所述转速差增大;
14、如果所述转速差大于所述打滑的极限转速差,则所述控制器的正向驱动的占空比达到最大。
15、进一步的,根据所述前轮转速和所述后轮转速计算转速差,包括:
16、根据下式计算所述转速差:
17、
18、其中,σ为所述转速差,r前轮为所述前轮转速,r后轮为所述后轮转速。
19、进一步的,所述电动自行车包括霍尔传感器、控制器、车架和前轮,所述霍尔传感器固定在所述车架上,磁片固定在所述前轮上;检测前轮转速和后轮转速包括:
20、当所述前轮发生转动且每扫过一次所述磁片时,所述霍尔传感器发出脉冲信号;
21、将所述脉冲信号传输给所述控制器,所述控制器根据所述脉冲信号确定所述前轮转速。
22、进一步的,所述电动自行车包括电机,所述电机内部的定子上设置有三个霍尔传感器,转子上设置有磁钢;检测前轮转速和后轮转速包括:
23、当所述电机转动时,通过所述霍尔传感器采集信号的变换速度;
24、根据所述变换速度确定所述后轮转速。
25、第二方面,本发明实施例提供了电动自行车的辅助电子制动系统,所述系统包括:
26、检测模块,用于检测刹把开关是否闭合;
27、制动模块,用于在所述刹把开关为闭合的情况下,所述电动自行车进入制动状态;
28、计算模块,用于检测前轮转速和后轮转速,根据所述前轮转速和所述后轮转速计算转速差;
29、比较模块,用于将所述转速差与打滑的极限转速差和预警打滑的转速差进行比较,根据比较结果控制能量回收限流和占空比。
30、进一步的,所述比较模块具体用于:
31、在所述前轮转速小于所述后轮转速的情况下,如果所述转速差大于0且小于或等于所述预警打滑的转速差,则控制器的所述能量回收限流随所述转速差增大;
32、如果所述转速差大于所述预警打滑的转速差且小于或等于所述打滑的极限转速差,则所述控制器的所述能量回收限流达到最大限流,且三相短路的所述占空比随所述转速差增大;
33、如果所述转速差大于所述打滑的极限转速差,则所述控制器的所述三相短路的占空比达到最大。
34、第三方面,本发明实施例提供了电子设备,包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的方法。
35、第四方面,本发明实施例提供了具有处理器可执行的非易失的程序代码的计算机可读介质,所述程序代码使所述处理器执行如上所述的方法。
36、本发明实施例提供了电动自行车的辅助电子制动方法和系统,包括:检测刹把开关是否闭合;如果是,则电动自行车进入制动状态;检测前轮转速和后轮转速,根据前轮转速和后轮转速计算转速差;将转速差与打滑的极限转速差和预警打滑的转速差进行比较,根据比较结果控制能量回收限流和占空比;当制动力分配不均时,通过调节电机的动力输出控制刹车时的两个轮子的转速差,实现刹车时的车辆稳定,防止打滑。
37、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
38、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种电动自行车的辅助电子制动方法,其特征在于,所述方法包括:
2.根据权利要求1所述的电动自行车的辅助电子制动方法,其特征在于,将所述转速差与打滑的极限转速差和预警打滑的转速差进行比较,根据比较结果控制能量回收限流和占空比,包括:
3.根据权利要求1所述的电动自行车的辅助电子制动方法,其特征在于,将所述转速差与打滑的极限转速差和预警打滑的转速差进行比较,根据比较结果控制能量回收限流和占空比,包括:
4.根据权利要求1所述的电动自行车的辅助电子制动方法,其特征在于,根据所述前轮转速和所述后轮转速计算转速差,包括:
5.根据权利要求1所述的电动自行车的辅助电子制动方法,其特征在于,所述电动自行车包括霍尔传感器、控制器、车架和前轮,所述霍尔传感器固定在所述车架上,磁片固定在所述前轮上;检测前轮转速和后轮转速包括:
6.根据权利要求1所述的电动自行车的辅助电子制动方法,其特征在于,所述电动自行车包括电机,所述电机内部的定子上设置有三个霍尔传感器,转子上设置有磁钢;检测前轮转速和后轮转速包括:
7.一种电动自行车的辅助电子制动系统,其特征在于,所述系统包括:
8.根据权利要求7所述的电动自行车的辅助电子制动系统,其特征在于,所述比较模块具体用于:
9.一种电子设备,包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述权利要求1至6任一项所述的方法。
10.一种具有处理器可执行的非易失的程序代码的计算机可读介质,其特征在于,所述程序代码使所述处理器执行所述权利要求1至6任一项所述的方法。
技术总结
本发明提供了电动自行车的辅助电子制动方法和系统,包括:检测刹把开关是否闭合;如果是,则电动自行车进入制动状态;检测前轮转速和后轮转速,根据前轮转速和后轮转速计算转速差;将转速差与打滑的极限转速差和预警打滑的转速差进行比较,根据比较结果控制能量回收限流和占空比;当制动力分配不均时,通过调节电机的动力输出控制刹车时的两个轮子的转速差,实现刹车时的车辆稳定,防止打滑。
技术研发人员:朱泽琳,李靖,陈仁涛,秦宝林,张鹏达
受保护的技术使用者:天津爱玛车业科技有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!