一种四轮独立驱动控制系统及其控制方法与流程
本发明涉及电动车驱动控制领域,具体是四轮独立驱动控制系统。
背景技术:
1、在现代汽车工业中,随着对性能、安全性、能效和环保要求的不断提升,对汽车动力传动系统的设计提出了更高的挑战。传统上,汽车采用中央驱动方式,即通过一个发动机产生动力,然后通过变速箱、传动轴等传动系统将动力传递到车轮上。这种设计在成本和制造流程上有一定优势,但在动力分配、车辆操控和适应性方面存在明显不足。
2、尤其在恶劣路况或极端驾驶条件下,中央驱动系统的局限性变得更加明显。例如,车辆在湿滑路面或者行驶过程中遇到紧急情况时,中央驱动系统往往无法提供精确的动力和制动控制,这可能会导致车辆失去牵引力,增加发生事故的风险。此外,中央驱动方式在分配动力时存在固有的不均匀性,这会影响车辆的操控稳定性和行驶舒适性。
3、在能效方面,中央驱动系统由于动力传输过程中的损耗,通常效率较低,这对于追求高能源利用效率的电动汽车来说尤其不利。此外,随着环保法规的日益严格,传统的中央驱动方式在降低排放和提高能源利用效率方面面临着巨大挑
4、因此,有必要开发一种新的汽车动力控制系统,以提高车辆的动态性能和安全性,同时优化能源消耗,以满足未来汽车工业的发展需求。本发明提出的四轮独立驱动控制系统,将针对传统中央驱动方式的不足提供一种创新的解决方案,旨在通过技术革新来实现这一目标。
技术实现思路
1、本发明的目的在于提供四轮独立驱动控制系统,四轮独立驱动系统可以对每个车轮的电动机进行独立控制,实现精确的动力分配和制动。这种控制在应对湿滑路面或紧急避险时能够提供更好的牵引力和操控性,从而提高车辆的安全性,通过对每个轮子的独立控制,可以根据车辆的行驶状态和驾驶员的意图,进行动态的动力分别调整,进一步提升车辆的加速性能和操控稳定性。独立驱动系统可以根据实际需要调整各轮的动力输出,减少不必要的能源浪费,从而提高整体的能源效率。
2、本发明为实现上述目的,通过以下技术方案实现:
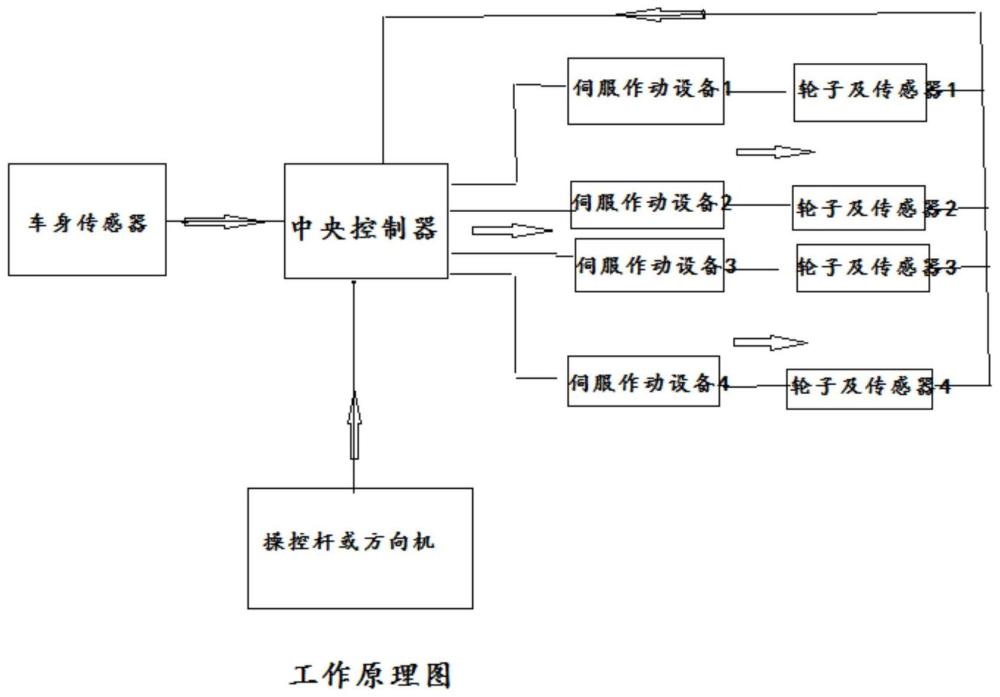
3、一种四轮独立驱动控制系统,包括四个与车辆的四个轮子分别对应的电动机,所述电动机为伺服电动机;
4、控制单元,配置用于独立控制每个电动机的动力输出,以便根据车辆的行驶状态和驾驶员的输入独立调节每个轮子的动力和制动力;
5、传感器组,用于检测车辆的速度、加速度、轮子转速、车辆姿态以及外部环境条件,并将检测数据发送至控制单元;
6、通信接口,用于接收驾驶员输入和与车辆其他系统交换信息。
7、所述控制单元进一步配置用于执行动力矢量控制,通过调整各轮电动机的动力输出差异来改善车辆的操控性能。
8、所述传感器组还包括用于检测路面条件的传感器,以便控制单元根据路面状况调整动力输出以最大化牵引力。
9、所述控制系统还包括能量管理模块,该模块配置用于优化各轮电动机的能量消耗,提高整车的能效。
10、所述控制单元通过控制电流大小实现对每个电动机的控制。
11、一种使用前述任一权利要求所述的四轮独立驱动控制系统的控制方法,该方法包括以下步骤:
12、s1:接收来自传感器组的车辆状态数据和外部环境数据;
13、s2:接收驾驶员的操作输入;
14、s3:根据接收到的数据和输入,独立计算每个轮子所需的动力和制动力;
15、s4:控制每个相应电动机输出计算得到的动力和制动力。
16、所述控制方法还包括根据车辆当前的能源状态和预期的行驶需求,动态调整能量管理模块以优化能源消耗。
17、所述控制方法进一步包括在检测到紧急驾驶情况时,自动调整各轮的动力输出以提高车辆的稳定性和安全性;
18、所述方法进一步包括调整各轮动力输出以实现车辆的动力矢量控制,从而优化车辆的操控性和行驶动态。
19、对比现有技术,本发明的有益效果在于:
20、四轮独立驱动系统可以对每个车轮的电动机进行独立控制,实现精确的动力分配和制动。这种控制在应对湿滑路面或紧急避险时能够提供更好的牵引力和操控性,从而提高车辆的安全性,通过对每个轮子的独立控制,可以根据车辆的行驶状态和驾驶员的意图,进行动态的动力分别调整,进一步提升车辆的加速性能和操控稳定性。独立驱动系统可以根据实际需要调整各轮的动力输出,减少不必要的能源浪费,从而提高整体的能源效率。
技术特征:
1.一种四轮独立驱动控制系统,其特征在于:包括四个与车辆的四个轮子分别对应的电动机,所述电动机为伺服电动机;
2.根据权利要求1所述四轮独立驱动控制系统,其特征在于:所述控制单元进一步配置用于执行动力矢量控制,通过调整各轮电动机的动力输出差异来改善车辆的操控性能。
3.根据权利要求1或2所述四轮独立驱动控制系统,其特征在于:所述传感器组还包括用于检测路面条件的传感器,以便控制单元根据路面状况调整动力输出以最大化牵引力。
4.根据权利要求3所述四轮独立驱动控制系统,其特征在于:所述控制系统还包括能量管理模块,该模块配置用于优化各轮电动机的能量消耗,提高整车的能效。
5.根据权利要求1所述四轮独立驱动控制系统,其特征在于:所述控制单元通过控制电流大小实现对每个电动机的控制。
6.一种使用前述任一权利要求所述的四轮独立驱动控制系统的控制方法,该方法包括以下步骤:
7.根据权利要求6所述控制方法,其特征在于:所述控制方法还包括根据车辆当前的能源状态和预期的行驶需求,动态调整能量管理模块以优化能源消耗。
8.根据权利要求1所述四轮独立驱动控制系统,其特征在于:所述控制方法进一步包括在检测到紧急驾驶情况时,自动调整各轮的动力输出以提高车辆的稳定性和安全性;
技术总结
本发明公开了一种四轮独立驱动控制系统及其控制方法,主要涉及新能源电动车驱动控制领域。包括四个与车辆的四个轮子分别对应的电动机,所述电动机为伺服电动机;控制单元,配置用于独立控制每个电动机的动力输出,以便根据车辆的行驶状态和驾驶员的输入独立调节每个轮子的动力和制动力;传感器组,用于检测车辆的速度、加速度、轮子转速、车辆姿态以及外部环境条件,并将检测数据发送至控制单元;通信接口。本发明的有益效果在于:四轮独立驱动系统可以对每个车轮的电动机进行独立控制,实现精确的动力分配和制动。这种控制在应对湿滑路面或紧急避险时能够提供更好的牵引力和操控性,从而提高车辆的安全性。
技术研发人员:曾旭文
受保护的技术使用者:河池市宜州区凯文立电池能源有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!