一种AGV双电机协同控制的力矩分配系统和方法与流程
本发明属于agv控制,涉及一种agv双电机协同控制的力矩分配系统和方法。
背景技术:
1、自动导引小车(automated guided vehicle,agv)是一种用于设备搬运、自动化装配的智能化机器人,其属于轮式移动机器人系统,能够沿预先设定的路径行驶,且路径可以任意改变,是现代工业自动化物流输送系统的关键设备之一。
2、公告号为cn111942470b的中国发明专利,公开了一种关于forklift agv的提高差速轮转向系统纠偏能力的控制方法。通过重力传感器测量左前轮毂及右前轮毂所受的载荷大小,计算左前轮毂及右前轮毂所受到的力矩大小,测量摩擦系数;初始化其余误差参数,初始化有效路程相关函数算法;初始化后轮转角纠偏pid控制器;根据视觉导引计算结果,设定左前轮毂、右前轮毂的绝对速度大小;修订左前轮毂、右前轮毂转速;forklift agv开始行驶,角度pid纠偏器进行路径纠偏处理,并不断检测,返回实际路径值;根据误差累积,修订其余误差参数;将其余误差参数ξ返回有效路程算法函数,更新预置路径纠偏函数,得到新规划的预置路径。
3、公布号为cn112224037a的中国发明申请,公开了一种同侧双舵轮驱动agv的同步控制系统及方法,包括:agv,其上设有控制器、两个驱动器、两个舵轮,所述控制器控制两个驱动器,两个驱动器分别驱动两个舵轮,带动agv行驶;所述agv上还设有扭矩检测器,检测两个舵轮驱动电机的实际扭矩反馈给所述控制器;所述控制器根据所述两个舵轮驱动电机的实际扭矩的差值,进行闭环控制,实时调整两个舵轮的速度设定值。
4、公告号为cn113515133b的中国发明专利,公开了一种agv的力控方法、装置、电子设备及存储介质。该方法应用于设有两个驱动源的两轮差速agv,所述方法包括以下步骤:获取agv的运动参数;根据所述agv的运动参数计算虚拟力和虚拟力矩;根据所述虚拟力和所述虚拟力矩计算agv所需的控制力和控制力矩;根据所述控制力和所述控制力矩计算两个所述驱动源的驱动力矩;根据两个所述驱动源的驱动力矩分别控制两个所述驱动源工作,以使两个所述驱动源的输出力矩等于对应的所述驱动力矩。
5、公布号cn114312351a的中国发明申请,公开了一种agv小车运动控制方法、装置、设备及存储介质。该方法包括:获取agv小车的货物重量和目标速度;检测所述agv小车的目标状态;在所述目标状态为加速状态时,根据所述货物重量和目标速度确定电机补偿转矩;根据所述电机补偿转矩对所述agv小车进行加速补偿。
6、公布号为cn114987226a的中国发明申请,公开了一种四轮独立电驱港口agv的分层容错控制方法,控制系统包括上层控制模块、中层控制模块、下层控制模块和执行模块,上层控制模块包括mpc控制器和pi速度控制器,上层控制模块用于维持运行轨迹;中层控制器模块基于滑模控制理论,设计了横摆角速度滑模控制器和质心侧偏角滑模控制器,再通过失效分配策略计算最佳附加横摆力矩;下层控制模块包括容错控制分配器,当某个车轮电机失效后,容错控制分配器根据港口agv行驶所需的总纵向转矩和最佳附加横摆力矩对其余各车轮驱动转矩进行重新分配,使其余车轮电机转动,形成闭环控制。
7、公布号为cn116880503a的中国发明申请,公开了一种基于knn的重载agv横向稳定控制方法,包括以下步骤:1.根据重载agv不同的负载,将agv行驶工况分为5类,利用仿真软件采集不同工况下agv的运动状态数据;2.建立k最近邻knn分类器,利用采集的数据集进行训练与验证;3.设计基于模糊pid的非线性子控制器集,计算所需横摆力矩,根据力矩分配规则对四个驱动轮进行力矩分配;4.引入误差判断策略,根据质心侧偏角误差激活控制器,控制其横向稳定性。
8、目前agv普遍采用电子差速的方式进行驱动轮的控制,控制方式分为两层:上层进行导航,将导航指令最后转变为速度指令分别下发到下层驱动轮;下层驱动轮以极快的响应速度进行速度响应,调节速度,从而完成直行和转向等一系列操作。但是,这种不将两个驱动轮的状态进行联系,只是单纯给速度进行电子差速,并由速度经pi控制器生成控制力矩的电流的控制策略,对于agv在运行过程中所遇到的问题并不能完美解决。
9、agv运行过程中遇到的典型问题:其一是打滑,驱动轮的输出力矩大于地面所能提供的最大摩檫力,导致一侧或两侧驱动轮无法正常运行,对agv的正常运行造成很大影响;其二是当路面不好存在高低不平情况时,会出现负载突变,不利于agv的正常运行。基于以上分析,考虑到agv运行过程的工况,以及地面摩擦系数的影响,要保证低速大力矩和高速大力矩两种工况下agv的正常运行,综合考虑双电机的状态和地面的影响,从而合理分配双电机的扭矩输出是必要的。
技术实现思路
1、本发明的目的之一是提供一种agv双电机协同控制的力矩分配系统,通过设置三层控制层,考虑agv运行过程的极限工况和地面摩擦系数的影响,合理分配双电机的扭矩输出,保障agv的正常运行。本发明的这一目的通过以下具体技术方案实现。
2、一种agv双电机协同控制的力矩分配系统,其特征在于,所述力矩分配系统包括三层控制层:驱动力矩决策层、力矩分配优化层和单轮防滑控制层,三层控制层的架构分别为:
3、(1)驱动力矩决策层
4、(1-1)采集和处理agv的运行参数;
5、(1-2)判断agv的运行为直行还是转弯工况;
6、(1-3)对于转弯工况,基于二自由度模型输出理想横摆角速度;
7、(1-4)将理想横摆角速度与agv实际横摆角速度之差作为控制变量,通过pi控制器决策横摆力矩,控制横摆力矩通过左右电机差扭的方式实现;
8、(2)力矩优化分配层
9、(2-1)根据总的力矩,先对左右电机进行力矩的平均分配;
10、(2-2)依据差扭力矩,对左右电机的力矩进行增减;
11、(2-3)差扭力矩下,若增加扭矩达到最大输出力矩,则另一侧减去同样变化量的扭矩,保证左右力矩的增减量相同;
12、(2-4)对于负载突变情况,当一侧电机的输出力矩需求过大被限幅时,另一侧电机的输出力矩相应增加,保证总的需求力矩被满足;
13、(3)单轮防滑控制层
14、(3-1)对单轮是否发生滑转进行判断;
15、(3-2)判断车轮发生滑转,且agv处于运行状态时,进入驱动防滑状态:电机的输出力矩逐步下降,直至滑转消失,此时的力矩为滑转力矩;滑转侧降低的力矩由非滑转侧电机补偿,上限为滑转力矩;
16、(3-3)对于负载突变情况,限制负载增加侧电机的输出力矩上限为滑转力矩,另一侧电机输出力矩降低等额的力矩输出;
17、(3-4)判断车轮未发生滑转,且电机的输出力矩需求小于滑转力矩时,进入正常驱动状态。
18、进一步的,(1-1)中所述运行参数包括agv负载的力矩、车身自身的重量、转向角度、车速和轮距。
19、进一步的,(1-3)中所述理想横摆角速度如下式所示:
20、
21、式中,为理想横摆角速度,rad/s;δ为转向角度,rad;v为车速,m/s;l为轮距,m。
22、进一步的,(2-3)中所述最大输出力矩为单轮额定输出力矩的1.5倍。
23、进一步的,(3-1)中对单轮是否发生滑转进行判断的公式如下:
24、
25、式中,λ为车轮滑转率;ω为车轮角速度,rad/s;r为车轮半径,m;v为车速,m/s;
26、当λ超过20%时,认为车轮发生滑转。
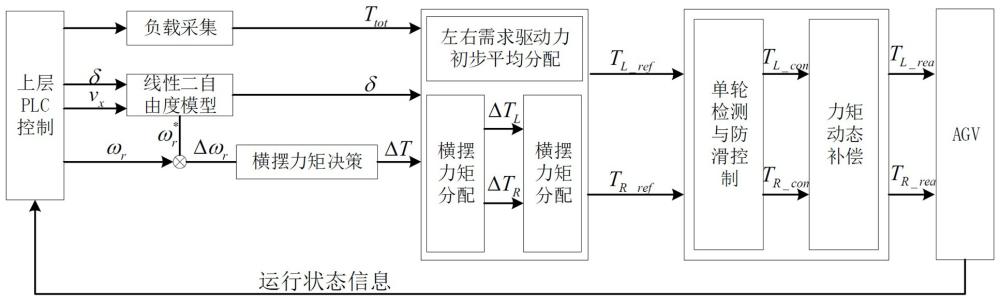
27、本发明的另一发明目的提供一种通过上述力矩分配系统分配力矩的方法,其特征在于,包括以下步骤:
28、s1通过传感器和磁导航采集agv参数数据,包括负载重量mref,车速v,转向角度δ;
29、s2根据转向角度δ和车速v,通过线性二自由度模型输出理想横摆角速度
30、s3将pi控制器作为横摆力矩决策层,理想横摆角速度与反馈的横摆角速度ωr的差值δωr,经过pi控制器得到总的差扭力矩δt;
31、s4将总重量换算为总的驱动力矩ttot,将其与转向角δ和总的差扭力矩δt作为力矩分配层的输入;
32、s5将总的驱动力矩ttot按照平均分配原则分配到左右驱动轮
33、s6基于力矩变化相同从而保证总力矩不变原则,平均分配差扭力矩δt;
34、s7基于转向角度确定左右驱动轮差扭力矩的正负
35、s8增加差扭力矩的驱动轮与驱动轮的最大输出力矩进行比较,驱动轮的实际力矩为两者比较的较小值;
36、s9基于外侧轮力矩的变化量和力矩变化相同原则,内侧轮减少相同变化量的差扭力矩;
37、s10得到的左右驱动轮力矩作为驱动轮的力矩给定;
38、s11计算车轮滑转率λ,确定是否发生滑转;
39、s12若不发生滑转,为正常驱动状态,则力矩分配结束;
40、s13若发生滑转,判断滑转驱动轮,逐步减小其输出力矩,直至脱离滑转,此时的力矩为滑转力矩;总的力矩减去滑转力矩,与驱动轮的最大输出力矩进行比较,较小值为另一侧驱动轮的力矩,并且驱动轮的最大输出限制为滑转力矩,保证双轮的正常运行;
41、s14当整车完全脱离滑转状态之后,驱动轮的最大输出限制恢复为最大输出力矩。
42、本发明具有以下有益技术效果:本发明提供了一种agv双电机协同控制的力矩分配系统和方法,针对agv实际运行中可能面临的打滑、横移、负载突变等和力矩有关的极限工况,提出了解决方案。同时,对于非极限工况,该力矩分配方案同样可以改善agv的整体运行性能。
- 还没有人留言评论。精彩留言会获得点赞!