一种空地两用救援机器人及变形方法与流程
本发明涉及高速公路救援,具体涉及一种空地两用救援机器人及变形方法。
背景技术:
1、救援机器人是一种用于紧急救援任务的自动化设备,它们通常被用于搜索和救援任务,以帮助救援人员更快速、更有效地完成任务。救援机器人可以适应不同的环境,如水下、地下、火灾现场等。它们可以通过遥控或自主控制来操作,并且可以配备各种传感器和设备,以实现不同的功能,如探测生命迹象、切割障碍物、操作机械臂等。
2、然而,现有的救援机器人仍然存在一些问题。例如,一些机器人的移动能力和适应能力有限,无法适应复杂的环境;例如,普通的飞行器一般只能飞行,在隧道等空间较矮的地方,无法很好的进行飞行,因此,需要一种空地两用救援机器人来解决这些问题。
技术实现思路
1、为解决以上技术问题,本发明提供了一种空地两用救援机器人及变形方法,能够在行驶模式和飞行模式之间自由切换,以满足道路和隧道内侦查和救援过程中的不同需求。
2、本发明采用以下技术方案:
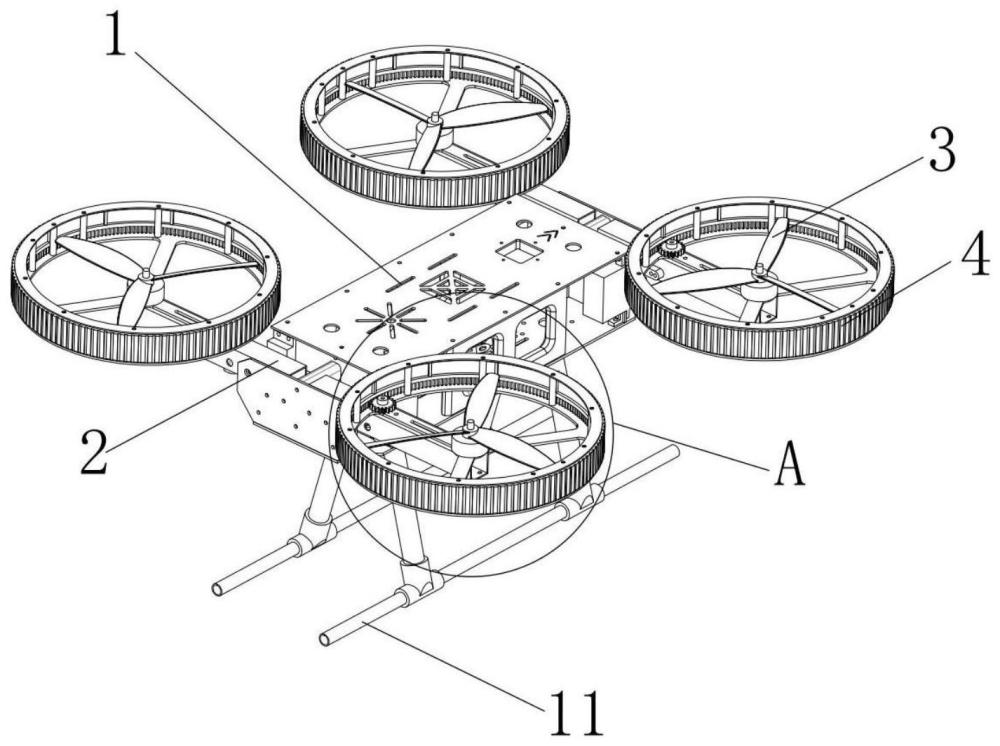
3、一种空地两用救援机器人,包括:机器人本体,下方设有支撑架;至少四个转动臂,一端转动配合于机器人本体上,包括转动配合的驱动齿轮;螺旋桨,转动配合于转动臂远离机器人本体的一端;转动外框,与螺旋桨同轴设置,内侧壁设有与驱动齿轮啮合的从动齿;所述救援机器人具有第一状态和第二状态,于所述第一状态下,所述转动臂、转动外框与螺旋桨水平设置;于所述第二状态下,所述转动臂、转动外框与螺旋桨竖直设置,转动外框抵于地面,驱动齿轮驱动转动外框独立转动且支撑架悬空,能够在行驶模式和飞行模式之间自由切换,以满足道路和隧道内侦查和救援过程中的不同需求。
4、作为优选,所述转动臂绕着机器人本体转动致使救援机器人实现第一状态和第二状态的转换。
5、作为优选,所述机器人本体上设有安装部,所述转动臂一端转动配合于安装部上,安装部上设有转动转动臂的第一电机。
6、作为优选,所述安装部内设有十字形安装架,于所述第一状态下,所述转动臂一端位于十字形安装架上。
7、作为优选,所述转动外框包括位于转动臂上的底盘、位于底盘上的转动环以及位于转动环上的上盖,底盘与上盖之间具有支撑柱,转动环内壁设有从动齿。
8、作为优选,所述转动臂为贯通结构,内部设有第二电机,底盘上设有安装孔,所述第二电机的驱动端从安装孔伸出并连接有驱动齿轮。
9、作为优选,所述底盘的圆心处设有第三电机,第三电机的驱动端上设有螺旋桨。
10、作为优选,于所述第一状态下,第三电机驱动螺旋桨转动;于所述第二状态下,转动外框抵于地面,第二电机驱动驱动齿轮转动从而带动转动环转动。
11、一种空地两用救援机器人的变形方法,包括空地两用救援机器人,还包括:从第一状态向第二状态转换时:支撑架抵于地面,转动臂转动90°致使转动外框抵于地面,此时,机器人本体被顶起一定高度,支撑架下端悬空设置。
12、作为优选,从第二状态向第一状态转换时:转动臂转动90°致使转动外框水平设置,机器人本体由于重力向下运动一定距离,支撑架下端抵于地面。
13、与现有技术相比,本发明具有以下优点:本发明公开一种空地两用救援机器人及变形方法,包括:机器人本体、至少四个转动臂、螺旋桨、转动外框;所述救援机器人具有第一状态和第二状态,于所述第一状态下,所述转动臂、转动外框与螺旋桨水平设置;于所述第二状态下,所述转动臂、转动外框与螺旋桨竖直设置,转动外框抵于地面,驱动齿轮驱动转动外框独立转动且支撑架悬空,能够在行驶模式和飞行模式之间自由切换,以满足道路和隧道内侦查和救援过程中的不同需求。
技术特征:
1.一种空地两用救援机器人,其特征在于,包括:
2.根据权利要求1所述的一种空地两用救援机器人,其特征在于,所述转动臂(2)绕着机器人本体(1)转动致使救援机器人实现第一状态和第二状态的转换。
3.根据权利要求1所述的一种空地两用救援机器人,其特征在于,所述机器人本体(1)上设有安装部(12),所述转动臂(2)一端转动配合于安装部(12)上,安装部(12)上设有转动转动臂(2)的第一电机(13)。
4.根据权利要求3所述的一种空地两用救援机器人,其特征在于,所述安装部(12)内设有十字形安装架(14),于所述第一状态下,所述转动臂(2)一端位于十字形安装架(14)上。
5.根据权利要求1所述的一种空地两用救援机器人,其特征在于,所述转动外框(4)包括位于转动臂(2)上的底盘(42)、位于底盘(42)上的转动环(43)以及位于转动环(43)上的上盖(44),底盘(42)与上盖(44)之间具有支撑柱(45),转动环(43)内壁设有从动齿(41)。
6.根据权利要求5所述的一种空地两用救援机器人,其特征在于,所述转动臂(2)为贯通结构,内部设有第二电机(22),底盘(42)上设有安装孔(45),所述第二电机(22)的驱动端从安装孔(45)伸出并连接有驱动齿轮(21)。
7.根据权利要求6所述的一种空地两用救援机器人,其特征在于,所述底盘(42)的圆心处设有第三电机(5),第三电机(5)的驱动端上设有螺旋桨(3)。
8.根据权利要求7所述的一种空地两用救援机器人,其特征在于,于所述第一状态下,第三电机(5)驱动螺旋桨(3)转动;于所述第二状态下,转动外框(4)抵于地面,第二电机(22)驱动驱动齿轮(21)转动从而带动转动环(43)转动。
9.一种空地两用救援机器人的变形方法,其特征在于,包括如权利要求1-8任一所述的空地两用救援机器人,还包括:
10.根据权利要求9所述的一种空地两用救援机器人的变形方法,其特征在于,还包括:
技术总结
本发明公开一种空地两用救援机器人及变形方法,包括:机器人本体,下方设有支撑架;至少四个转动臂,一端转动配合于机器人本体上,包括转动配合的驱动齿轮;螺旋桨,转动配合于转动臂远离机器人本体的一端;转动外框,与螺旋桨同轴转动配合,内侧壁设有与驱动齿轮啮合的从动齿;所述救援机器人具有第一状态和第二状态,于所述第一状态下,所述转动臂、转动外框与螺旋桨水平设置;于所述第二状态下,所述转动臂、转动外框与螺旋桨竖直设置,转动外框抵于地面,驱动齿轮驱动转动外框独立转动且支撑架悬空,能够在行驶模式和飞行模式之间自由切换,以满足道路和隧道内侦查和救援过程中的不同需求。
技术研发人员:陈建甬,齐腾涛,刘松荣,应豪,柯威曳
受保护的技术使用者:浙江交投高速公路运营管理有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!