一种电机驱动系统、车辆、充电方法与流程
本技术涉及充电,尤其涉及一种电机驱动系统、车辆、充电方法。
背景技术:
1、通常,充电桩分为两种输出规格,分别为200-500v,200-750v。若电动车辆的动力电池的电压高于充电桩输出电压时,无法对动力电池进行快充。例如,动力电池的电压为500-750v,则输出电压为200-500v的充电桩无法对动力电池进行快充。
2、为实现对动力电池进行快充,第一种方案为在电动车辆中增加升压电路,对充电桩提供的电压进行升压处理,升压处理后的电压提供给动力电池,实现对动力电池升压充电。这将提升电动车辆的成本,重量和体积。
3、第二种方案为复用电机。通过复用电机中的线圈,对充电桩提供的电压进行升压处理。电机是电动车辆中重要装置,电机性能会影响车辆的运行状态。目前,亟需在车辆驻车充电过程中,提升电机性能的解决方案。
技术实现思路
1、本技术提供一种电机驱动系统、车辆、充电方法、控制装置及介质,可以对车辆充电过程中,提升电机性能,如降低充电时的轮端扭矩或者减少电机发热。
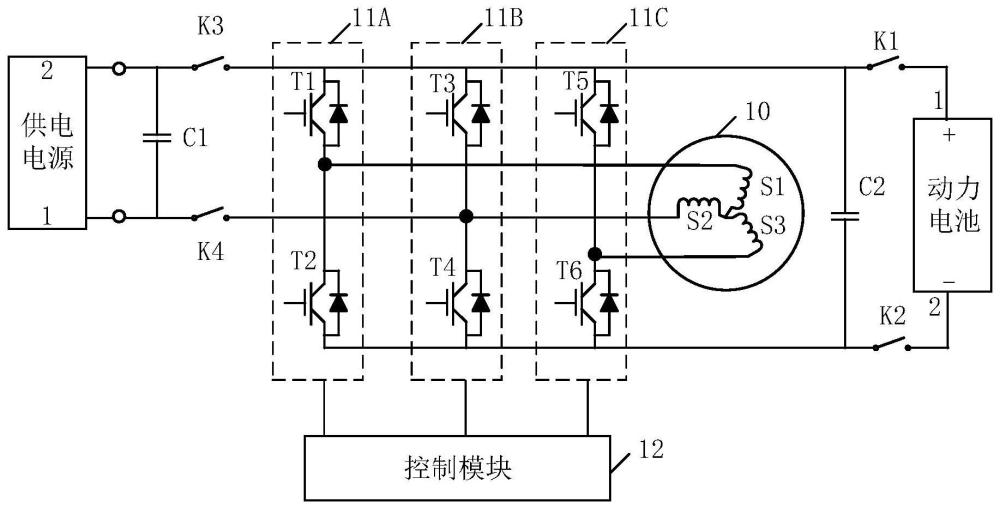
2、第一方面,本技术提供一种电机驱动系统,可以包括:多个桥臂、电机和控制模块;所述多个桥臂中的每个桥臂包括第一开关和第二开关,所述第一开关的第一端与动力电池的第一极耦合,所述第一开关的第二端与所述第二开关的第一端耦合,所述第二开关的第二端与所述动力电池的第二极耦合;所述电机包括多个绕组,所述多个绕组与所述多个桥臂一一对应;所述多个绕组中的每个绕组的第一端与公共端点耦合;所述每个绕组的第二端与对应的桥臂中的第一开关的第二端耦合;所述多个桥臂中的第一桥臂的第一开关的第二端与供电电源的第一极耦合,所述供电电源的第二极与所述动力电池耦合;所述控制模块用于获取所述电机中转子的位置角;以及采用所述转子的位置角对应的控制方式,对所述多个桥臂中除所述第一桥臂之外的桥臂进行控制,使所述供电电源对所述动力电池充电。
3、本技术实施例中,控制模块可以通过控制与电机耦合的桥臂,复用电机中的绕组,对动力电池充电。并且控制模块采用电机中转子的位置角对应的控制方式对电机进行控制,可以提升对动力电池充电过程中电机的性能,例如降低电机损耗(如磁钢损耗)从而降低电机热风险或者降低电机输出转矩(或扭矩)。电机控制中,通常以三相坐标系中一相零度作为基准,转子的位置角和定子矢量均以该基准计量。例如图1中电机10中的绕组s1可记为u相绕组,s2记为w相绕组,绕组s3可记为v相绕组。便于介绍,本技术中转子的位置角和定子磁场矢量(也成定子矢量)可以以电机的多相中的u相零度为基准。
4、一种可能的设计中,所述转子的位置角对应的控制方式根据预设的位置角集合与控制方式关系确定,所述位置角集合与控制方式关系包括不同位置角集合与不同控制方式的对应关系,其中,每个所述位置角集合包括一个或多个位置角。
5、本技术实施例中,控制模块可以根据预设的位置角集合与控制方式确定,获取的转子的位置角对应的控制方式。控制模块可以预先获取或者村组所述位置角集合与控制方式。不同位置角集合对应的控制方式可能相同或不同。每个位置角集合可以包括一个或多个位置角。控制模块可以采用获取的电机中转子的位置角所属位置角集合对应的控制方式对电机中的桥臂进行控制。可见,电机转子的位置角不同对应的控制方式可能不同,控制模块可以采用多种控制方式对于电机连接的桥臂进行控制。由于对电机控制方式不同,电机性能也不同。控制模块可以采用不同的控制方式,对桥臂进行控制,提升电机性能。例如,使电机的磁钢损耗较低,电机转矩较低。
6、一种可能的设计中,所述控制方式包括并联同相控制方式、并联交错控制方式和串联控制方式中的一种;所述控制模块对所述多个桥臂中的开关进行控制时,具体用于:若所述转子的位置角对应的控制方式为所述并联同相控制方式,控制所述多个桥臂中除所述第一桥臂之外的两个桥臂中的主开关周期性的处于导通状态,且导通起始时刻相同,结束时刻相同;或者,若所述转子的位置角对应的控制方式为所述并联交错控制方式,控制所述多个桥臂中除所述第一桥臂之外的两个桥臂中的主开关周期性的处于导通状态,且导通起始时刻不同,和/或结束时刻不同;或者,若所述转子的位置角对应的控制方式为所述串联控制方式,控制多个桥臂中除所述第一桥臂之外的任意一个桥臂中的主开关周期性的处于导通状态;其中,若所述供电电源的第二极与所述动力电池的第一极耦合,所述主开关为所述第一开关,若所述供电电源的第二极与所述动力电池的第二极耦合,所述主开关为所述第二开关。
7、本技术实施例中,对动力电池进行充电,控制模块可以采用电机转子的位置角对应的控制方式对电机进行控制。电机转子的位置角不同对应的控制方式可能不同,控制模块可以采用多种控制方式对于电机连接的桥臂进行控制。由于对电机控制方式不同,电机性能也不同。控制模块可以采用不同的控制方式,对桥臂进行控制,提升电机性能。例如,使电机的磁钢损耗较低,电机转矩较低。
8、一种可能的设计中,若所述转子的位置角所属位置角集合对应的控制方式为所述并联交错控制方式;所述控制模块,还用于:调整所述两个桥臂中的至少一个桥臂的主开关的导通时长,使所述两个桥臂分别耦合的绕组中的电流比例改变。
9、本技术实施例中,控制模块采用并联交错控制方式时,不仅可以控制所述多个桥臂中除所述一个桥臂之外的两个桥臂中的主开关周期性的处于导通状态,且导通起始时刻相同,结束时刻相同,还可以改变两个桥臂中至少一个主开关的导通时长,从而改变两个桥臂连接的绕组处的电流比例。由于定子矢量可以通过调整两个桥臂连接的绕组处的电流比例进行调整,对动力电池充电过程中,定子矢量角度的变化可能导致定子矢量与转子的位置角的相对角度发生变化,电机输出扭矩,转子的位置角发生改变。因而可根据变化后的转子位置角重新确定控制方式,控制模块可以再次获取电机的转子位置角,以及采用最近一次获取电机的转子位置角所属位置角集合对应对的控制方式对桥臂进行控制,增大电机性能可控范围。
10、一种可能的设计中,所述位置角集合与控制方式关系是基于下述至少一种确定的:在所述位置角集合中任一位置角情况下,所述控制模块采用所述不同控制方式中每种控制方式分别对所述多个桥臂中除所述第一桥臂之外的其它桥臂进行控制时,所述电机的转矩;或者,在所述位置角集合中任一位置角情况下,所述控制模块采用所述不同控制方式中每种控制方式分别对所述多个桥臂中除所述第一桥臂之外的其它桥臂进行控制时,所述电机的损耗。
11、本技术实施例中,电机损耗通常包括磁钢损耗、磁滞损耗等,电机损耗过高可使电机热风险过高。位置角集合与控制方式可以是根据控制模块采用每种控制方式对电机桥臂进行控制时转子的位置角与电机磁钢损耗的关系进行确定的,如根据在各位置角集合中任一位置角情况下电机的损耗;和/或,是根据转子的位置角与电机转矩的关系确定的,如根据在各位置角中任一位置角情况下电机的转矩。这样的设计便于控制模块采用获取的转子位置角对应的控制方式,使得电机损耗较低或者电机转矩较低。例如控制模块获取转子的位置角后,可以按照获取的转子位置角所属位置角集合对应的控制方式进行控制,实现在对动力电池充电过程中,电机性能可控。
12、一种可能的设计中,所述控制模块还可以在所述获取所述电机中转子的位置角之前,确定所述电机驱动系统所属车辆处于停车状态或者驻车状态。本技术实施例中,对动力电池充电前可以确定车辆处于停车状态或者驻车状态。在车辆处于停车状态或者驻车状态下,复用车辆中的电机,对动力电池进行充电,并可以提升电机性能。
13、一种可能的设计中,控制模块采用转子位置角对应的控制方式对桥臂进行控制后,也即控制模块控制电机开始对动力电池充电,电机就会产生扭矩(或转矩),也即电机输出转矩会发生变化。此时,电机产生的扭矩可能导致电机的转子的位置角也可能发生变化。电机的转子的位置角一般在电机驱动系统所属车辆的轮端与电机端之间的传动装置,如轴、齿轮等的齿间隙内改变。控制模块可以实时获取电机的转子位置角,以及采用最近一次获取电机的转子位置角对应对的控制方式对桥臂进行控制,提升电机性能。
14、第二方面,本技术提供一种充电方法,可以应用于电机驱动系统,所述电机驱动系统包括多个桥臂和电机;所述多个桥臂中的每个桥臂包括第一开关和第二开关,所述第一开关的第一端与动力电池的第一极耦合,所述第一开关的第二端与所述第二开关的第一端耦合,所述第二开关的第二端与所述动力电池的第二极耦合;所述电机包括多个绕组,所述多个绕组与所述多个桥臂一一对应;所述多个绕组中的每个绕组的第一端与公共端点耦合;所述每个绕组的第二端与对应的桥臂中的第一开关的第二端耦合;所述多个桥臂中的第一桥臂的第一开关的第二端与供电电源的第一极耦合,所述供电电源的第二极与所述动力电池耦合;所述方法包括:获取所述电机中转子的位置角;采用所述转子的位置角对应的控制方式,对所述多个桥臂中除所述第一桥臂之外的桥臂进行控制,使所述供电电源对所述动力电池充电。
15、一种可能的设计中,所述控制方式包括并联同相控制方式、并联交错控制方式和串联控制方式中的一种;所述对所述多个桥臂中除所述一个桥臂之外的桥臂进行控制,包括:若所述转子的位置角对应的控制方式为所述并联同相控制方式,控制所述多个桥臂中除所述一个桥臂之外的两个桥臂中的主开关周期性的处于导通状态,且导通起始时刻相同,结束时刻相同;或者,若所述转子的位置角对应的控制方式为所述并联交错控制方式,控制所述多个桥臂中除所述一个桥臂之外的两个桥臂中的主开关周期性的处于导通状态,且导通起始时刻不同,和/或结束时刻不同;或者,若所述转子的位置角对应的控制方式为所述串联控制方式,控制多个桥臂中除所述一个桥臂之外的任意一个桥臂中的主开关周期性的处于导通状态;其中,若所述供电电源的第二极与所述动力电池的第一极耦合,所述主开关为所述第一开关,若所述供电电源的第二极与所述动力电池的第二极耦合,所述主开关为所述第二开关。
16、一种可能的设计中,若所述电机转子的位置角对应的控制方式为所述并联交错控制方式,所述控制所述多个桥臂中除所述第一桥臂之外的两个桥臂中的主开关周期性的处于导通状态,且导通起始时刻不同,和/或结束时刻不同,还包括:调整所述两个桥臂中的至少一个桥臂的主开关的导通时长,使所述两个桥臂分别耦合的绕组中的电流比例改变。
17、一种可能的设计中,所述转子的位置角对应的控制方式根据预设的位置角集合与控制方式关系确定,所述位置角集合与控制方式关系包括不同位置角集合与不同控制方式的对应关系,其中,每个所述位置角集合包括一个或多个位置角。
18、一种可能的设计中,所述位置角集合与控制方式关系是基于下述至少一种确定的:在所述位置角集合中任一位置角情况下,采用所述不同控制方式中每种控制方式分别对所述多个桥臂中除所述第一桥臂之外的桥臂进行控制时,所述电机的转矩;在所述位置角集合中任一位置角情况下,采用所述不同控制方式中每种控制方式分别对所述多个桥臂中除所述第一桥臂之外的桥臂进行控制时,所述电机的损耗。
19、一种可能的设计中,在所述获取所述电机中转子的位置角之前,所述方法还包括:确定所述电机驱动系统所属车辆处于停车状态或者驻车状态。
20、一种可能的设计中,在所述对所述多个桥臂中除所述一个桥臂之外的桥臂进行控制之后,所述方法还包括:重新获取所述电机中转子的位置角;以及根据所述位置角集合与控制方式关系,以及重新获取的所述转子的位置角,采用所述重新获取的转子的位置角所属位置角集合对应的控制方式,对所述多个桥臂中除所述一个桥臂之外的桥臂进行控制。
21、第三方面,本技术提供一种控制装置,包括存储器和处理器;所述存储器中存储有计算机指令;所述处理器读取所述计算机指令,执行如执行第二方面中任一设计所述的方法。
22、第四方面,本技术提供一种计算机可读存储产品,存储有计算机指令,当所述计算机指令被控制装置执行时,使得所述控制装置执行如执行第二方面中任一设计所述的方法。
23、第五方面,本技术提供一种电动车辆,包括如第一方面中任一设计所述的电机驱动系统。
24、第二方面至第五方面中任一方面中的任一可能设计可以达到的技术效果,请参照上述第一方面中的任一可能设计可以达到的技术效果,这里不再重复赘述。
- 还没有人留言评论。精彩留言会获得点赞!