面向轮毂电机故障和失效下多轴车辆集成优化控制方法
本发明属于多轴车辆多轮独立驱动横向动力学控制,具体涉及面向轮毂电机故障和失效下多轴车辆集成优化控制方法。
背景技术:
1、随着环境污染和能源问题日益严重,传统汽车工业的发展受到了巨大的冲击。传统汽车在带来便利的同时,也带来了许多问题,如交通事故和废气排放。出于安全和节能的考虑,分布式轮驱动汽车近年来引起了人们的关注,成为一个热点。事实上,经过研究人员的不懈努力,分布式轮毂驱动汽车具有转向冗余和快速电机响应的特点,往往比普通汽车更具机动性。在汽车驾驶中,控制灵活性非常重要,几乎没有任何其他汽车可以与分布式轮毂驱动汽车相媲美。轮毂电机可以独立控制每个车轮,从而快速准确地完成横摆力矩的分配。总的来说,这项技术是缓解能源短缺的有效途径,许多学术研究人员仍在寻求探索更多潜力。
2、自从第一辆汽车问世以来,交通事故一直令人头疼,车辆安全必须得到足够的重视。对于分布式轮毂驱动汽车,有两种主要方法可以提高操纵稳定性:转向和电机系统控制。如果仅仅依靠前者,车辆在极端情况下很容易失去控制。后者通常采用分层控制结构来实现驱动冗余度的降低,分为顶层和底层控制器。
3、近年来,顶层控制器的研究已经建立起来,并提出了许多有效的算法。常用的算法包括模糊控制、最优控制、滑模控制和自适应算法。考虑到多轴车辆的不确定因素,在滑模控制(smc)的基础上计算期望横摆力矩。众所周知,smc是处理不确定非线性问题的有效方法,但当采用饱和函数来消除抖振现象时,会影响控制系统的鲁棒性。另一方面,最优控制策略能够减少控制输入,但由于不确定性扰动和建模误差,控制效果可能会降低。为了克服最优控制和滑模控制的缺点,提出了一类将最优跟踪控制器与滑模控制律相结合的鲁棒最优控制策略。最优控制器是基于线性标称模型获得的,滑模控制律是从定义的积分滑模流形导出的,在存在非线性建模和环境不确定性的情况下可以保持控制效果。然而,不可避免的抖振问题被忽视,至今仍未得到解决。
4、对于底层控制器,应在满足顶层控制器要求的前提下进行横摆力矩分配。一般来说,现有的横摆力矩矢量控制算法分为两类。一种是遵循既定规则的分配算法,通常考虑车辆和轮胎信息。转矩分配的另一种方法是求解包含稳定性或其他指标的优化问题。但是,现有的技术方法都只关注如何通过将四个车轮作为一个整体来协调优化目标之间的关系,而不是为单个执行器设置协调系数。由于底层控制器中执行器的数量大于系统自由度的数量,因此考虑不同执行器的重量调整更为合理。
技术实现思路
1、针对现有技术中关于顶层控制器的抖振问题和底层控制器的调整系数不合理的问题,本发明提供了一种考虑稳定性和经济性的面向轮毂电机故障和失效下多轴车辆集成优化控制方法。本发明设计了轮毂电机故障下的横摆力矩分配策略和轮毂电机失效下的横摆力矩重构分配策略,进一步通过利用高阶滑模控制算法和最优控制算法实现轮毂电机故障和失效下多轴车辆集成优化控制。
2、面向轮毂电机故障和失效下多轴车辆集成优化控制方法,包括以下步骤:
3、步骤一,建立多轴车辆的动力学模型和参考行为;
4、所述动力学模型中,纵向、横向和偏航运动以及车轮旋转描述如下:
5、
6、
7、
8、
9、其中,m为车辆的总质量;iz是指偏航惯性矩;jw是车轮和电机的惯性矩;δ表示前轮转向角;vx和vy分别代表纵向和横向速度;w表示横摆角速度,β表示侧滑角;lf和lr分别表示重心到前桥和后桥的距离;d和r表示卡车宽度和滚动半径。fxi和fyi分别表示轮胎的纵向力和横向力。wi表示车轮转速,ti表示电动机的输出转矩。i=fl,fr,rl,rr,表示左前轮、右前轮、左后轮和右后轮。dd是中间变量。
10、将轮胎侧向力与滑移角之间的关系视为线性关系,因此前轮组和后轮组的轮胎侧向力fyf和fyr分别计算如下:
11、
12、其中cf和cr分别表示前轮和后轮的转弯刚度。αf和αr分别是前后车轮的滑移角,计算为
13、
14、其中,δδ表示附加前轮角度。
15、为了获得附加前轮角度δδ和横摆力矩δmz,控制输入选择为u=[δδδmz]t。因此,状态空间方程表示为
16、
17、其中,
18、根据稳态条件下的车辆动力学模型,推导出参考横摆角速度
19、
20、其中,是操纵失灵的梯度系数,cf0和cro表示前轮和后轮的平均理想转弯刚度系数。
21、考虑到轮胎与道路的摩擦限制,理想横摆角速度更改为
22、
23、其中,c为安全系数,μ为轮胎道路摩擦系数,g为重力系数,sign()为符号函数。
24、将参考侧滑角视为零,建立车辆的参考行为xd=[βd wd]t,βd为理想侧滑角。
25、步骤二,根据轮胎的非线性引起的轮胎转弯刚度变化引起的车辆动力学系统的不确定性,对多轴车辆的动力学系统进行改写,得到不确定性系统;
26、前轮组和后轮组的转弯刚度分别描述如下
27、
28、状态空间方程被进一步改写为
29、
30、其中,δa,δb和δe是有界不确定项。a0,b0和e0表示具有不确定性系统的标称部分,其中
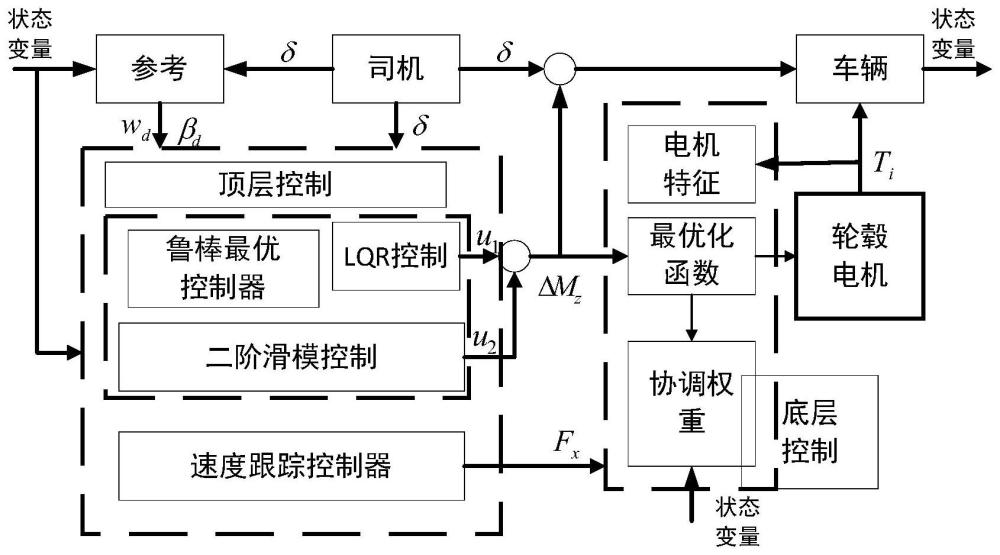
31、步骤三,基于多轴车辆的动力学系统,对其在轮毂电机故障和轮毂电机失效下进行顶层控制器设计;
32、顶层控制器包括速度跟踪控制器和ro(robust optimal,鲁棒最优)控制器,其中ro控制器结合了lqr控制与滑模控制,为多轴车辆系统提供主动前轮转向afs和直接横摆力矩dyc命令;具体设计方法如下:
33、步骤301,设计基于标称模型的lqr控制;
34、忽略轮毂电机故障和轮毂电机失效,标称状态空间方程表示为:
35、
36、同时,基于车辆的参考行为xd,假设参考值满足以下表达式
37、
38、表示未知的误差项。
39、将跟踪误差定义为e=[βd-βwd-w]t,其导数写成
40、
41、接下来,将优化目标函数选择为
42、
43、其中是半正定的矩阵,是一个避免高控制输入的正定矩阵,t为时间。
44、根据lqr控制策略,标称模型的最优控制律计算为
45、
46、其中矩阵p可以通过求解riccati矩阵代数方程来导出。
47、将lqr控制律(16)代入标称跟踪误差模型(14),得到
48、
49、对轮毂电机故障和轮毂电机失效下的多轴车辆系统进行建模,考虑到轮毂电机的故障,实际跟踪误差模型被重构为
50、
51、其中,是轮毂电机出现故障的参数,并且它是有界的。
52、步骤302,采用滑模控制smc帮助lqr控制保持最佳性能,解决轮毂电机故障带来的负面影响,进一步得到不确定系统的ro控制器。
53、将ro控制器的控制率定义为lqr控制律u1和smc控制律u2之和,即u3=u1+u2。
54、当不确定系统在以下积分滑模面上运行时,跟踪轨迹将保持在与闭环动态系统相同的理想轨迹上:
55、
56、s滑模变量,h是常数矩阵,ξ是非线性函数。
57、为了减少smc中不可避免的抖振,提出了一种非奇异终端滑模面
58、
59、其中,λ>0为正常数,1<ab<2。特别地,a和b都是特定的奇数。
60、通过计算,得到smc控制律为
61、
62、其中,ψ(t)为非线性函数,ε和γ表示正系数,sgn()是符号函数。
63、通过采用ro控制器的控制率u3=u1+u2,车辆系统可以克服轮毂电机故障的影响,并在有限时间内稳定。
64、步骤303,设计速度跟踪控制器,为多轴车辆提供驱动力。
65、引入跟踪误差速度跟踪控制器提供的驱动力计算公式为
66、
67、其中,kp,ki和kd分别为比例部分、积分部分和微分部分的权重系数。
68、步骤304,通过以上设计的速度跟踪控制器和ro控制器,给多轴车辆系统提供afs和dyc命令;
69、从实际车辆系统的角度来看,采用一组两个无刷电机来移动支架组件,根据额外方向盘角度的命令直接校正驾驶员角度输入,车辆运动的响应时间忽略不计。因此,附加的前轮角度直接加到方向盘角度上。
70、步骤四,基于顶层控制器设计的结果进一步设计底层控制器,得到每个车轮的优化目标函数;
71、将顶层控制器计算的虚拟控制信号u=[fxδmz]t用作输出约束,使底层控制器针对不同工况用不同的开关策略,以分配每个车轮的驱动或制动力矩,进一步实现不同的控制或节能侧重,具体步骤如下:
72、步骤401,计算轮胎及电机的优化目标函数;
73、优化目标函数评估,利用路面利用率来约束实际轮胎力,轮胎的最大粘附极限为:
74、
75、第一个优化目标函数为
76、
77、其中μi表示每个车轮的比例重量,fzi表示车轮可测量的垂直载荷,gxi是非线性函数。
78、根据电机速度和扭矩获得轮内电机效率ηi,对于每个轮毂电机,功率损失来自电机正驱动和电机负再生制动。四轮电机总功率损失表示为
79、
80、因此,另一个优化目标函数为:
81、
82、其中,pmax=tmaxwmax是最大电动机转矩和最大车轮速度的乘积,gpi是非线性函数。
83、步骤402,进一步进行协调权重,根据式(23)优化目标函数评估和式(25)四轮电机总功率损失函数,以下不等式必须成立:
84、
85、从实际值xi和yi到圆边界的距离推导为
86、
87、其中,ξxiξpi分别为实际值xi和yi到圆边界的距离;sqrt()为平方根函数。
88、通过采用屏障函数,获得了协调的权重ψxi和ψpi分别为:
89、
90、步骤403,通过上述优化目标函数和权重分配,计算带约束的优化目标函数;
91、每个车轮的横摆力矩分配约束为
92、
93、将具有约束的最终优化目标函数重新排列,对横摆力矩进行重构分配,得到
94、
95、其中,bt为系数矩阵,ut为横摆力矩,uti为重构后各车轮的横摆力矩分配约束。
96、步骤五,通过gurobi求解器获得优化目标函数(31)的最优解,实现多轴车辆在处于轮毂电机故障和失效的情况下,在操纵性能上的综合最优控制策略。
97、与现有技术相比,本发明的有益效果如下:
98、(1)本发明弥补了平均lqr和smc方法的缺点,在顶层控制器中采用了一种新的ro控制方案,以在存在轮毂电机故障的情况下实现最优跟踪性能。同时进一步证明了ro控制器是无抖振的,并且系统可以在有限时间内收敛到原点,使多轴车辆获得更好的性能。
99、(2)本发明设计的底层控制器通过最优转矩矢量算法完成力矩的分配,并且还考虑到稳定性和经济性,利用所设计的极限圆和障碍函数理论自动调整每个执行器的权重系数,同时实现了多轴车辆的驾驶安全和节能性。
- 还没有人留言评论。精彩留言会获得点赞!