一种仿生足及其多足昆虫仿生机器人
本发明涉及仿生机器人,特别是涉及一种仿生足及其多足昆虫仿生机器人。
背景技术:
1、随着人类探索自然界的脚步不断加快,各领域对具有应对复杂环境能力的自助机器人的需求越来越大。传统的轮式或履带式机器人虽然具有结构简单、控制简易的优点,但其对地面要求较高,不能适应各种复杂的地形。于是机器人逐渐走向了仿生化,出现了越来越多的多足机器人,这些多足机器人通过巧妙的机体结构与精妙的运动控制策略使自身能够穿越各种复杂地形,在这方面相对于轮式或履带式机器人取得了绝对优势。而在仿生化的同时,机器人还在持续向着微型化发展,更微小的体型意味着更灵巧的运动、更低的成本和更广的使用范围。在仿生化和微型化这两个机器人发展的必然趋势下,像蚂蚁等六足昆虫样行动灵活、体型微小的生物逐渐成为了研究、仿生的对象。目前昆虫仿生类机器人在行进时,其腿部行进方式多采用齿轮、电机以及舵机等驱动方式,腿部各关节由舵机传动实现抬升,腿部整体摆动依靠伺服电机和传动齿轮进行传动,如专利号为“202010208482.5”,专利名称“一种仿生蚂蚁探测机器人”中公开的传动机构。类似这种传统驱动结构,其结构较为复杂,传动响应速度较慢、传动效率较低、传动声响较大,导致目前昆虫仿生类机器人难以满足高行进速度、高反应速度以及隐匿性较强、无声的环境。
技术实现思路
1、本发明的目的是解决上述技术问题,提供一种仿生足及其多足昆虫仿生机器人,通过电磁作动器、刚性金属件以及各铰接件配合,利用了杠杆原理,形成了具有抬腿和摆腿的二自由度的仿生足,其传动方式相较于齿轮、驱动电机以及舵机配合方式,传动方式简单、可靠,结构件少、不复杂,响应快、行进迅速,噪声小,可满足高行进速度、高反应速度、隐匿性较强、无声需求高的环境。
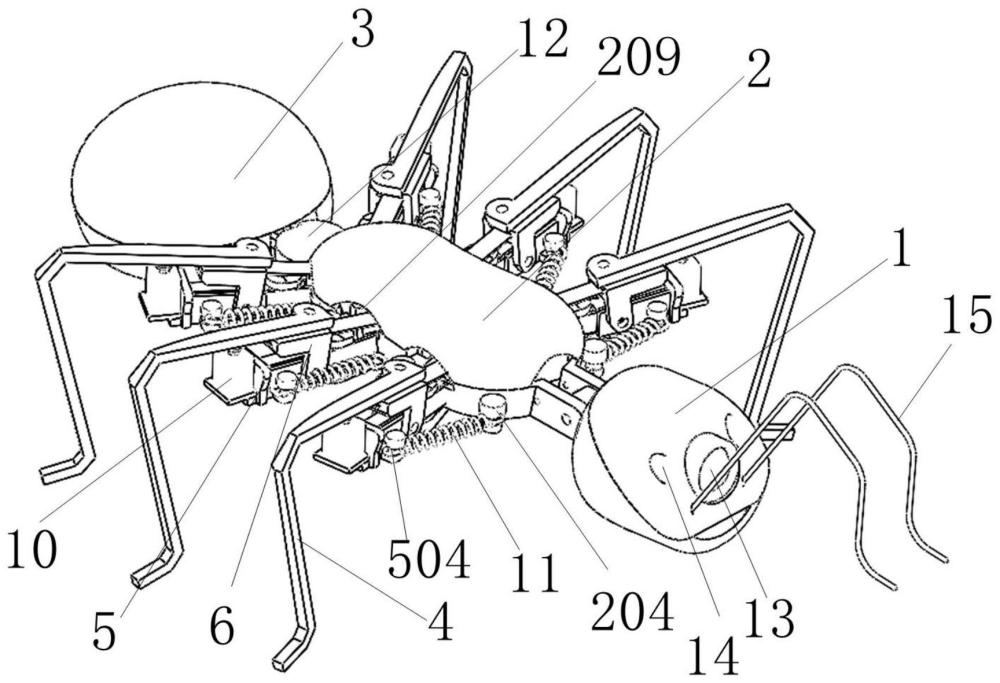
2、为实现上述目的,本发明提供了如下方案:本发明公开了一种仿生足,包括驱动机构和与多足昆虫腿部形状相仿的支撑足,所述驱动机构包括摆腿组件和抬腿组件;
3、所述摆腿组件包括摆腿铰接件、摆腿电磁作动器以及摆腿刚性金属件,所述摆腿铰接件的一端铰接在多足昆虫仿生机器人的仿生躯体上,所述摆腿铰接件和所述仿生躯体的铰接轴垂直于行进方向所在面,所述摆腿电磁作动器安装在所述仿生躯体内部,所述摆腿电磁作动器的活动部移动方向与行进方向相同,所述摆腿刚性金属件的一端与所述摆腿铰接件固定连接,所述仿生躯体上设有沿其长度方向延伸的长条开口,所述摆腿刚性金属件的另一端伸入所述条形开口并与所述摆腿电磁作动器的活动部连接,所述仿生躯体和所述摆腿铰接件远离所述摆腿电磁作动器的一端之间连接有弹性复位件;
4、所述抬腿组件包括抬腿铰接件、抬腿电磁作动器以及抬腿刚性金属件,所述抬腿铰接件的一端铰接在所述摆腿铰接件上,所述抬腿铰接件和所述摆腿铰接件的铰接轴平行于行进方向,所述支撑足固定在所述抬腿铰接件的另一端,所述抬腿电磁作动器安装在所述摆腿铰接件远离所述仿生躯体的一端,所述抬腿电磁作动器的活动部移动方向背向所述仿生躯体的腹底,所述抬腿刚性金属件固定连接在所述抬腿铰接件上,所述抬腿刚性金属件的一端与所述抬腿电磁作动器的活动部连接,所述抬腿刚性金属件的另一端向所述仿生躯体延伸。
5、优选地,所述弹性复位件为拉伸弹簧。
6、优选地,所述支撑足包括腿部和足部,所述腿部包括依次固定连接的腿节、胫节以及跗节,所述腿节和所述胫节连接处内侧形成夹角a,所述胫节和所述跗节连接处的内侧形成夹角b,所述跗节和所述足部固定连接,所述跗节和所述足部连接处的外侧形成夹角c。
7、还公开了一种多足昆虫仿生机器人,包括仿生躯体,所述仿生躯体上设置有多对上述的仿生足。
8、优选地,所述仿生躯体包括依次连接的头部、腹部以及尾部,所述腹部上设置有三对所述仿生足。
9、优选地,所述头部安装有摄像头和照明灯。
10、优选地,所述尾部内安装有远程图像传输设备,所述远程图像传输设备与所述摄像头电连接。
11、优选地,所述腹部内安装有控制主板,所述控制主板与所述摆腿电磁作动器、所述抬腿电磁作动器、所述远程图像传输设备、所述摄像头以及所述照明灯电连接。
12、优选地,所述腹部的腹底安装有用于供电的蓄电池,所述头部安装有用于给所述蓄电池充电的充电触角。
13、优选地,所述头部能够朝向或背向所述腹部的腹底方向转动连接在所述腹部上,所述头部和所述腹部铰接通过锁止构件锁止。
14、本发明相对于现有技术取得了以下技术效果:
15、本发明中的仿生足,通过电磁作动器、刚性金属件以及各铰接件配合,形成了具有抬腿和摆腿的二自由度的仿生足,摆腿电磁作动器通断电配合着弹性复位件,使得摆腿刚性金属件可像杠杆式的带动摆腿铰接件前后摆动,继而带动与其连接的抬腿铰接件前后摆动,实现支撑足的前后摆动,抬腿电磁作动器通断电配合着支撑腿自重,使得抬腿刚性金属件可像杠杆式的带动抬腿铰接件上下摆动,实现支撑足的上下抬腿,相较于齿轮、驱动电机以及舵机配合方式,传动方式简单、可靠,结构件少、不复杂,响应快、行进迅速,噪声小,可满足高行进速度、高反应速度、隐匿性较强、无声需求高的环境。
技术特征:
1.一种仿生足,其特征在于,包括驱动机构和与多足昆虫腿部形状相仿的支撑足,所述驱动机构包括摆腿组件和抬腿组件;
2.根据权利要求1所述的一种仿生足,其特征在于,所述弹性复位件为拉伸弹簧。
3.根据权利要求2所述的一种仿生足,其特征在于,所述支撑足包括腿部和足部,所述腿部包括依次固定连接的腿节、胫节以及跗节,所述腿节和所述胫节连接处内侧形成夹角a,所述胫节和所述跗节连接处的内侧形成夹角b,所述跗节和所述足部固定连接,所述跗节和所述足部连接处的外侧形成夹角c。
4.一种多足昆虫仿生机器人,其特征在于,包括仿生躯体,所述仿生躯体上设置有多对如权利要求1-3任意一项所述的仿生足。
5.根据权利要求1所述的一种多足昆虫仿生机器人,其特征在于,所述仿生躯体包括依次连接的头部、腹部以及尾部,所述腹部上设置有三对所述仿生足。
6.根据权利要求5所述的一种多足昆虫仿生机器人,其特征在于,所述头部安装有摄像头和照明灯。
7.根据权利要求6所述的一种多足昆虫仿生机器人,其特征在于,所述尾部内安装有远程图像传输设备,所述远程图像传输设备与所述摄像头电连接。
8.根据权利要求7所述的一种多足昆虫仿生机器人,其特征在于,所述腹部内安装有控制主板,所述控制主板与所述摆腿电磁作动器、所述抬腿电磁作动器、所述远程图像传输设备、所述摄像头以及所述照明灯电连接。
9.根据权利要求8所述的一种多足昆虫仿生机器人,其特征在于,所述腹部的腹底安装有用于供电的蓄电池,所述头部安装有用于给所述蓄电池充电的充电触角。
10.根据权利要求5所述的一种多足昆虫仿生机器人,其特征在于,所述头部能够朝向或背向所述腹部的腹底方向转动连接在所述腹部上,所述头部和所述腹部铰接通过锁止构件锁止。
技术总结
本发明公开了一种仿生足及其多足昆虫仿生机器人,属于仿生机器人技术领域,仿生足包括支撑足和驱动机构,驱动机构包括摆腿组件和抬腿组件;摆腿组件包括摆腿铰接件、摆腿电磁作动器、摆腿刚性金属件以及弹性复位件,摆腿刚性金属件的两端与摆腿铰接件、摆腿电磁作动器的活动部连接;抬腿组件包括抬腿铰接件、抬腿电磁作动器和抬腿刚性金属件,支撑足固定在抬腿铰接件上,抬腿刚性金属件与抬腿电磁作动器的活动部连接。仿生机器人包括仿生躯体,仿生躯体上设置有多对仿生足。电磁作动器、刚性金属件以及各铰接件配合,利用杠杆原理,形成了具有抬腿和摆腿的二自由度的仿生足,其传动方式简单、可靠,结构不复杂,响应快、行进迅速,噪声小。
技术研发人员:张益鑫,苏恒志,徐博涵,苗忆南,王少萍,杨梦琦,曾松
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!