车辆稳定性控制方法、装置、车辆及存储介质与流程
本技术涉及车辆,特别涉及一种车辆稳定性控制方法、装置、车辆及存储介质。
背景技术:
1、车辆稳定性控制是提高驾驶员稳定性操纵、保障驾驶安全的有效方案。目前所提出的汽车侧向稳定性控制方法层出不穷,如集成侧向稳定控制、模型预测控制何鲁棒控制等。汽车在紧急转向工况下行驶中,轮胎的侧偏特性进入非线性区域,若轮胎所受侧向外力超过轮胎与地面间的附着力极限,就会导致侧滑,而轮胎侧滑会对车辆操纵稳定性产生巨大影响。
2、相关技术中,采用卡尔曼滤波器估计、自适应滑膜观测器等方法来估计侧偏角以解决上述问题。然而,由于车轮侧向力是车辆横向动力学里的关键组成,因此,相关技术中针对避免侧滑现象的研究并不全面,在针对复杂的、强非线性的汽车系统中,其车轮侧向力的表达并不精确,进而无法保证车辆的稳定行驶。
3、考虑到轮胎侧偏刚度是表征轮胎侧向力的重要参量,它受轮胎垂直载荷传递及当前路况状态等因素的影响而发生变化,故而产生不确定性。相关技术中,车辆的稳定性控制忽视了轮胎侧偏刚度的变化所造成的影响,仅将其认为一个定量在模型中去使用,这将对控制器的设计产生一定的局限性,从而严重影响车辆的稳定行驶,亟待解决。
技术实现思路
1、本技术提供一种车辆稳定性控制方法、装置、车辆及存储介质,以解决相关技术中,对车轮侧向力的表达不准确,将轮胎侧偏刚度设为定值造成控制器设计的局限性等问题,能够使轮胎侧偏刚度估计精度更高,误差更小,过程更加平滑,以基于该轮胎侧偏刚度实现车辆稳定性控制,有效地避免车辆发生侧滑,保证车辆的稳定行驶。
2、本技术第一方面实施例提供一种车辆稳定性控制方法,包括以下步骤:
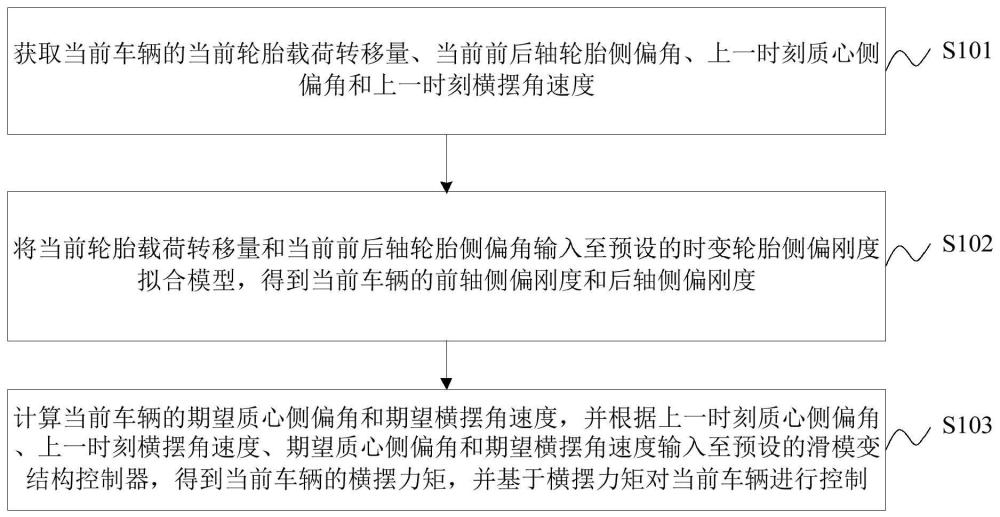
3、获取当前车辆的当前轮胎载荷转移量、当前前后轴轮胎侧偏角、上一时刻质心侧偏角和上一时刻横摆角速度;
4、将所述当前轮胎载荷转移量和所述当前前后轴轮胎侧偏角输入至预设的时变轮胎侧偏刚度拟合模型,得到所述当前车辆的前轴侧偏刚度和后轴侧偏刚度;
5、计算所述当前车辆的期望质心侧偏角和期望横摆角速度,并根据所述上一时刻质心侧偏角、所述上一时刻横摆角速度、所述期望质心侧偏角和所述期望横摆角速度输入至预设的滑模变结构控制器,得到所述当前车辆的横摆力矩,并基于所述横摆力矩对所述当前车辆进行控制。
6、可选地,在一些实施例中,所述计算所述当前车辆的期望质心侧偏角和期望横摆角速度,包括:
7、获取所述当前车辆的前轮转角和纵向速度;
8、将所述当前车辆的前轮转角和所述纵向速度输入至预设的车辆动力学模型,得到所述期望质心侧偏角和所述期望横摆角速度。
9、可选地,在一些实施例中,所述预设的车辆动力学模型为:
10、
11、其中,m11为系统的状态转移矩阵第1行,第1列元素,m12为系统的状态转移矩阵第1行,第2列元素,n11为为输入矩阵第1行,第1列元素,m21为系统的状态转移矩阵第2行,第1列元素,m22为系统的状态转移矩阵第2行,第2列元素,n21为输入矩阵第2行,第1列元素,n22为输入矩阵第2行,第2列元素,β为横摆角速度,γ为质心侧偏角,δf为车辆的前轮转角,mz为横摆力矩。
12、可选地,在一些实施例中,在将所述当前轮胎载荷转移量和所述当前前后轴轮胎侧偏角输入至所述预设的时变轮胎侧偏刚度拟合模型之前,还包括:
13、确定递推最小二乘法的辨识算法公式中的最小二乘估计值的第一初始值和协方差矩阵的第二初始值;
14、获取目标车辆在任一时刻的轮胎侧向力和前后轴轮胎侧偏角,并基于所述第一初始值、第二初始值和所述任一时刻的轮胎侧向力和前后轴轮胎侧偏角,根据所述递推最小二乘法的辨识算法公式计算所述任一时刻的参数估计值;
15、若所述任一时刻的参数估计值不满足预设收敛要求,则获取所述任一时刻的下一时刻的轮胎侧向力和前后轴轮胎侧偏角,直至计算得到的最新参数估计值满足所述预设收敛要求,得到所述预设的时变轮胎侧偏刚度拟合模型。
16、可选地,在一些实施例中,所述预设的滑模变结构控制器为:
17、
18、其中,d1为控制参数,-k1sγ为指数趋近项,sγ为基于横摆角速度定义的滑膜切换函数,ε1为用来描述任意动点向滑模面运动的速度,c1为正的控制器设计参数,γs为修正后的横摆角速度,γ为横摆角速度,c2为正的控制器设计参数,d2为控制参数,-k2sγ为指数趋近项,ε2为用来描述任意动点向滑模面运动的速度,sβ为基于质心偏测角定义的滑膜切换函数,βs为修正后的质心偏测角,β为质心偏测角。
19、本技术第二方面实施例提供一种车辆稳定性控制装置,包括:
20、获取模块,用于获取当前车辆的当前轮胎载荷转移量、当前前后轴轮胎侧偏角、上一时刻质心侧偏角和上一时刻横摆角速度;
21、建模模块,用于将所述当前轮胎载荷转移量和所述当前前后轴轮胎侧偏角输入至预设的时变轮胎侧偏刚度拟合模型,得到所述当前车辆的前轴侧偏刚度和后轴侧偏刚度;
22、控制模块,用于计算所述当前车辆的期望质心侧偏角和期望横摆角速度,并根据所述上一时刻质心侧偏角、所述上一时刻横摆角速度、所述期望质心侧偏角和所述期望横摆角速度输入至预设的滑模变结构控制器,得到所述当前车辆的横摆力矩,并基于所述横摆力矩对所述当前车辆进行控制。
23、可选地,在一些实施例中,所述控制模块,具体用于:
24、获取所述当前车辆的前轮转角和纵向速度;
25、将所述当前车辆的前轮转角和所述纵向速度输入至预设的车辆动力学模型,得到所述期望质心侧偏角和所述期望横摆角速度。
26、可选地,在一些实施例中,所述预设的车辆动力学模型为:
27、
28、其中,m11为系统的状态转移矩阵第1行,第1列元素,m12为系统的状态转移矩阵第1行,第2列元素,n11为输入矩阵第1行,第1列元素,m21为系统的状态转移矩阵第2行,第1列元素,m22为系统的状态转移矩阵第2行,第2列元素,n21为输入矩阵第2行,第1列元素,n22为输入矩阵第2行,第2列元素,β为横摆角速度,γ为质心侧偏角,δf为车辆的前轮转角,mz为横摆力矩。
29、可选地,在一些实施例中,在将所述当前轮胎载荷转移量和所述当前前后轴轮胎侧偏角输入至所述预设的时变轮胎侧偏刚度拟合模型之前,所述建模模块,还用于:
30、确定递推最小二乘法的辨识算法公式中的最小二乘估计值的第一初始值和协方差矩阵的第二初始值;
31、获取目标车辆在任一时刻的轮胎侧向力和前后轴轮胎侧偏角,并基于所述第一初始值、第二初始值和所述任一时刻的轮胎侧向力和前后轴轮胎侧偏角,根据所述递推最小二乘法的辨识算法公式计算所述任一时刻的参数估计值;
32、在所述任一时刻的参数估计值不满足预设收敛要求的情况下,获取所述任一时刻的下一时刻的轮胎侧向力和前后轴轮胎侧偏角,直至计算得到的最新参数估计值满足所述预设收敛要求,得到所述预设的时变轮胎侧偏刚度拟合模型。
33、可选地,在一些实施例中,所述预设的滑模变结构控制器为:
34、
35、其中,d1为控制参数,-k1sγ为指数趋近项,sγ为基于横摆角速度定义的滑膜切换函数,ε1为用来描述任意动点向滑模面运动的速度,c1为正的控制器设计参数,γs为修正后的横摆角速度,γ为横摆角速度,c2为正的控制器设计参数,d2为控制参数,-k2sγ为指数趋近项,ε2为用来描述任意动点向滑模面运动的速度,sβ为基于质心偏测角定义的滑膜切换函数,βs为修正后的质心偏测角,β为质心偏测角。
36、本技术第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆稳定性控制方法。
37、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的车辆稳定性控制方法。
38、由此,本技术将获取到的车辆的当前轮胎载荷转移量和当前前后轴轮胎侧偏角输入至时变轮胎侧偏刚度拟合模型,得到当前车辆的前轴侧偏刚度和后轴侧偏刚度,从而计算当前车辆的期望质心侧偏角和期望横摆角速度,并根据上一时刻质心侧偏角、上一时刻横摆角速度、期望质心侧偏角和期望横摆角速度输入至预设的滑模变结构控制器,得到当前车辆的横摆力矩,并基于横摆力矩对当前车辆进行控制。由此,本技术通过侧偏刚度辨识,克服了相关技术中将侧偏刚度设为定值导致的较大误差问题,并利用滑模原理设计汽车稳定性控制策略,通过对质心侧偏角及横摆角速度跟踪控制,得到保持车辆稳定行驶的横摆力矩,有效地避免车辆发生侧滑,保证车辆的稳定行驶。
39、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!