基于EPS的车道偏离预警系统和方法及车辆与流程
本发明涉及车辆,具体涉及一种基于eps的车道偏离预警系统和方法及车辆。
背景技术:
1、现在的车辆都依赖于驾驶员的驾驶,但是在长途高速驾驶时,驾驶员会产生疲劳感,一旦驾驶员注意力不集中,车辆会偏离车道线,甚至发生碰撞、侧翻等危险的行为,因此近些年来各汽车厂商在大力发展汽车主动安全技术,车道偏离预警系统也是在此背景下发展起来的。
2、当前车道偏离预警系统在识别到车辆偏移时,会发送指令使eps电机以固定频率和幅值进行一段时间的振动,但是这种固定频率和幅值的振动带给驾驶员的振动差异感不明显,会影响驾驶员的驾驶感受,现在也有变频率和幅值的振动,这种振动虽然能让驾驶员感受到振动差异感,但这种差异不能让驾驶员感受到车辆偏离车道线的程度,缺少方向盘振动的层次感,同样降低了驾驶员的驾驶感受。
技术实现思路
1、本发明要解决的技术问题是提供一种能够解决当前eps系统正余弦振动时幅值和频率不随车辆偏离程度和横向偏离速度变化的问题,同时为eps系统的正余弦振动的幅值和频率提供了更合理的变化依据,让驾驶员能够更好的感受自车在车道线中的位置变化,进而更好的提醒驾驶员规避风险。
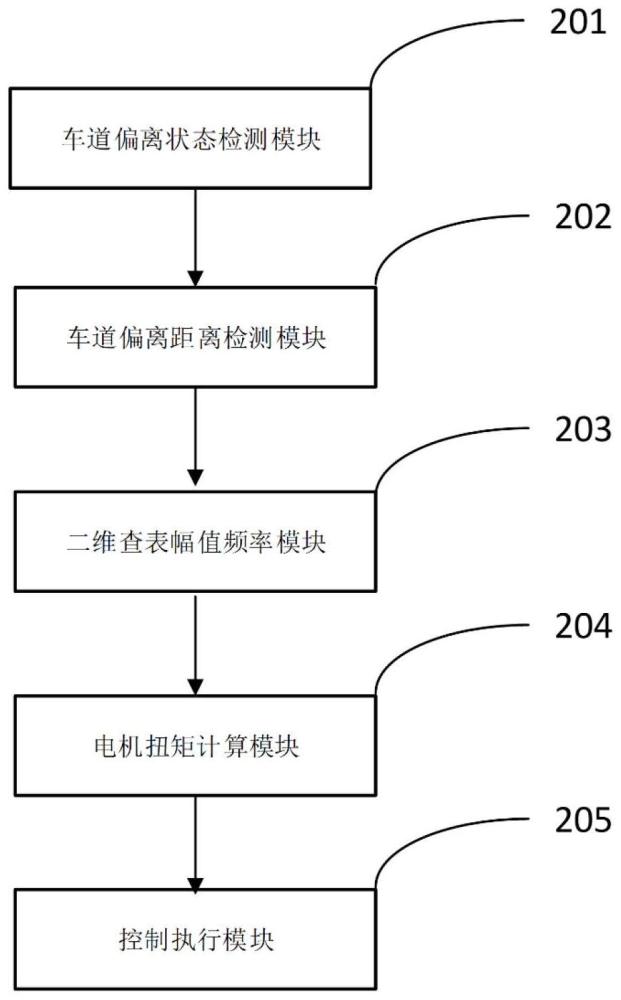
2、为解决上述技术问题,本发明提供一种基于eps的车道偏离预警系统,包括:
3、车道偏离状态检测模块,用于判断当前车辆是否偏离车道,并给eps发送指令信息;
4、车道偏离距离检测模块,用于计算车辆偏离车道中心的偏离距离,并根据当前时刻和上一时刻偏离距离的差值计算车辆偏离速度;
5、二维查表幅值频率计算模块,用于根据所述偏离距离和偏离速度进行查表,得到eps电机实时输出的振动幅值和频率;所述幅值和频率随着偏离距离和偏离速度的增加而增加;
6、电机扭矩计算模块,用于根据查表得到的振动幅值和频率进行正余弦函数的计算,得到振动的电机扭矩;
7、控制执行模块,用于控制eps电机输出振动的电机扭矩。
8、优选地,当所述车道偏离预警系统打开时,方向盘振动预警标志置为0;当车道偏离状态检测模块判断当前车辆偏离车道时,方向盘振动预警标志位置为1。
9、优选地,用于查表的二维图为频率二维图和幅值的二维图。
10、优选地,所述幅值的查表范围为0.4-1nm。
11、优选地,所述频率的查表范围为10-30hz。
12、优选地,用于查表的二维图根据不同的偏离速度被划分为五个递增的区间范围。
13、优选地,所述正余弦函数的公式为:
14、
15、其中f为频率,a为幅值,为初相位。
16、本发明还提供一种基于eps的车道偏离预警方法,包括以下步骤:
17、步骤101,方向盘振动预警标志为0;
18、步骤102,当检测到车辆车道偏离后,方向盘振动预警标志位为1;
19、步骤103,计算车道偏离距离;
20、步骤104,通过车辆偏离距离实时计算车辆偏离速度;
21、步骤105,对车道偏离速度进行等区间划分范围;
22、步骤106,根据车辆偏离距离和速度进行幅值和频率的二维查表;
23、步骤107,以当前的幅值和频率计算eps电机振动扭矩;
24、步骤108,eps电机输出正弦振动扭矩。
25、本发明还提供一种车辆包括前述的基于eps的车道偏离预警系统。
26、本发明还提供一种车辆应用前述的基于eps的车道偏离预警方法对车辆进行预警。
技术特征:
1.一种基于eps的车道偏离预警系统,其特征在于,包括:
2.根据权利要求1所述的基于eps的车道偏离预警系统,其特征在于,当所述车道偏离预警系统打开时,方向盘振动预警标志置为0;当车道偏离状态检测模块判断当前车辆偏离车道时,方向盘振动预警标志位置为1。
3.根据权利要求1所述的基于eps的车道偏离预警系统,其特征在于,用于查表的二维图为频率二维图和幅值的二维图。
4.根据权利要求3所述的基于eps的车道偏离预警系统,其特征在于,所述幅值的查表范围为0.4-1nm。
5.根据权利要求3所述的基于eps的车道偏离预警系统,其特征在于,所述频率的查表范围为10-30hz。
6.根据权利要求3所述的基于eps的车道偏离预警系统,其特征在于,用于查表的二维图根据不同的偏离速度被划分为五个递增的区间范围。
7.根据权利要求1所述的基于eps的车道偏离预警系统,其特征在于,所述正余弦函数的公式为:
8.一种基于eps的车道偏离预警方法,其特征在于,包括以下步骤:
9.一种车辆,其特征在于,包括如权利要求1至7中任意一项所述的基于eps的车道偏离预警系统。
10.一种车辆,其特征在于,应用如权利要求8所述的基于eps的车道偏离预警方法对车辆进行预警。
技术总结
本发明公开了一种基于EPS的车道偏离预警系统,包括:车道偏离状态检测模块,用于判断当前车辆是否偏离车道,并给EPS发送指令信息;车道偏离距离检测模块,用于计算车辆偏离车道中心的偏离距离,并根据当前时刻和上一时刻偏离距离的差值计算车辆偏离速度;二维查表幅值频率计算模块,用于根据所述偏离距离和偏离速度进行查表,得到EPS电机实时输出的振动幅值和频率;所述幅值和频率随着偏离距离和偏离速度的增加而增加;电机扭矩计算模块,用于根据查表得到的振动幅值和频率进行正余弦函数的计算,得到振动的电机扭矩;控制执行模块,用于控制EPS电机输出振动的电机扭矩。
技术研发人员:龚城,陈梦民,龙杏,杨德,李港,张彧,万锐,李威尔,陈杰
受保护的技术使用者:博世华域转向系统(武汉)有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!